Довгань Александр Юрьевич
Тема магистерской работы:
"Разработка и исследование энергосберегающего преобразователя для управления автоматизированным электроприводом шахтной подъемной установки"
Содержание магистерской работы
Введение
Современное горное предприятие – это сложнейший взаимосвязанный комплекс различных производственных процессов, функционирование которых основано на использовании высокопроизводительных автоматизированных машин. По существу автоматическим управлением в той или иной степени в настоящее время охвачены все основные и вспомогательные процессы: добыча, транспортировка и подъем полезного ископаемого, проведение подготовительных выработок, проветривание, водоотлив. Причем процессы водоотлива, проветривания и подъем могут управляться автоматически.
1. Общие сведения
1.1. Цель работы – уменьшение потребления реактивной мощности и повышение коэффициента мощности электропривода шахтной подъемной установки.Задачи работы – в соответствии с поставленной целью проанализировать работу преобразователя для двигателя постоянного тока, выделить преимущества и недостатки исходной системы управления двигателем, разработать новую систему на базе исходной учитывая ее преимущества и устранив ее недостатки.
1.2. Актуальность темы
Совершенствование технологических процессов и внедрение новых, более эффективных машин становится невозможным без использования систем автоматического управления и современных средств вычислительной техники.
В настоящее время большое внимание уделяется энергосберегающим технологиям, так как задача энергетической независимости Украины от стран, владеющих энергоресурсами, еще не решена. Таким образом, улучшая показатели энергопотребления можно уменьшить эту зависимость. В магистерской работе я решаю проблему повышенного энергопотребления шахтной подъемной установкой с двигателем постоянного тока, что в свою очередь существенно влияет на энергопотребление всей шахты.
1.3. Научная новизна
Для обоснования научной новизны анализа существующих технических решений в области совершенствования систем управления электроприводом.
1.3.1. Система управляемый выпрямитель – двигатель (УВ—Д).
Регулирование постоянного напряжения осуществляется регулированием угла включения вентилей в проводящей части периода переменного напряжения и имеет свои особенности.
При реализации электропривода рудничной подъемной установки по системе УВ–Д применяют следующие две схемы:
- с двумя силовыми тиристорными преобразователями, каждый из которых пропускает якорный ток двигателя взаимно противоположного направления (знака);
- с одним силовым тиристорным преобразователем и реверсом в якорной цепи или реверсированием потока возбуждения.
В схеме с двумя силовыми тиристорными преобразователями последние могут быть соединены по перекрестной или встречно-параллельной схеме. Наиболее экономичной и совершенной схемой является встречно- параллельная, так как при перекрестной схеме используется трехобмоточный трансформатор (мощность на 20% больше). Это имеет существенное значение, особенно при больших мощностях установленного электрооборудования.
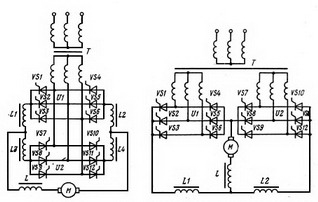
Рисунок 1 – Включение преобразователя встречно-параллельное и перекрестное.
Управление преобразователями в схеме встречно-параллельного включения силовых тиристорных преобразователей может быть совместное или раздельное. При совместном управлении один управляемый преобразователь работает в выпрямительном режиме, а другой подготовлен к инверторному режиму работы. При раздельном управлении преобразователями сигналы управления подаются раздельно. При таком управлении один из преобразователей всегда заперт и сигналы управления на него не подаются. Это полностью исключает возможность появления уравнительных токов, и отпадает необходимость в уравнительных дросселях, а также полностью используется габаритная мощность трансформатора.
Режим работы привода с раздельным управлением изменяется путем прекращения подачи сигналов управления на преобразователь, например, работающий в выпрямительном режиме, и после исчезновения тока в якорной цепи подается управляющий сигнал на второй преобразователь с углом регулирования α>π/2, обеспечивающий его работу в инверторном режиме.
Системы электропривода с реверсированием поля имеют меньший объем электрооборудования по сравнению со встречно-параллельной схемой, но имеют худшие динамические показатели, так как увеличивается время реверсирования из-за инерционности обмотки.
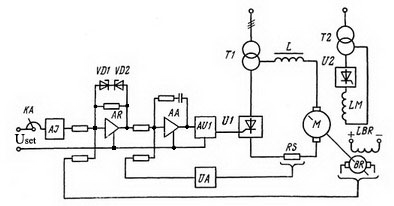
Рисунок 2 – Принципиальная схема электропривода подъемной машины по схеме УВ–Д.
