Довгань Олександр Юрійович
Тема магістерської роботы:
"Розробка і дослідження енергоощадного перетворювача для управління автоматизованим електроприводом шахтної підйомної установки"
Зміст магістерської роботи
Вступ
Сучасне гірниче підприємство - це складний взаємопов'язаний комплекс різних виробничих процесів, функціонування яких засноване на використанні високопродуктивних автоматизованих машин. По суті автоматичним управлінням в тому або іншому ступені в даний час охоплені всі основні і допоміжні процеси: видобуток, транспортування і підйом корисної копалини, проведення підготовчих виробок, провітрювання, водовідлив. Причому процеси водовідливу, провітрювання і підйом можуть керуватись автоматично.
1. Загальні відомості
1.1. Мета роботи - зменшення споживання реактивної потужності і підвищення коефіцієнта потужності електроприводу шахтної підйомної установки.Завдання роботи - відповідно до поставленої мети проаналізувати роботу перетворювача для двигуна постійного струму, виділити переваги і недоліки початкової системи управління двигуном, розробити нову систему на базі початкової, враховуючи її переваги і усунувши її недоліки.
1.2. Актуальність теми
Вдосконалення технологічних процесів і впровадження нових, ефективніших машин стає неможливим без використання систем автоматичного управління і сучасних засобів обчислювальної техніки.
В даний час велика увага приділяється енергоощадним технологіям, оскільки задача енергетичної незалежності України від країн, що володіють енергоресурсами, ще не вирішена. Таким чином, покращуючи показники енергоспоживання можна зменшити цю залежність.
У магістерській роботі я вирішую проблему підвищеного енергоспоживання шахтною підйомною установкою з двигуном постійного струму, що у свою чергу істотно впливає на енергоспоживання всієї шахти.
1.3. Наукова новизна
Для доведення наукової новизни теми проведемо аналіз існуючих технічних рішень в області вдосконалення систем управління електроприводом.
1.3.1. Система керований випрямляч - двигун (КВ-Д).
Регулювання постійної напруги здійснюється регулюванням кута включення вентилів в провідній частині періоду змінної напруги і має свої особливості.
При реалізації електроприводу шахтної підйомної установки за системою УВ-Д застосовують наступні дві схеми:
- із двома силовими тиристорними перетворювачами, кожний з яких пропускає якірний струм двигуна взаємно протилежного напряму (знаку);
- з одним силовим тиристорним перетворювачем і реверсом в якірному ланцюзі або реверсуванням потоку збудження.
У схемі з двома силовими тиристорними перетворювачами останні можуть бути сполучені по перехресній або зустрічно-паралельній схемі. Найбільш економічною і довершеною схемою є зустрічно-паралельна, оскільки при перехресній схемі використовується триобмотковий трансформатор (потужність на 20% більша). Це має істотне значення, особливо при великих потужностях встановленого електроустаткування.
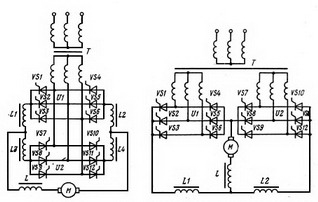
Рисунок 1 - Включення перетворювача зустрічно-паралельне і перехресне.
Управління перетворювачами в схемі зустрічно-паралельного включення силових тиристорних перетворювачів може бути сумісне або роздільне. При сумісному управлінні один керований перетворювач працює у випрямному режимі, а інший підготовлений до інверторного режиму роботи. При роздільному управлінні перетворювачами сигнали управління подаються роздільно. При такому управлінні один з перетворювачів завжди замкнутий і сигнали управління на нього не подаються. Це повністю виключає можливість появи зрівняльних струмів, і відпадає необхідність в зрівняльних дроселях, а також повністю використовується габаритна потужність трансформатора.
Режим роботи приводу з роздільним управлінням змінюється шляхом припинення подачі сигналів управління на перетворювач, наприклад, працює у випрямному режимі, і після зникнення струму в якірному ланцюзі подається сигнал, що управляє, на другий перетворювач з кутом регулювання ?>?/2, що забезпечує його роботу в інверторному режимі.
Системи електроприводу з реверсуванням поля мають менший об'єм електроустаткування в порівнянні із зустрічно-паралельною схемою, але мають гірші динамічні показники, оскільки збільшується час реверсування із-за інерційності обмотки.
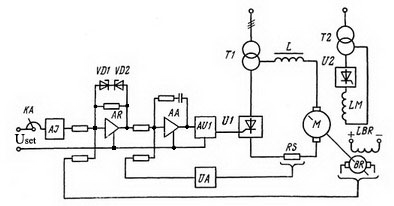
Рисунок 2 - Принципова схема електроприводу підйомної машини за схемою КВ-Д.
