Зміст
Вступ
1.Загальна конфігурація мережі
1.1 Робоча станція мережі2. Програмне та конструктивне забезпечення робочої станції мережі
1.2 Головна станція мережі
1.3 Структурна схема мережі
2.1 Протокол фізичного рівня3. Програмне забезпечення головної станції мережі
2.1.1 Протокол RS-485і2.2 Протокол канального рівня
2.1.2 Реалізація протокола на RTU-188
2.1.3 Налаштування конвертера ADAM-4510
2.2.1 ASCII - протокол
2.2.2 Протокол канального рівня
3.1 Огляд SCAD-систем на прикладі Advantech Studio 5.1Висновок
3.2 Встановлення драйвера ASCII протокола
3.3Оголошення змінних
3.4 Налаштування протоколу
3.5 Використання модуля Math
3.6 Розміщення та ініціалізація компонент робочого екрана
Список літератури
Вступ
Метою научно-дослідницької роботи є розробка системи контроля інформації у промисловому середовищі. Ця система повинна складатися з підсистем передачі та прийому (що фактично представляють собою мережу), а також підсистеми візуалізації, що дозволяє оператору спостерігати за станом бажаних об'єктів системи у реальному часі. Така автоматизація дозволяє:
- Звільнити людину від необхідності самостійно доглядати за усіма (часто віддаленими один від одного чи важкодоступними) об'єктами у промисловому середовищі
- Підвищити швидкість виявлення небезпечних, потенційно небезпечних та небажаних факторів виробництва
- Покращити контроль за виробництвом
- Підвищити безпеку
Цю научно-дослідницьку роботу варто розглядати разом зі вказаною у (СДЕЛАТЬ ССЫЛКОЙ)Списку літературі (1), бо вони фактично присвячені розробці однієї функціональної системи "Збора та контроля". У подальшому, коли мова йдеться про систему в сукупності, для скорочення вона названа Система Реального Часу (СРЧ).
1. Загальна конфігурація мережі
1.1 Робоча станція мережі
СРЧ (та мережа зокрема) складається з декількох складових частин, кожна з котрих є необхідною для реалізації власної функції. Загальна структурна схема мережі наведена на рисунку 1.3. Розглянемо детальніше головні блоки цієї схеми.
Робоча станція мережі - це апаратний комплекс, що складається з модуля RTU-188 (процесор, таймер, оперативна пам'ять, СОМ-порт, порти ввода-вивода), аналогових та цифрових датчиків, жидкокристалічного дисплея. У рамках НІРС розглядається одна робоча станція, але на наступному етапі проектування їх кількість буде від 2 до 31. Кожна робоча станція може мати власну кількість та тип датчиків, але, як станції мережі, вони ідентичні. Робоча станція збирає та обробляє інформацію з датчиків та надсилає її до головної станції мережі. Інформація з аналогових та цифрових датчиків надсилається на початку роботи, а потім за зміною стану, таким чином на робочому вікні головної станції мережі завжди відображається поточний стан усіх датчиків. У даному проекті робоча станція сама приймає рішення про надсилання інформації до головної станції мережі. Коли кількість робочих станцій буде 2 та більше, функції арбітражу та дозволу буде виконувати головна станція мережі у зв'язку з особливостями протоколу RS-485, що не дозволяють вести передачу двом та більше станціям водночас. Головна станція повинна буде по черзі давати дозвіл на передачу робочим станціям. Звичайно, у такому разі буде виникати деяке відставання інформування про подію у системі від реального часу її виникнення, отже необхідно враховувати потреби конкретної ситуації у кожному окремому випадку. Більш докладно робота, програмне забезпечення та інша інформація про робочу станцію мережі викладена у пункті 2.
