The task of the controlling of the parallel manipulator is to find a method to actuate the six leg forces to properly position the mobile platform given a desired trajectory. For this problem, we are given a desired position and orientation of the mobile platform with respect to the fixed base plate. These desired values might change over time. For the platform’s model the six leg forces are the inputs into the plant while the outputs are the lengths and velocities of the six legs.
Traditional method for designing the controller for parallel manipulators requires manipulating difficult equations that modeled the physical components. Then, these equations have to be solved using complex numerical integration techniques. This can be avoided using special tools such as dynamic simulation software. To simulate mechanical parts it’s possible to use MATLAB/SimMechanics, and for simulating a regulator - Simulink.
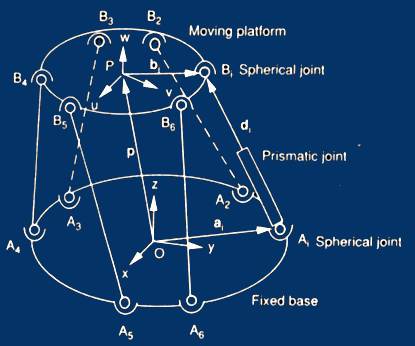
In the first the plant model is built using SimMechanics. The mechanical components of the manipulator compose of a top plate, a bottom plate, and six legs connecting the top plate to the bottom plate. Each leg contains two bodies connected together with a cylindrical joint. The upper body connects to the top mobile plate using a universal joint, and the lower body connects to the base plate using a second universal joint.
For imitation of the base the SimMechanics ground block is used. This block connects to the universal joint block. Connecting universal joint block to a body block we get the lower leg. Next, we add another body block to represent the upper leg. Then we use a cylindrical joint block to connect the lower leg to the upper leg. To move the legs, we use a joint actuator block from the Sensor & Actuators Library in SimMechanics. This joint actuator is used to control the translational degree of freedom of the cylindrical joint. With help of the joint sensor block we are able to measure the position and velocity. All elements of the model of a leg are united into one block, i.e. the subsystem is formed. Now it is possible to build mechanical model of the parallel manipulator in SimMechanics.
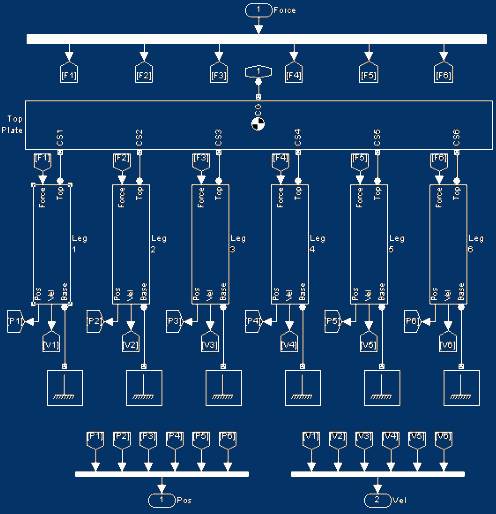
The control signal formed by a regulator, moves on demultiplexer which has six outputs. Signals from these outputs are input signals for joint actuator block of each leg. All six legs affect a mobile platform - block top plate. The each leg subsystem has two outputs signals: position and speed which are used as feedback for a regulator. Thus, we get the model of the parallel manipulator.
The basic goal of the controller is to specify the desired trajectory of the top plate in both position and orientation. This desired trajectory then is mapped to the corresponding trajectory in the legs using inverse kinematics. Finally, the controller forms master control for each leg to command the leg to follow the desired trajectory.
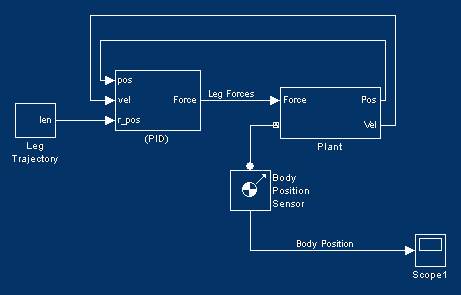
As a low level regulator the PID regulator is used. Its inputs are the current position, speed and desirable position of legs. Finally, the model of a control system and control object is put together. This system is represented in the following figure:
The parallel manipulators have advantages of higher stiffness, higher load capacity, and lower inertia to serial manipulators. The disadvantages of parallel manipulators are next: limited and rather small workspace and very complex mathematical description.
During the functioning of the parallel manipulator so-called «special positions» may take place. In such positions the links of the manipulator can intersect. This leads to the breakage of the device. Therefore, the control system of the manipulator should not only provide speed and overcorrection requirements, but also to avoid special positions.
There are various applications of the parallel manipulators such as flight simulator, handle vehicle maintenance positioning of satellite communication dishes and telescopes. Its can be used both in industry applications and for entertainment. It does without saying that studying of the parallel manipulators will be developed in future.
References
up
| 1. |
Lung-Wen Tsai. Robot Analysis: The mechanics of serial and parallel manipulators.– New York: John
Wiley&Sons Inc., 1999. – 505С. |
| 2. |
"Geometric Analysis of Parallel Mechanisms"; Ilian Bonev.
Internet-resource . |
| 3. |
"Robust Adaptive Control of a Hexaglide Type Parallel Manipulator"; John Phil Kim, Sung-Gaun Kim, Jeha Ryu.
Internet-resource . |
| 4. |
Скляренко Е.Г. "Оптимизация конструкции механизма с параллельными кинематическими связями и шестью степенями свободы." |
| 5. |
"Simulink 4. Специальный справочник" В.Дьяконов- Санкт-Петербург, 2002. – 517С. |
| 6. |
http://www.parallemic.org |
| 7. |
http://www.mathworks.com |