Оборудование современных ТЭС и АЭС эксплуатируется при высоких тепловых нагрузках, которые требует жесткого ограничения толщины отложений на поверхностях нагрева в связи с условиями температурного режима их металла на протяжении рабочей кампании. Такие отложения образуются из примесей, которые поступают в циклы электростанций, в том числе и с добавочной водой, поэтому обеспечение высокого качества водных теплоносителей ТЭС и АЭС является важнейшей задачей. Использование водного теплоносителя высокого качества упрощает также решение задач получение чистого пара, минимизации скоростей коррозии конструктивных материалов котлов, турбин и оборудования конденсатно - питательного тракта. Таким образом, качество обработки воды на ТЭС и АЭС тесным образом связано с надежностью и экономичностью эксплуатации современного високоинтенсивного котло - турбинного оборудования, с безопасностью ядерных энергетических установок.
[5]
Данное исследование носит сугубо учебный характер.
Теоретический анализ.
Общие сведение о водно - химических режимах и водоподготовительных установках ТЭС
Водно-химический режим электростанции - это комплекс мероприятий по минимизации коррозионных процессов и процессов образования отложений в водопаровом тракте и основном оборудовании. К числу этих мероприятий относятся прежде всего мероприятия по кондиционированию состава теплоносителя. Для этого каждая электростанция располагает системой ВПУ, объединенных общей целью подготовки и поддержания состава питательной воды котлов и пара перед турбиной в соответствии с нормами Правил технической эксплуатации электростанций и сетей (ПТЭ).
Система ВПУ каждой современной электростанции включает: установку химводоочистки, предназначенную для химической очистки добавочной (исходной) воды, восполняющей потери в водопаровом тракте и теплосети, а также для очистки конденсата, возвращаемого с производства, и установку, предназначенную для коррекционной обработки конденсата турбин и питательной воды путем введения в конденсатно-питательный тракт корректирующих реагентов в соответствии с принятым водно-химическим режимом. Кроме того, на электростанциях с энергоблоками СКД имеется блочная обессоливающая установка (БОУ) для очистки турбинного конденсата, а на электростанциях с барабанными котлами - установка для коррекционной обработки котловой воды. Следует отметить, что на ряде зарубежных электростанций очистка турбинного конденсата производится и для энергоблоков с барабанными котлами.
Химводоочистка (ХВО) состоит из установки предварительной очистки воды и установки ее последующего химического обессоливания.[6]
К установкам предварительной очистки относят осветлитель и механический фильтр (фильтры).
Осветлитель предназначен для проведения процесса содоизвесткования с целью снижения щелочности и жесткости, удаления органических веществ и механических примесей.
В осветлителях осуществляются процессы смешивания обрабатываемой воды с дозируемыми реагентами, образования осадка (шлама) и взвешивания его восходящим потоком воды, контактирования обрабатываемой воды с осадком, отделения ее от осадка (осветление), отведения излишков осадка из контактной зоны, уплотнения (обезвоживание) осадка и удаления его с продувочной водой в дренаж.
После осветлителей остаточное содержание взвеси в коагулированной и известкованной воде обычно составляет не менее 10-20 мг/л. Более глубокое удаление взвешенных веществ из воды достигается фильтрованием ее через зернистую загрузку из инертных частиц небольшого размера (механический фильтр).
Реально механические фильтры с правильно подобранной и тщательно отмытой фильтрующей загрузкой обеспечивают остаточное содержание взвеси в фильтрате на уровне 1 -1,5 мг/л.