1.2 Головна станція мережі
Головна станція мережі - це персональна ЕВМ, тобто звичайний комп'ютер, з підтримкою сучасних операційних систем, який має СОМ-порт. Параметри цього порта повинні бути налаштовані однаковим чином з усіма іншими станціями мережі. Головна робоча станція має спеціальне програмне забезпечення, розроблене на SCAD-системі, що дозволяє спостерігати за інформацією та зберігати мультизадачність сучасних операційних систем. Більш докладно робота, програмне забезпечення та інша інформація про головну станцію мережі викладена у пункті 3.
1.3 Структурна схема мережі
Рисунок 1 - Структурна схема мережі
Як видно зі структурної схеми, апаратний комплекс представляє собою СРЧ, компоненти якої взаємодіють між собою та з людиною. Оператор - це користувач персонального комп'ютера зі SCAD-системою, він має інформацію про стан усіх пристроїв, що поєднані до мережі. Працівник - це представник робочого персонала, який може спостерігати за станом ближнього пристрою, що обслуговується RTU-188 за допомогою ЖК-дисплея. (Програмне забезпечення для ЖКІ наведено у (СДЕЛАТЬ ССЫЛКОЙ)Літературі (1)). Як було зазначено вище, у рамках НДРС розглядається лише одна робоча станція. Пунктиром позначені додаткові робочі станції, підтримка яких буде реалізовуватися у майбутньому. Оскільки головна станція мережі це комп'ютер, який зазвичай не має СОМ-порта з підтримкою фізичного інтерфейса RS-485, необхіден блок конвертації інтерфейсів. Цю функцію виконує конвертер ADAM-4510. Інформація про налаштування конвертера наведена у пункті 2.1.3.
2. Програмне та конструктивне забезпечення робочої станції мережі
2.1 Протокол фізичного рівня
2.1.1. Протокол RS-485
Існує декілька протоколів фізичного рівня каналу для промислових мереж, але на даний час одним з найбільш поширених є RS-485. Розглянемо його більш детально:
У RS-485 для передачі та прийому даних використовується СОМ-порт, що є найдешевшим, але повільним та не дуже надійним варіантом. RS-485 - це полудуплексний протокол, тобто передача даних може вестися по обом напрямкам у мережі з обов'язковим розподілом у часі. Мережа, побудована на RS-485, представляє собою прийомо-передавачі, поєднані витою парою. В основі протокола полягає принцип диференційної передачі даних. По одному проводу (умовно A) йде оригінальний сигнал, а по іншому (умовно B) - його інверсна копія. Таким чином, між двома проводами витої пари завжди є різниця потенціалов: при "1" вона додатна, при "0" - від'ємна.
Рисунок 2 - Рівні сигналів у протоколі RS-485
Мережа з такою реалізацією має високу стійкість до синфазних (тих що діють на обидва проводи одночасно) перешкод. Оскілки більшість перешкод є синфазними - це дуже важливий момент. Більш того, на довгому відрізку електричної лінії завжди є різниця потенціалів. При диференційній передачі це не має значення (з точки зору інформаційної складової), бо інформацію несе не стан одного провода у поточний момент часу, а різниця їх станів. Однакова зміна рівнів не пошкодить дані у каналі.
Передача виконується наступним чином:
по замовчанню передатчик встановлює на лінії одиничний рівень напруги. Передача починається надсиланням біта с нульовим рівнем (старт-біта), далі йдуть біти даних молодшим бітом уперед, завершується посилка передачею одного чи двух бітів з одиничным рівнем (стоп-бітів).
Електричний сигнал кадра посилки має наступний вигляд:

Рисунок 3 - Формат кадра RS-485
До початку зв'язку між двома пристроями необхідно налаштувати їх на однакову швидкість передачі та формат кадра. Однак, майже завжди, ці параметри не потрібно змінювати під час роботи, тому краще встановити їх у процесі початкової ініціалізації робочою станції мережі. Типовий диапазон швидкостей: 2400 … 115200 бод. Чим більше швидкість, тим більше вірогідність виникнення помилки. Таким чином, має сенс обирати мінімальну швидкість з усіх тих, що задовольняють вимоги системи. Оберемо 9600 бод, як стандартну швидкість для зв'язку через СОМ-порт. Формат кадра визначає кількість стоп-бітів, кількість бітів даних, призначення дев'ятого біта даних, якщо він є, наявність та тип перевірки парітета Для реалізації у нашому випадку оберемо комбінацію у 1 стартовий та стоповий біт, 8 біт даних, без перевірки паритета. Таким чином довжина кадра RS-485 складатиме 10 біт.