Принцип работы схемы приведен тут.
Коэффициент полезного действия тиристорного выпрямителя определяется произведением КПД трансформатора и вентилей. Коэффициент полезного действия трансформатора средней и большой мощности при номинальное нагрузке примерно равен 0,95—0,98. Коэффициент полезного действия тиристорного выпрямителя определяется прямым падением напряжения на нем, которое для одного тиристора составляет всего 1—1,2 В, поэтому общий КПД выпрямителя при номинальной нагрузке для мощности 50—100 кВт составляет 0,9—0,92. С увеличением мощности КПД выпрямителя оказывается еще выше. Коэффициент мощности тиристорного выпрямителя определяется по формуле:

откуда видно, что с увеличением угла включения тиристоров резко падает коэффициент мощности, что является существенным недостатком схем с тиристорным выпрямителем. Вследствие падения коэффициента мощности подъемная установка потребляет из сети реактивную мощность.
1.3.2. Широтно-импульсное регулирование
Регулирование напряжения на якоре двигателя можно осуществить импульсным методом, когда двигатель периодически подключается к источнику питания и отключается от него. В период отключения электропривод продолжает работать за счет запасенной кинетической и электромагнитной энергии.
Схема включения двигателя постоянного тока независимого возбуждения при импульсном регулировании напряжения показана на рис. 3, а. Диод V, шунтирующий якорь двигателя, создает цепь для протекания тока якоря под действием ЭДС самоиндукции, возникающей в индуктивности обмотки якоря в период разомкнутого состояния ключа К. Это создает условия для непрерывного протекания тока якоря, что существенно уменьшает его пульсации и устраняет коммутационные перенапряжения на ключе К и обмотке якоря.
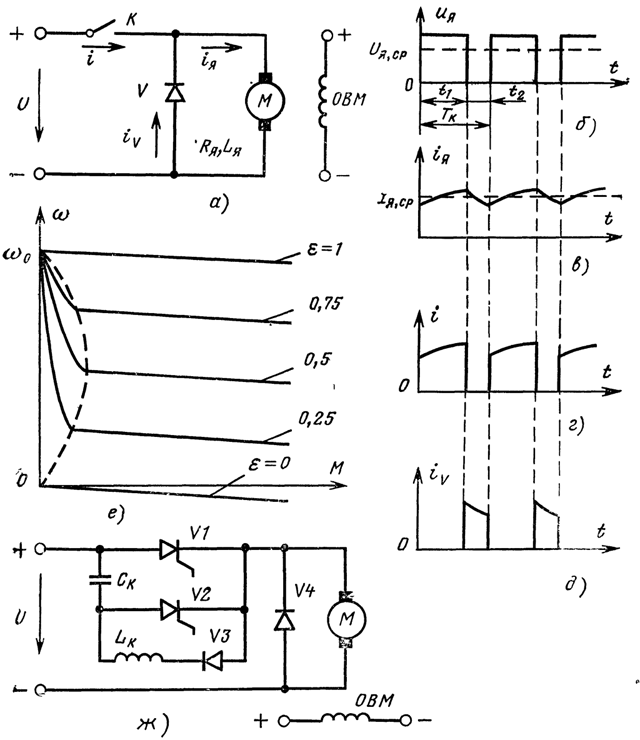
Рисунок 3 – Схема включения двигателя при импульсном регулировании напряжения якоря двигателя (а), диаграммы напряжения (б), токов (в, г, д) и механические характеристики (е) при ШИР и схема тиристорного регулятора.
Из всех известных видов импульсного регулирования для регулирования угловой скорости преимущественное применение нашло широтно-импульсное регулирование напряжения (ШИР), при котором период коммутации Тк (частота) остается постоянным, а изменяется время tx замкнутого состояния ключа К — скважность ε = t1/Tk.
Среднее значение напряжения на якоре при ШИР равно:
Uя.ср = εU
где U — неизменное напряжение сети. Диаграммы токов показаны на рис. 3, в – д. Уравнение механической характеристики двигателя для средних значений угловой скорости и момента имеет вид:

откуда следует, что угловую скорость можно регулировать в широких пределах, изменяя ε жесткость механических характеристик при регулировании угловой скорости постоянна и равна жесткости естественной характеристики. Это является достоинством данного способа регулирования угловой скорости. Однако высокая жесткость свойственна характеристикам лишь в области непрерывного тока якоря. Если же в период выключенного состояния ключа К ток якоря успевает снизиться до нуля и в кривой тока содержится пауза, то имеет место режим прерывистых токов, где жесткость механических характеристик (рис. 3, е) резко падает. Основным средством сужения зоны прерывистых токов, уменьшения пульсаций тока якоря (момента) и угловой скорости относительно среднего значения и, следовательно, дополнительных потерь в обмотках якоря является увеличение частоты коммутации ключа. Обычно частота коммутации составляет 800—1200 Гц. Увеличению ее препятствует рост потерь в ключе (транзисторе, тиристоре) и его предельные динамические параметры.