Фильтрование исходной воды заканчивается по достижении одного из следующих показателей: заданного перепада давления на фильтрующем слое; продолжительности работы фильтра либо пропуска заданного объема воды; увеличения мутности фильтрата.
После завершения рабочего цикла фильтр отключается от магистральных трубопроводов для отмывки фильтрующего материала от задержанных им примесей. Для этого фильтрующая загрузка промывается восходящим потоком воды. Взрыхляющая промывка заканчивается по заданному времени промывки либо по резкому снижению мутности взрыхляющей воды после механического фильтра. [8]
Химическое обессоливание воды осуществляется методом ионного обмена путем пропуска ее через ряд последовательно включенных фильтров. Каждая установка химического обессоливания состоит из комбинаций Н-катионитных и ОН-анионитных фильтров I и II ступеней, где путем обмена на ионы Н и ОН из обрабатываемой воды удаляются катионы кальция, магния, натрия и анионы сильных (серная, соляная) и слабых (угольная, кремниевая) кислот. При истощении ионообменных материалов производится их восстановление путем пропуска через них регенерационных растворов кислоты (для катионитных фильтров) или щелочи (для анионитных фильтров). На электростанциях сверхкритических параметров на химводоочистке устанавливают катионитные и анионитные фильтры III ступени. При этом зачастую катионирование и анионирование производят одновременно в одном фильтре смешанного действия (ФСД).
Выбор объекта автоматизвции
Сложность автоматизации механических и ионообменных фильтров заключается в том, что нет ярко выраженного управляющего воздействия, каковым является, например, реагент в осветлителе. Помимо этого и механический и ионообменный фильтры время от времени необходимо отключать на промывку или регенерацию, в связи с чем здесь не приходится говорить лишь о системе автоматизированного управления, но о целом комплексе автоматизированных систем, исследование которого является трудоемким, что в пределах магистерской работы проблематично. Поэтому в качестве объекта автоматизации и исследования выбирается осветлитель, точнее, процесс известкования, происходящий в нем.
Описание процесса, выбранного для автоматизвции.
Описание процесса, выбранного для автоматизвции.
Известковый метод умягчения воды
Известкование воды применяется для удаления карбонатной (временной) жесткости воды с соответствующим снижением щелочности и уменьшения количества сухого остатка.
Одновременно из воды удаляются естественные механические примеси, органические загрязнения, соединения железа и кремнекислоты.
При известковании воды протекают следующие процессы:
Прежде всего из воды удаляется свободная углекислота CO2 и образуется труднорастворимое, выпадающее в осадок соединение - углекислый кальций CaCO3:
CO2+Ca(OH)2-->CaCO3+H2O
При введении извести в большем количестве, чем это необходимо для связывания свободной угольной кислоты, в воде повышается содержание гидроксильных ионов OH-, что приводит к переходу бикарбонатов HCO3- в карбонаты CO32-:
OH-+HCO3--->CO32-+H2O
Карбонаты образуют с находящимися в воде ионами кальция Ca2+ выпадающий в осадок карбонат кальция CaCO3.
Ионы магния Mg2+, взаимодействуя с гидроксильными ионами, выделяются в осадок в виде труднорастворимого гидрата окиси магния Mg(OH)2:
Mg2++2OH--->Mg(OH)2
В молекулярной форме реакции, протекающие при известковании, выражаются следующими уравнениями:
Ca(HCO3)2+Ca(OH)2-->2CaCO3+2H2O,
Mg(HCO3)2+2Ca(OH)2-->Mg(OH)2+2CaCO3+2H2O,
MgSO4+Ca(OH)2-->Mg(OH)2+CaSO4,
MgCl2+Ca(OH)2-->Mg(OH)2+CaCl2,
CO2+Ca(OH)2-->CaCO3+H2O,
Fe2(SO4)3+3Ca(OH)2-->2Fe(OH)3+3CaSO4.
Mg(HCO3)2+2Ca(OH)2-->Mg(OH)2+2CaCO3+2H2O,
MgSO4+Ca(OH)2-->Mg(OH)2+CaSO4,
MgCl2+Ca(OH)2-->Mg(OH)2+CaCl2,
CO2+Ca(OH)2-->CaCO3+H2O,