Принцип роботи схеми приведений тут.
Коефіцієнт корисної дії тиристорного випрямляча визначається добутком ККД трансформатора і вентилів. Коефіцієнт корисної дії трансформатора середньої і великої потужності при номінальному навантаженні приблизно рівний 0,95-0,98. Коефіцієнт корисної дії тиристорного випрямляча визначається прямим падінням напруги на нім, яке для одного тиристора складає всього 1-1,2 В, тому загальний ККД випрямляча при номінальному навантаженні для потужності 50-100 кВт складає 0,9-0,92. Із збільшенням потужності ККД випрямляча виявляється ще вищим. Коефіцієнт потужності випрямляча тиристора визначається за формулою:

звідки видно, що із збільшенням кута включення тиристорів різко падає коефіцієнт потужності, що є істотним недоліком схем з випрямлячем тиристора. Унаслідок падіння коефіцієнта потужності підйомна установка споживає з мережі реактивну потужність.
1.3.2. Широтно-імпульсне регулювання
Регулювання напруги на якорі двигуна можна здійснити імпульсним методом, коли двигун періодично підключається до джерела живлення і відключається від нього. В період відключення електропривод продовжує працювати за рахунок запасеної кінетичної і електромагнітної енергії.
Схема включення двигуна постійного струму незалежного збудження при імпульсному регулюванні напруги показана на рис. 3, а. Діод V, що шунтує якір двигуна, створює ланцюг для протікання струму якоря під дією ЕДС самоіндукції, що виникає в індуктивності обмотки якоря в період розімкненого стану ключа К. Це створює умови для безперервного протікання струму якоря, що істотно зменшує його пульсації і усуває комутаційні перенапруження на ключі К і обмотці якоря.
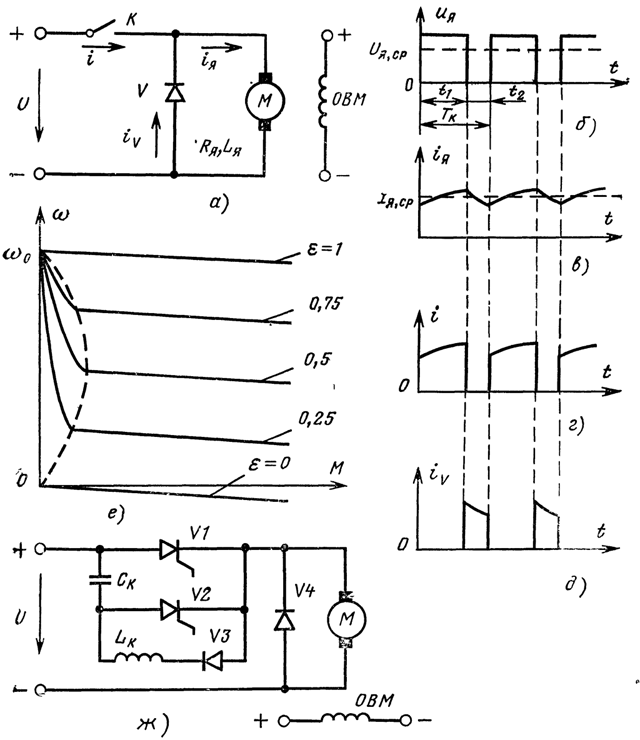
Рисунок 3 - Схема включення двигуна при імпульсному регулюванні напруги на якорі двигуна (а), діаграми напруги (б), струмів (в, г, д) і механічні характеристики (е) при ШІР і схемі регулятора тиристора.
Із всіх відомих видів імпульсного регулювання для регулювання кутової швидкості переважне застосування знайшло широко-імпульсне регулювання напруги (ШИР), при якій період комутації Тк (частота) залишається постійним, а змінюється час tx замкнутого стану ключа К – шпаруватість ε=t1/Tk .
Середнє значення напруги на якорі при ШІР дорівнює:
Uя.ср = εU
де U - незмінна напруга мережі. Діаграми струмів показані на мал. 3, в - д. Рівняння механічної характеристики двигуна для середніх значень кутової швидкості і моменту має вигляд:

звідки витікає, що кутову швидкість можна регулювати в широких межах, змінюючи ??, а жорсткість механічних характеристик при регулюванні кутової швидкості постійна і рівна жорсткості природної характеристики. Це є гідністю даного способу регулювання кутової швидкості. Проте висока жорсткість властива характеристикам лише в області безперервного струму якоря. Якщо ж в період вимкненого стану ключа К струм якоря встигає знизитися до нуля і в кривій струму міститься пауза, то має місце режим переривистих струмів, де жорсткість механічних характеристик (рис. 3, е) різко падає. Основним засобом звуження зони переривистих струмів, зменшення пульсацій струму якоря (моменту) і кутової швидкості щодо середнього значення і, отже, додаткових втрат в обмотках якоря є збільшення частоти комутації ключа. Зазвичай частота комутації складає 800-1200 Гц. Збільшенню її перешкоджає зростання втрат в ключі (транзисторі, тиристорі) і його граничні динамічні параметри.