2.1.2 Реалізація протокола на RTU-188
Оскільки мікросхема RTU188 має ядро AM188ES та вбудований прийомо-передавач RS-485 реалізація обраного протоколу фізичного рівня не потребує додаткових конструктивних рішень. Для збереження процесорного часу реалізуємо передачу з використанням переривань. Для зв'язку використовується порт СОМ2, оскільки СОМ1 виконує роль консолі ДОС для програмування контролера (СДЕЛАТЬ ССЫЛКОЙ)(Література (4)). Загально ідею передачі можна зобразити так: після запуску системи ініціалізується СОМ2, встановлюються параметри передачі, встановлюються обробники переривань. Після цього система очікує на нову інформацію, яку необхідно передати до головної станції. Якщо така інформація є, її необхідно розмістити у буфері передачі, а потім достатньо передати перший її символ. Для цього він надсилається до регістра передачі. Коли символ буде передано, обробник переривань від СОМ2 зреагує на звільнення буфера передачі та отримає керування. Оскільки статус системи на даний момент потребує продовження передачі, наступний символ з буфера передачі потрапить до регістра передачі і так буде продовжуватися доки процес не буде заблоковано. Це можна зробити аналізуючи кількість переданих символів, або обравши якийсь стоповий символ та розмістивши його у буфері передачі після інформаційного пакету. Оскільки кількість байтів що передаються, згідно з завданням, завжди однакова (22 символа), був обраний перший варіант. Розглянемо процес ініціалізації СОМ-порта та встановлення параметрів зв'язку. Для налаштування швидкості передачі існує спеціальна функція 14-го переривання з наступними параметрами:
Таблиця 1 - Параметри функції 0х80 переривання 0х14
Тоді програмно це буде мати наступний вигляд:
_AX=0x8073; // COM2: 9600 бод, без контроля парності, 1 стоповий біт
_DX=1;
geninterrupt(0x14);
Для увімкнення передатчиків RS-485 використовується функція 0х84 переривання 0х14.
Таблиця 2 - Параметри функції 0х84 переривання 0х14
Тоді програмно це буде мати наступний вигляд:
_AX=0x8401;
_DX=0x0001;
geninterrupt(0x14);
Для функціонування станції необхідно також дозволити прийом, передачу та обробку переривань від СОМ2 у регістрі керування 0хFF10, який має наступний формат:
Рисунок 4 - Формат регістра керування COM2 (0xFF10)
Таблиця 3 - Коди режимів у регістрі керування СОМ2
Зчитаємо поточний стан цього регістра та встановимо необхідні біти: RST, TXIE, RXIE, TMODE, RMODE = 1
Біти MODE не має необхідності змінювати, бо потрібна кількість інформаційних розрядів вже була встановлена функцією 0х80 переривання 0х14 раніше.
_AX=inport(0xFF10) | 0x11E0;
outp(0xFF10,_AL);
Також, щоб запобігти небажаних ситуацій, на початку роботи необхідно звільнити вхідний регістр та зкинути можливі активні у поточний час переривання від СОМ2.
inport(0xFF16); // Free InPort
outp(0xFF22,Vector); // Close Current Interrupt from COM2
Вектор переривання від СОМ-порта (СОМ2) має номер 0х11. Щоб встановити власний обробник переривань небхідно заборонити переривання, замінити стандартний обробник на новий (наприклад стандартними функціями мови С) та дозволити переривання знов.