Fe2(SO4)3+3Ca(OH)2-->2Fe(OH)3+3CaSO4.
Норму дозирования известкового молока определяют по формуле:
Dизв=(CO2)исх+(HCO3)исх+(Mg)исх+Иизв, мг-экв/л,
где
(CO2)исх - свободная растворенная углекислота в исходной воде, мг - экв/л;
(HCO3)исх- щелочность исходной воды, мг - экв/л;
(Mg)исх - магниева жесткость исходной воды, мг - экв/л;
Иизв - избыток гидратной щелочности, мг - экв/л. [9]
Методы контроля выходной величины.
Методы контроля выходной величины.
Кондуктометрический метод контроля качества обессоленной воды
Способность вещества проводить электрический ток можно ли характеризовать электрической проводимостью его, или, наоборот, сопротивлением.
Электрическая проводимость разбавленного раствора и концентрации растворенных в нем веществ связанны друг с двугом прямолинейной зависимостью. Отсюда следует, что измерение электрической проводимости (кондуктометрия) может в принципе служить для определения концентраций растворенных веществ.
Удельным сопротивлением r называется сопротивление столбика вещества длиной 1 см и при поперечном сечении 1 см2. Если проводник длиной l 1 см с поперечным сечением s см2 обладает общим сопротивлением R, то удельное сопротивление r определяется соотношением
r=(R·s)/l.
В электрохимии вместо удельного сопротивления обычно пользуются удельной электрической проводимостью µ, определяя ее как величину, обратную удельному сопротивлению
µ=1/r.
Так как r выражается в Ом*см, то единицей проводимости µ служит Ом-1··см-1.
При повышении температуры на 1 градус µ увеличивается приблизительно на 2-2,5% вследствие уменьшения гидратации ионов и понижения вязкости раствора. В связи с этим все кондуктометрические измерения либо проводят при постоянной температуре, либо в результате измерения вводят соответствующие температурные поправки, либо в схему измерения вводят температурную компенсацию.
Измерение электропроводности делают серийно изготавливаемыми кондуктометрами лабораторного и промышленного типов. Основной частью кондуктометров любого типа есть датчик (первичный преобразователь), в качестве которого используются измерительные электрохимические ячейки, представляющие собою заполненный анализируемым раствором сосуд с жестко закрепленными в нем двумя электродами. Конструкция ячеек должна быть такой, чтобы обеспечить измерение электропроводности с наименьшей погрешностью. Основной характеристикой ячейки есть постоянная А, см-1, что выражает отношение ее геометрических размеров: расстояния между электродами l к площади их поперечного сечения s:
l/s=A.
С использованием понятия о постоянной электропроводность ионного проводника (раствора электролита) в электрохимической ячейке выражается как
µ=A·(1/R).
Так как передача электричества через раствор осуществляется движением ионов, то удельная электрическая проводимость раствора тем выше, чем больше концентрация ионов и чем больше их абсолютные скорости. Чистая вода, вследствие ничтожно малой диссоциации, почти не имеет проводимости. Последняя возникает, однако, при введении у нее первых же порций электролита и увеличивается по мере добавления новых порций его параллельно с возрастанием концентрации ионов. Когда концентрация раствора становится достаточно большой (в случае хорошо растворимых электродов), то с увеличением ее степень диссоциации сильно уменьшается или в растворах сильных электролитов возрастает влияние взаимного притяжения ионов. Влияние это может стать более сильным, чем влияние увеличения общей концентрации электролита в растворе. В таком случае с увеличением концентрации электролита удельная электрическая проводимость раствора будет уменьшаться. [7]
Нетрудно показать, что зависимость электрического сопротивления воды от ее химического состава имеет ярко выраженный экстремум.