Для реалізації розглянутого засобу регулювання напруги можуть бути використані або транзистори, що працюють в режимі ключа, або тиристори.
Схема електроприводу з ключем тиристора приведена на рис.3, ж. Цей ключ працює так само, як і в схемі на мал. 3, г, але в даному випадку немає необхідності в додатковому джерелі живлення для попереднього заряду комутуючого конденсатора Сk, який заздалегідь заряджає від мережі через комутуючий тиристор V2 і якір двигуна. При включенні тиристора VI відбувається подача напруги на якір двигуна, виключення тиристора V2 і коливальний перезаряд конденсатора Ск через реактор LK, тиристор VI і діод V3..
При включенні двигуна по схемах рис. 3, а, ж він може працювати тільки в руховому режимі і режимі динамічного гальмування (при активному характері моменту), а реверс двигуна можливий тільки за допомогою реверсу струму збудження. Але існує багато схем ШІР напруги (кутовій швидкості двигуна), що дозволяють двигуну працювати у всіх режимах (при живленні від мережі постійного струму або від акумуляторів) і здійснювати безконтактне його реверсування по ланцюгу якоря.
Базовою системою управління я прийняв КВ-Д. Система КВ-Д з тиристорним перетворювачем має також істотний недолік - зміна коефіцієнта потужності при регулюванні швидкості. Унаслідок зміни cosф змінюється споживання реактивної потужності двигуном постійного струму, потужність якого вимірюється тисячами кВт. Таким чином, система КВ-Д вимагає удосконалення, яке можна здійснити шляхом зміни елементної бази і зміни принципу управління випрямлячем, тобто об'єднавши обидві розглянуті вище системи.
Випрямляч збирається з IGBT транзисторів за схемою Ларіонова. Такий випрямляч називається «активним». Принцип управління - широко-імпульсна модуляція (описано в пункті 1.3.2). Даний метод управління випрямлячем дозволяє практично виключити споживання установкою реактивної потужності, встановити рівень cosф близько 1, і таким чином підвищити ККД установки.
2. Оглядова інформація:
Проаналізувавши стан питання на даний момент на кафедрі, в Україні і в світі, я прийшов до висновку, що тема, що вивчається мною, достатньо нова і актуальна для нашого університету і в світі в цілому. У наступному переліку приведені статті, присвячені способам управління «активним» випрямлячем.
- Применение активного выпрямителя в качестве энергосберегающего элемента в электроприводе.
- Сравнительный анализ векторной и традиционной широтно-импульсной модуляции
- Использование метода векторной ШИМ в многоуровневом автономном инверторе напряжения
- Создание тиристорного частотного преобразователяна IGBT-модулях вынесенной подачи угольного очистного комбайна.
- Разработка серии силовых электронных преобразователей для регулируемых электроприводов на современной элементной базе.
3. Завершальна інформація
3.1. Огляд наявних і планованих результатів
Завдання по проектуванню схеми управління приводом ШПУ виконується в три етапи:
- розробка структурної схеми;
- розробка функціональної схеми;
- розробка принципової схеми.
Рисунок 4– Структурна схема автоматизованого приводу ШПУ за системою КВ-Д.
На рисунку 4 представлена структурна схема автоматизованого приводу ШПУ за системою КВ-Д. На схемі прийняті наступні позначення: ЗУ - задаючий пристрій, РС - регулятор швидкості; РТ - регулятор струму; СШИУ - система широко-імпульсного управління; ДС - датчик швидкості (тахогенератор); ДТ - датчик струму (трансформатор струму); Т - силовий трансформатор; П - перетворювач напруги; Д - двигун. Суцільними лініями показані електричні зв'язки, пунктирними - механічні..