InterruptsOff; // заборона усіх переривань
OldHandler=getvect(Vector); // збереження старого вектора
setvect(Vector,Handler); // встановлення нового вектора
InterruptsOn; // дозвіл усіх переривань
Де Handler - це новий обробник переривань.
Таким чином, після виникнення переривання, керування отримує функція Handler. Необхідно дізнатися про причину виникнення переривання, для чого аналізується регістр стану порта СОМ2 з адресою 0хFF12. Біт THRE, встановлений до одиниці показує, що дані для передачі вже можна записувати до вихідного регістра. Запис до вихідного регістра зкидує цей біт.
Рисунок 5 - Формат регістра статуса СОМ2 (0хFF12)
Програмно це буде мати наступний вигляд:
Status =inport(0xFF12); // Порт статуса Com2
if (Status & 0x40) // Регістр передавача звільнився
{
...
}
if (Status & 0x80) // Виникла помилка парності
{
...
}
Регістр передачі має адресу 0хFF14. Коли передача дозволена, усі байти, що надсилаються до нього, з'являються у мережі. Надіслати поточний символ з буфера передачі можна наступним чином:
outp(0xFF14,S[Ti][Tj]);
У кінці обробника переривань обов'язково повинна стояти команда
outp(0xFF22,Vector);
для зкиду запиту на переривання від СОМ2.
Аналіз необхідності передавати перший пакет виконується по перериванню від системного таймера, що виникає 18.2 раза у секунду. Матеріалом для аналізу є результат порівняння старого та нового значення датчиків. Новий обробник для таймера встановлюється аналогічно попередньому випадку (номер вектора: 0х08), але після завершення роботи керування повинен отримати старий вектор, щоб не пошкодити реалізацію системного часу. Більш докладно про це можна дізнатися з (СДЕЛАТЬ ССІЛКОЙ)Літератури (1).
Символи передачі - це звичайні ASCII символи. Числа передаються у символьному вигляді у десятинній системі числення. Для збереження постійної кількості символів там де необхідно додаються нулі. Наприклад, формування у буфері поточної години виконується так:
if (t.ti_hour<=9) strcat(S[0],"0"); // Appends 0 to number
itoa(t.ti_hour,Buf,10);
strcat(S[0],Buf);
strcat(S[0],":");
Системним прапором необхідності вести передачу є змінна Transmit.
2.1.3 Налаштування конвертера ADAM-4510
Конвертер АDAM підключається між комп'ютером та іншою частиною мережі як послідовний елемент. Він живиться від напруги (+10) - (+30) В. Конвертер здійснює перетворення протоколу RS-485 до протоколу RS-232, власно роспізнаючи напрямок передачі. Конвертер підтримує різні швидкості та розмір кадру. Підключення проводів здійснюється наступним чином виводи Tx+ та Rx+ порта СОМ2 RTU188 поєднуються разом та подаються на вивод Data+, аналогічно Tx- та Rx- поєднуються з Data-. Налаштування конвертера на необхідні параметри мережів виконується за допомогою двох матриць вбудованих тумблерів: SW1, SW2. Тумблери першої матриці мають два положення та кодують кількість біт у пакеті наступним чином:
Таблиця 4 - Встановлення формата кадра конвертера ADAM-4510

Встановимо перший тумблер у положення "вкл", а другий у "викл", оскільки довжина кадра фізичного рівня складає 10 біт.
Подібним чином встановлюється швидкість передачі у 9600 бод (тумблер 5 - "вкл", інші - "викл"), як зазначено у таблиці 5.