Для реализации рассмотренного способа регулирования напряжения могут быть использованы либо транзисторы, работающие в режиме ключа, либо тиристоры.
Схема электропривода с тиристорным ключом приведена на рис.3, ж. Этот ключ работает так же, как и в схеме на рис. 3, г, но в данном случае нет необходимости в дополнительном источнике питания для предварительного заряда коммутирующего конденсатора Сk, который предварительно заряжается от сети через коммутирующий тиристор V2 и якорь двигателя. При включении тиристора VI происходит подача напряжения на якорь двигателя, выключение тиристора V2 и колебательный перезаряд конденсатора Ск через реактор LK, тиристор VI и диод V3.
При включении двигателя по схемам рис. 3, а, ж он может работать только в двигательном режиме и режиме динамического торможения (при активном характере момента), а реверс двигателя возможен только посредством реверса тока возбуждения. Но существует много схем ШИР напряжения (угловой скорости двигателя), позволяющих двигателю работать во всех режимах (при питании от сети постоянного тока или от аккумуляторов) и осуществлять бесконтактное его реверсирование по цепи якоря.
В моей работе базовой системой управления я принял УВ–Д. Система УВ-Д с тиристорным преобразователем имеет существенный недостаток – изменение коэффициента мощности при регулировании скорости. Вследствие изменения cosф изменяется потребление реактивной мощности двигателем постоянного тока, мощность которого измеряется тысячами кВт. Таким образом, система УВ–Д требует усовершенствования, которое можно осуществить путем изменения элементной базы и изменения принципа управления выпрямителем, то есть объединив обе рассмотренные выше системы.
Выпрямитель собирается из IGBT транзисторов по схеме Ларионова. Такой выпрямитель называется «активным». Принцип управления – широтно-импульсная модуляция (описано в пункте 1.3.2). Данный метод управления выпрямителем позволяет практически исключить потребление установкой реактивной мощности, установить уровень cosφ около 1, и таким образом повысить КПД установки.
2. Обзорная информация:
Проанализировав состояние вопроса на данный момент на кафедре, в Украине и в мире, я пришел к выводу, что изучаемая мною тема достаточно новая и актуальная для нашего университета и в мире в целом. В следующем перечне приведены статьи, посвященные способам управления «активным» выпрямителем.
- Применение активного выпрямителя в качестве энергосберегающего элемента в электроприводе.
- Сравнительный анализ векторной и традиционной широтно-импульсной модуляции
- Использование метода векторной ШИМ в многоуровневом автономном инверторе напряжения
- Создание тиристорного частотного преобразователя на IGBT-модулях вынесенной подачи угольного очистного комбайна.
- Разработка серии силовых электронных преобразователей для регулируемых электроприводов на современной элементной базе.
3. Заключительная информация
3.1. Обзор имеющихся и планируемых результатов
Задача по проектированию схемы управления приводом ШПУ выполняется в три этапа:
- разработка структурной схемы;
- разработка функциональной схемы;
- разработка принципиальной схемы.
Рисунок 4. – Структурная схема автоматизированного привода подъемной установки по системе УВ–Д.
На рисунке 4 представлена структурная схема автоматизированного привода ШПУ по системе УВ-Д. На схеме приняты следующие обозначения: ЗУ – задающее устройство, РС – регулятор скорости; РТ – регулятор тока; СШИУ – система широтно-импульсного управления; ДС – датчик скорости (тахогенератор); ДТ – датчик тока (трансформатор тока); Т – силовой трансформатор; П – преобразователь напряжения; Д – двигатель. Сплошными линиями показаны электрические связи, пунктирными – механические.
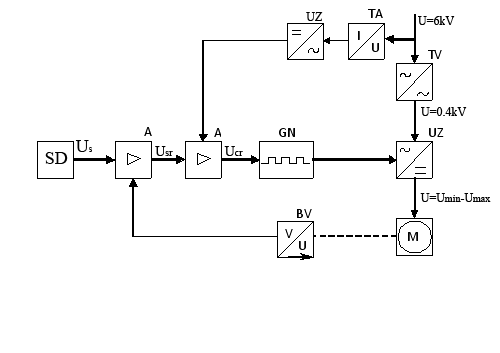
Рисунок 5. – Функциональная схема автоматизированного привода ШПУ по системе УВ-Д.