эта картинка анимирована
Рисунок 1 - Кривая зависимости электрического сопротивления воды от ее химического состава
По оси ординат - сопротивление воды, по оси абсцисс положение регулирующего органа - клапана соотношения известкового молока и сырой воды.
Математическое описание объекта управления
Исследуемый объект (осветлитель) представляет собой инерционное звено второго порядка с запаздыванием. Как часть объекта в магистерской работе рассматривается и кондуктометрический датчик. Таким образом, объект представлен двумя звеньями:
1 - линейная инерционная часть (осветлитель);
2 - нелинейная безынерционная часть (кондуктометрический датчик).
Структурная схема объекта управления представлена на рис.2:

Рисунок 2 - Структурная схема объекта управления
Линейная часть объекта управления описывается следующей передаточной функцией:

Переходной процесс на выходе линейной части:

Рисунок 3 - Переходной процесс на выходе линейной части
Нелинейная часть приближенно описывается следующим уравнением:

где R(t) - регулируемая величина или показатель экстремума;
K(t) - управляющее воздействие;
µ(t)-возмущение, которое перемещает экстремальную характеристику объекта (рис. 1) в горизонтальном направлении;
µ'(t)-возмущение, которое перемещает экстремальную характеристику объекта в вертикальном направлении;
a(t)-крутизна характеристики объекта управления.
Статическая характеристика нелинейной части представлена на рис.1.
Обзор систем экстремального регулирования объектом с большой инерционностью
Сущность данного исследования заключается в отыскании оптимального принципа управления процессом известкования в осветлителе, который является важнейшей частью химводоочистки для паровых котлов тепловой электростанции. Ограничением на принцип управления для рассматриваемого объекта является его инерционность. Для инерционного объекта наиболее применимы шаговые системы экстремального управления, принцип работы которых рассматривается в литературе [1, 2, 3]. Конкретно для осветлителя была предложена дифференциальная система экстремального управления автором [1].
Рассмотрим эти принципы построения систем экстремального управления.
1.Шаговые системы экстремального регулирования.
Использование шаговых экстремальных регуляторов дает возможность улучшить динамические особенности систем регулирования. Подбирая определенным образом период регулирования и длительность импульсов, можно снизить к минимуму амплитуду автоколебаний системы около экстремума при значительной инерционности объекта регулирования. В шаговых системах легко достигается пропорциональность управления.
Структурная схема простейшего регулятора шагового типа приведена на рис.4.
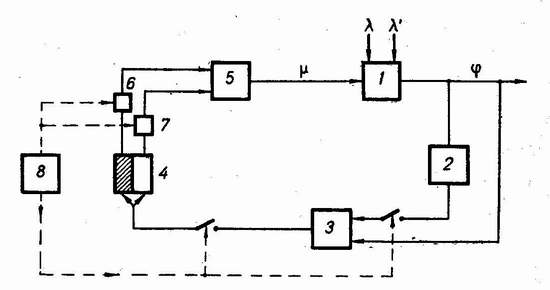
Рисунок 4 - Структурная схема шаговой системы
Здесь:
1 - объект (экстремальная статическая характеристика);
2 - запоминающее устройство;
3 - устройство сравнения;
4 - триггер;
5 - исполнительный элемент;
6 и 7 - логическое устройство типа "И";
8 - генератор импульсов.
Характерной особенностью шаговой системы является внешний генератор импульсов, который периодически включает цепь регулирования исполнительного элемента. Устройство сравнения 3 в момент каждого импульса сравнивает два значения регулируемой величины Rn и Rn-1, которые отвечают во времени значениям n и n-1 периода регулирования. Период регулирования равен промежутку времени между двумя последовательными импульсами.
Триггер изменяет свое положение, если
 ,
,
где  - порог срабатывания триггера. Поэтому в приведенной схеме триггер выполняет роль логичного устройства, которое учитывает знак предыдущего значения управляющего воздействия.
- порог срабатывания триггера. Поэтому в приведенной схеме триггер выполняет роль логичного устройства, которое учитывает знак предыдущего значения управляющего воздействия.
Исполнительный элемент управляется от триггера в моменты срабатывания генератора импульсов, причем направление движения исполнительного элемента зависит от состояния триггера.
Учитывая обязательную зону нечувствительности регулятора, закон регулирования приведенной системы можно записать в виде:
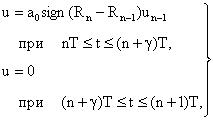
если 
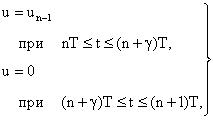
если 
где  =const - длительность импульсов;
=const - длительность импульсов;
=const - длительность импульсов;
Т - период регулирования;
Rn и Rn-1- значения регулируемой величины на n и n-1 периоде;
u - напряжение, которое подается на исполнительный элемент;
a0- постоянная величина.
Достоинство шаговых систем: высокое качество работы с объектами с большой инерционностью и запаздыванием. Есть возможность реализации алгоритма с различным темпом поиска экстремума.
2. Дифференциальная система, использующая принцип смещения экстремальных характеристик.