Таблиця 5 - Встановлення швидкості передачі конвертера ADAM-4510
2.2 Протокол канального рівня
2.2.1 ASCII - протокол
У даній научно-дослідницькій роботі у якості протоколу канального рівня використовувався ASCII - протокол. Цей протокол не має полей адреса, контрольних сум та містить тільки інформаційне поле. Перевагою такого протокола є простота реалізація та висока швидкість. Разом з тим, він обмежує кількість робочих станціє до одиниці. Оскільки у подальшому розвитку проекта планується збільшення кількості робочих станцій та підвищення інформаційної надійності мережі АSCII протокол не задовольняє цим потребам. Таким чином, можна відзначати, оскільки тестування працездатності мережі на цьому протоколі було виконано, у майбутньому протокол АSCII буде замінено на Мodbus ASCII. Кадр канального рівня має наступний формат: **:**:** - ******:*.**.
Перші 3 поля заповнюються поточною годиною, хвилиною та секундою відповідно. Четверте поле - це стан 16 дискретних датчиків. Останнє поле - стан аналогового датчика. Наприклад: 10:09:24 - 060040:5.54
2.2.2. Modbus ASCII - протокол
Детальний опис Modbus зайняв би багато місця, отже обмежимось коротким оглядом. Протокол Modbus - це найпоширеніший протокол у промисловості. Велика кількість апаратних засобів підтримує його по замовчанню. Існує декілька різновидів Modbus, але на даний час Modbus ASCII є найбільш поширеною та вдалою модифікацією. Цей протокол відрізняється від ASCII-протокола наявністю полей адреси, що дозволяє реалізувати зв'язок декількох станцій (до 32 у одному сегменті мережі) з розділом у часі. Цей протокол вводить поняття Master (передавач) та Slave (приймач). У мережі повинен діяти арбітраж, щоб виключити можливість одночасної передачі двома чи більшe станціями. Оскільки передбачається, що усі робочі станції будуть рівноправними, має сенс надати функції арбітражу головній станції, що по черзі буде давати дозвіл на передачу робочим станціям мережі.
Інша особливість протокола - це наявність контрольної суми даних. Контрольна сума створюється передавачем, а аналізується та вираховується заново приймачем. Якщо прийнята та вирахована суми не співпадають - пакет інформації був пошкоджений, отже ці дані не можна надавати користувачу як достовірні. Реакція на недостовірну інформацію може відрізнятися у залежності від конкретної реалізації. Також у кадрі протокола міститься поле функції. Воно визначає довжину, чи навіть наявність поля даних. Прикладами функцій можуть бути: "дозвіл на передачу", "провести повторну ініціалізацію", "більше не передавати дані". Протокол передбачає як індивідуальну так і широкомовну адресацію.
3. Програмне забезпечення головної станції мережі
3.1 Огляд SCAD-систем на прикладі Advantech Studio 5.1
CAD - системи це системи автоматизованого проектування. Межі їх використання у сучасній науці, промисловості постійно розширюються. Автоматизоване проектування дозволяє швидко та надійно реалізувати систему, що вирішує проблемні питання від чисто абстрактних математичних досліджень до конкретно використовуваних проектів. SCAD (Structural CAD) система Advantech Studio 5.1 призначена для гнучкої реалізації комп'ютерних, промислових та інших мереж. До складу цього продукту входить комплекс драйверів, що охоплює більшість з існуючих на даний час протоколів зв'язку, набір стандартних екранних компонент, що дозволяють візуально відобразити протекаючі у системі процеси, математичний та процедурний апарат, що фактично представляє собою мову програмування високого рівня. Повний опис програмного продукта Advantech Studio можна знайти у документаціях виробника, що наведені у списку літератури даного звіту.
3.2 Встановлення драйвера ASCII протокола
Драйвер ASCII протокола є серед стандартних драйверів Advantech Studio 5.1, тож встановлюється він, як і усі інші. Для додання нового драйвера у проект Advantech Studio 5.1 необхідно відкрити відповідний розділ у вікні Workspace, нажавши Insert додати новий драйвер з переліка підтримуваних. У даному випадку це буде драйвер "Serial Tx/Rx". Після додання драйвера необхідно налаштувати його параметри.