Принцип действия данной схемы основан на принципе действия системы УВ-Д. В качестве датчика тока использовано два измерительных трансформатора тока, которые выдают сигнал о загруженности скипа в регулятор тока. Таким образом осуществляется корректировка управляющего напряжения для вентилей и скорости сосуда. Обратная связь по скорости осуществляется при помощи тахогенератора постоянного тока. Отличие данной схемы от УВ-Д с тиристорным выпрямителем состоит в наличии системы широтно-импульсного управления и активного выпрямителя, который состоит не из 12, а из 6 ключей. Управление таким выпрямителем получается более эффективным за счет отсутствия сдвига напряжения по фазе. Коэффициент мощности такого выпрямителя можно поддерживать на уровне единицы. Потребление установкой из сети реактивной мощности можно снизить до минимума, что являлось существенным недостатком тиристорного выпрямителя. Таким образом, повышая коэффициент мощности можно повысить КПД установки в целом.
Рисунок 6 – Принципиальная схема привода шахтной подъемной установки.
На рисунке 6 приведена разработанная мною принципиальная схема привода шахтной подъемной установки. За основу взята схема, предложенная в пункте 1.3.1 (рисунок 2).
Принципиальная схема привода строится на основании структурной и функциональной схем, приведенных выше. Принципиальная схема состоит из силовой части и схемы управления. Силовая часть состоит из силового трансформатора, преобразователя напряжения и двигателя. Трансформатор выбирается в зависимости от мощности двигателя. Преобразователь – т.н. активный выпрямитель – собирается по схеме Ларионова из IGBT – транзисторов и сглаживающих реакторов в каждой фазе. Транзисторы выбираются из расчета половины номинального тока пропускания (номинального тока двигателя) с запасом по термической стойкости, реакторы выбираются по номинальному току двигателя. Дополнительно в цепь якоря включается реактор для сглаживания бросков тока в якоре.
На момент создания сайта я решил задачу разработки принципиальной схемы привода ШПУ. Планируемые результаты к защите магистерской работы:
- разработка принципиальной схемы системы широтно-импульсного управления;
- моделирование процесса пуска двигателя постоянного тока с тиристорным и активным выпрямителем и получение графиков изменения коэффициента мощности и реактивной мощности во время пуска ДПТ.
3.2. Выводы.
В автореферате были сформулированы цели и задачи магистерской работы, обоснована актуальность темы. Для обоснования научной новизны темы магистерской работы был проведен анализ существующих решений в области автоматизации и управления приводом постоянного тока.
В результате обзора существующих решений по данной теме на кафедре, в Украине и в мире был сделан вывод об актуальности темы и о том, что она до конца не изучена.
В разделе 3 представлены полученные на данный момент результаты и сформулированы задачи, которые надо решить до защиты магистерской работы.
3.3. Перечень использованной литературы.
- Правицкий Н.К. Рудничные подъёмные установки - М.- 1963. – 416 с.
- Малиновский А. К. Автоматизированный электропривод машин и установок шахт и рудников. – М.: Недра, 1987. – 278 с.
- Чиликин М.Г., Сандлер А.С. Общий курс электропривода. – М.: Энергоатомиздат, 1981. 576.
- Герман-Галкин Р.Б. Силовая электроника. – С.-Пб., 2002г.
- Гаврилов П.Д., Гимельштейн Л.Я., Медведев А.Е. Автоматизация производственных процессов. Учебник для вузов. М.: Недра, 1985. – 215с.
- Батицкий В.А., Куроедов В.И., Рыжков А.А. Автоматизация производственных процессов и АСУТП в горной промышленности. – М.: Недра, 1991. – 303с.
- Католиков В.Е., Динкель А.Д., Седунин А.М. Автоматизированный электропривод подъёмных установок глубоких шахт.- М.: Недра, 1983.- 270 с.
- Тиристорный электропривод рудничного подъёма / Динкель А.Д., Католиков В.Е., Петренко В.И., Ковалёв А.М.- М.: Недра, 1977.- 312 с.
- Лебедев Е.Д., Неймарк В.Е. и др. Управление вентильными электроприводами постоянного тока.- М.: Энергия, 1970.- 200 с. 10.