Основной особенностью рассматриваемой системы является то, что при помощи линейного преобразователя, который использует принцип смещения экстремальных характеристик, экстремальная система превращается в линейную следящую систему.
На практике часто встречаются объекты управления, нелинейная часть которых сравнительно просто поддается моделированию. Примером этого может быть множество объектов химической промышленности. В этих объектах с основного резервуара легко отбирать небольшие пробы в специальные пробники (или датчики), и на основе этих проб создавать модели.
На рис. 5а приведена структурная схема такой системы. Управляющие и возмущающие воздействия в этой системе действуют не только на объект управления, но и на две модели. Кроме этого, на эти модели действуют одинаковые и постоянные по модулю, но разные по знаку дополнительные управляющие воздействия, под действием которых статические экстремальные характеристики моделей смещаются относительно характеристики объекта в одной модели вправо, в другой - влево (рис. 5б).
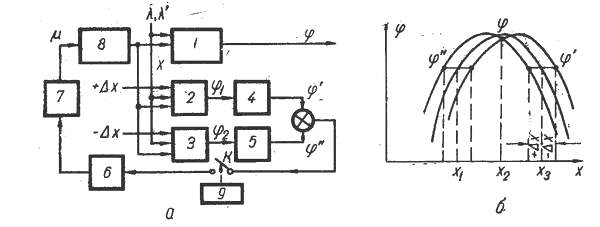
Рисунок 5 - Дифференциальная система с моделями
Здесь:
а - структурная схема:
1 - нелинейная безынерционная часть объекта;
2, 3 - модели объекта;
4-6 - усилитель;
7 - исполнительный элемент;
8 - линейная инерционная часть объекта;
9 - генератор импульсов (при рассмотрении непрерывной системы ключ К должен быть замкнутым);
б - график статических характеристик системы.
Рассмотрим этот процесс детальнее. Допустим, что на вход обеих моделей и на объект регулирования подается управляющее воздействие х1. Тогда выходная величина первой модели, которая соответствует  , будет равна
, будет равна  , а выходная величина второй модели, которая соответствует
, а выходная величина второй модели, которая соответствует  , будет равна
, будет равна  . Такие же рассуждения можно привести и для случая, когда на вход моделей и объекта регулирования подается управляющее воздействие x3.
. Такие же рассуждения можно привести и для случая, когда на вход моделей и объекта регулирования подается управляющее воздействие x3.
, а выходная величина второй модели, которая соответствует , будет равна . Такие же рассуждения можно привести и для случая, когда на вход моделей и объекта регулирования подается управляющее воздействие x3.
Таким образом, рассмотрев несколько значений управляющего воздействия, можно убедиться в том, что статические экстремальные характеристики моделей смещены относительно действительной характеристики объекта регулирования. Поскольку на модели влияют все те воздействия, которые действуют на объект, то при перемещении характеристики объекта характеристики моделей будут перемещаться, не меняя положения как относительно характеристики объекта, так и относительно одна другой.
Датчики, установленные на каждой модели, измеряют показатели экстремума  и
и  . Показания датчиков подаются на устройство сравнения дифференциального регулятора, а результат сравнения - на усилитель. Дифференциальный регулятор поддерживает равенство
. Показания датчиков подаются на устройство сравнения дифференциального регулятора, а результат сравнения - на усилитель. Дифференциальный регулятор поддерживает равенство  . Это равенство выполняется только при значении управляющего воздействия x2, которое соответствует экстремуму реальной характеристики объекта регулирования.
. Это равенство выполняется только при значении управляющего воздействия x2, которое соответствует экстремуму реальной характеристики объекта регулирования.
и . Показания датчиков подаются на устройство сравнения дифференциального регулятора, а результат сравнения - на усилитель. Дифференциальный регулятор поддерживает равенство . Это равенство выполняется только при значении управляющего воздействия x2, которое соответствует экстремуму реальной характеристики объекта регулирования.
Таким образом, управляющее воздействие в рассматриваемой системе формируется в зависимости от величины и знака разницы показателей качества моделей и удерживает систему в точке пересечения их характеристик, тем самым поддерживая показатель качества объекта в экстремуме. В данном случае поиск в области времени переносится в область пространства, то есть определяются сразу две точки экстремальной характеристики.
На практике роль нелинейной части объекта в системе экстремального регулирования выполняют датчики. Это происходит в том случае, когда экстремальное показание датчика соответствует оптимальному прохождению регулируемого процесса. Тогда для смещения экстремальной характеристики достаточно на вход датчика подать постоянную во времени величину  .
.
.
Уравнения динамики системы, приведенной на рис. 5а, имеют следующий вид:
безынерционная часть объекта регулирования