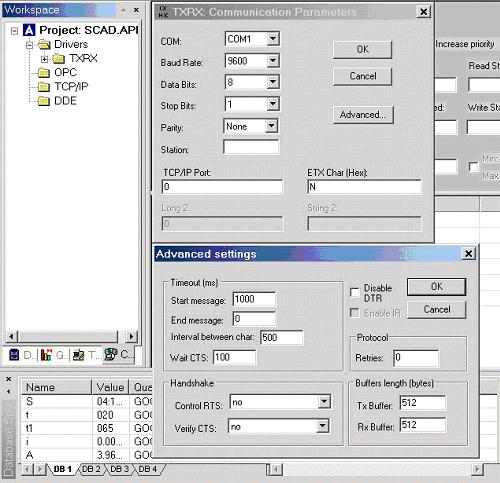
Рисунок 6 - Налаштування параметрів драйвера ASCII - протокола
Окно Advanced Setting містить настройки по замовчанню, що визначають таймаути, розміри буферів та інше. Змінювати їх у даному випадку не потрібно. Головне вікно TXRX Communication Parameters повинно бути заповнено належним чином. Зв'язок здійснюється через СОМ1, отже обрано цей порт зі списку існуючих. Параметри швидкості та формату фізичного кадра обрані відповідно до параметрів робочої станції. Поля Station TCP-IP відносяться до Ethernet протоколу, який також підтримується драйвером "Serial TxRx", їх необхідно заповнити так як зображено на рисунку 6. Поле ETX Char (Hex) визначає як буде впізнаватися кінець повідомлення. Якщо у цьому полі стоїть N - це означає що кінець повідомлення буде впізнаватися по кількості символів, що встановлюється у вікні налаштування протоколу (пункт 3.4)
3.3 Оголошення змінних
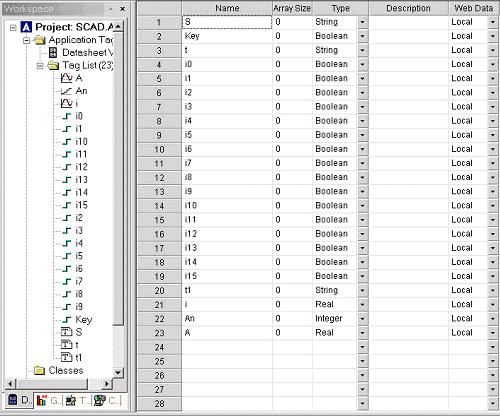
Рисунок 7 - Оголошення змінних
Додаткові змінні (окрім стандартних визначених) оголошуються у розділі Variables вікна Workspace. Версія Advantech, що є у наявності, неповна, у ній не підтримуються масиви змінних. Таким чином кожна змінна повинна бути визначена окремо. Змінні i0-i15 мають логічний тип Boolean, тобто приймають 2 значення: true та false. Ці змінні потрібні для відображення стану 8 дискретних датчиків на екрані.
Змінна S містить інформацію, що надійшла з мережі безпосередньо. Отже тип цієї змінної має бути String, оскільки це єдиний тип, що складається з багатьох змінних у даній версії Advantech Studio.
Змінні t та t1 містять стан дискретних датчиків. Кожен біт цих змінних визначає стан окремого датчика. Змінні t та t1 виділяються зі змінної S, як її частини (пункт 3.5). Оскільки вони повинні складатися з трьох символів - то теж мають тип String.
Змінна А містить стан аналогового датчика, вона теж виділяється зі змінної S, але додатково перетворюється до числової форми. Змінна А має тип Real, оскільки вона повинна підтримувати дробові значення. Інші змінні використовувалися під час розробки та у кінцевому варіанті програми не потрібні.