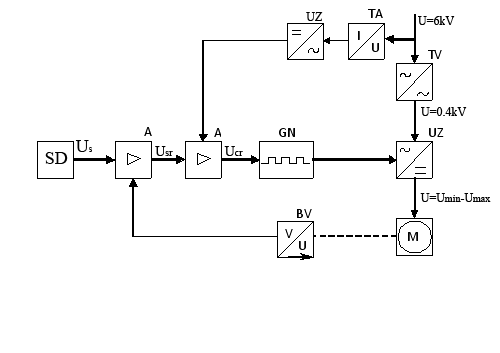
Рисунок 5. - Функціональна схема автоматизованого приводу ШПУ за системою КВ-Д.
Принцип дії даної схеми заснований на принципі дії системи КВ-Д. Як датчик струму використано два вимірювальні трансформатори струму, які видають сигнал про завантаженість скіпа в регулятор струму. Таким чином здійснюється коректування напруги, що управляє, для вентилів і швидкості судини. Зворотний зв'язок за швидкістю здійснюється за допомогою тахогенератора постійного струму. Відмінність даної схеми від КВ-Д з тиристорним випрямлячем полягає в наявності системи широтно-імпульсного управління і активного випрямляча, який складається не з 12, а з 6 ключів. Управління таким випрямлячем виходить ефективнішим за рахунок відсутності зсуву напруги по фазі. Коефіцієнт потужності такого випрямляча можна підтримувати на рівні одиниці. Споживання установкою з мережі реактивної потужності можна понизити до мінімуму, що було істотним недоліком випрямляча тиристора. Таким чином, підвищуючи коефіцієнт потужності можна підвищити ККД установки в цілому.
Рисунок 6 - Принципова схема приводу шахтної підйомної установки.
На малюнку 6 приведена розроблена мною принципова схема приводу шахтної підйомної установки. За основу узята схема, запропонована в пункті 1.3.1 (рисунок 2).
Принципова схема приводу будується на підставі структурної і функціональної схем, приведених вище. Принципова схема складається з силової частини і схеми управління. Силова частина складається з силового трансформатора, перетворювача напруги і двигуна. Трансформатор вибирається залежно від потужності двигуна. Перетворювач - т.з. активний випрямляч - збирається по схемі Ларіонова з IGBT - транзисторів і згладжуючих реакторів в кожній фазі. Транзистори вибираються з розрахунку половини номінального струму пропускання (номінального струму двигуна) із запасом по термічній стійкості, реактори вибираються по номінальному струму двигуна. Додатково в ланцюг якоря включається реактор для згладжування кидків струму в якорі.
На момент створення сайту я вирішив задачу розробки принципової схеми приводу ШПУ. Плановані результати до захисту магістерської роботи:
- розробка принципової схеми системи широтно-імпульсного управління;
- моделювання процесу пуску двигуна постійного струму з тиристорним випрямлячем і активним і отримання графіків зміни коефіцієнта потужності і реактивної потужності під час пуску ДПТ.
3.2. Висновки.
У авторефераті були сформульовані цілі і завдання магістерської роботи, обгрунтована актуальність теми. Для обгрунтування наукової новизни теми магістерської роботи був проведений аналіз існуючих рішень в області автоматизації і управління приводом постійного струму.
В результаті огляду існуючих рішень по даній темі на кафедрі, в Україні і в світі був зроблений висновок про актуальність теми і про те, що вона до кінця не вивчена.
У розділі 3 представлені отримані на даний момент результати і сформульовані завдання, які треба вирішити до захисту магістерської роботи.
3.3. Перелік посилань.
- Правицкий Н.К. Рудничные подъёмные установки - М.- 1963. – 416 с.
- Малиновский А. К. Автоматизированный электропривод машин и установок шахт и рудников. – М.: Недра, 1987. – 278 с.
- Чиликин М.Г., Сандлер А.С. Общий курс электропривода. – М.: Энергоатомиздат, 1981. 576.
- Герман-Галкин Р.Б. Силовая электроника. – С.-Пб., 2002г.
- Гаврилов П.Д., Гимельштейн Л.Я., Медведев А.Е. Автоматизация производственных процессов. Учебник для вузов. М.: Недра, 1985. – 215с.
- Батицкий В.А., Куроедов В.И., Рыжков А.А. Автоматизация производственных процессов и АСУТП в горной промышленности. – М.: Недра, 1991. – 303с.
- Католиков В.Е., Динкель А.Д., Седунин А.М. Автоматизированный электропривод подъёмных установок глубоких шахт.- М.: Недра, 1983.- 270 с.
- Тиристорный электропривод рудничного подъёма / Динкель А.Д., Католиков В.Е., Петренко В.И., Ковалёв А.М.- М.: Недра, 1977.- 312 с.
- Лебедев Е.Д., Неймарк В.Е. и др. Управление вентильными электроприводами постоянного тока.- М.: Энергия, 1970.- 200 с. 10.