первая модель

вторая модель

усилитель и серводвигатель

инерционная часть объекта регулирования

закон регулирования
Подставляя в закон регулирования значения и , получим

и , получим
В правильно настроенной схеме коэффициенты усиления ß1 и ß2 равны между собой, то есть ß1=ß2=ß. При этом условии закон регулирования примет вид:
Таким образом, рассматриваемая система является единственной из всех известных экстремальных систем без связи с возмущением  , в которой при правильной настройке параметров управляющее воздействие зависит только от ошибки системы. Система абсолютно инвариантна (нечувствительна) к возмущению (то есть к помехе). Изменением можно изменять коэффициент усиления системы [1].
, в которой при правильной настройке параметров управляющее воздействие зависит только от ошибки системы. Система абсолютно инвариантна (нечувствительна) к возмущению (то есть к помехе). Изменением можно изменять коэффициент усиления системы [1].
(то есть к помехе). Изменением можно изменять коэффициент усиления системы [1].
Недостаток дифференциальной системы: модель физического объекта существенно отличается по инерционности от реального объекта, поэтому могут возникнуть серьезные несоответствия в случае дрейфа экстремума, особенно горизонтального.
Достоинство: при реализации принципа управления дифференциальной системы с моделями экстремальная система может рассматриваться как линейная система.
Заключение
Предварительная оценка методов поиска экстремума такова: более приемлемым для инерционных объектов является метод шагового типа, однако для того чтобы это окончательно утверждать необходим более углубленный анализ.
Литература
1. В.И.Васильев. Экстремальные системы управления без поисковых колебаний.— К.: Техника, 1966.— 180с.
2. В.А. Олейников, Н.С. Зотов, А.М. Пришвин. Основы оптимального и экстремального управления.— М.: Высшая школа, 1969.— 296с.
3. Л.М. Либерзон, А.Б. Родов. Системы экстремального регулирования.— М: Энергия, 1965.— 160с.
4. Шкроб М.С., Вихрев В.Ф., Водоподготовка.— М, 1966.
5. А.А.Громогласов и др., Водоподготовка: процессы и аппараты.—М, 1990
6. Живилова Л.М., Максимов В.В. Автоматизация водоподготовительных установок и управление водно - химическим режимом ТЭС.— М, 1986
7. Деркасова В.Г., Карелин В.О. Потенциометрический анализ технологичных вод ТЭС и АЭС.— М, 1992
8. Герзон В.М. и др. Управление водоподготовительным оборудованием и установками.— М.:Энергоатомиздат, 1985
9. Руководство для операторов водоподготовки химического цеха Кураховской ТЭС/химцех Кураховской ТЭС
| Ссылки | Поиск | Индивидуальное задание |
| Магистры ДонНТУ | ДонНТУ | Автобиография | Библиотека |