3.4 Налаштування протоколу
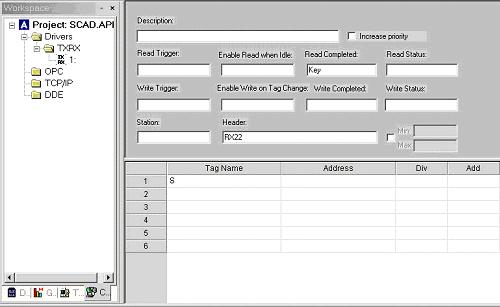
Рисунок 8 - Налаштування протоколу
Налаштування протоколу дозволяє конкретизувати параметри мережі, але вже не на канальному, а не фізичному, рівні. Використаний протокол ASCII не потребує встановлення номерів станції чи інших додаткових параметрів. Потрібно лише визначити кількість символів у пакеті (визначення кінця саме по кількості символів було зроблено у пункті 3.2). Поле Header повинно містити строку конкретизації протоколу. Оскільки кожний пакет складається з 22 символів, поле містить строку RX22, що означає завершення прийняття кожного окремого пакета по прийому кожного 22-го символа. Нижню частину вікна займає поле призначення змінних. Змінна S буде містити поточний прийнятий пакет, тому вона вписана у ділянку TagName.
3.5 Використання модуля Math
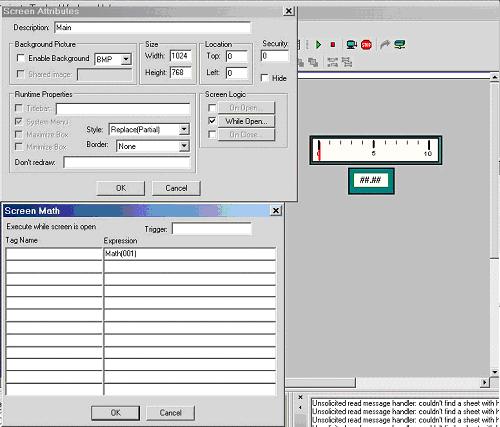
Рисунок 9 - Підключення модуля Мath до вікна
Під час роботи програми деякі функції повинні виконуватися циклічно, тобто бути резидентними. Визначити їх можна у атрибутах кожного екрану. Але вікно призначення обмежено 12 рядками, отже скористаємось іншим апаратом для реалізації резидентної частини програми. Цю можливість дає модуль Мath. У параметрах робочого вікна у ділянці Expression зазначимо, що доки вікно залишається відкритим буде виконуватися модуль Math з номером 001 (Рисунок 9).
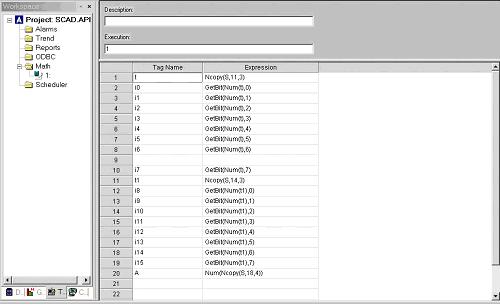
Рисунок 10 - Заповнення модуля Math резидентними функціями
Програмний апарат Мath теж знаходиться у одному з розділів вікна Workspace. Кількість програмних модулів може бути різною, у нашому випадку достатньо одного модуля. Заповнимо його наступним чином:
поле Execution визначає коли буде виконуватися модуль. Воно може містити будь який вираз, що має логічне значення. Одиниця означає безкінечне виконання. На головній частині вікна є пронумеровані рядки. Це послідовність виконуємих модулем команд. Потрібно виділити з надісланого до головної станції пакета-повідомлення його функціональні частини, як то стан цифрових та аналогових датчиків. Це зроблено за допомогою стандартних функцій Advantech. Функція NCopy(S, 11, 3) виділяє зі строки S, починаючи з 11-го символа, 3 символа поспіль. (Нумерація починається з нуля). Результат типу String повертається до змінної t, що зазначена у ділянці Tag Name. Аналогічно NCopy(S, 18, 4) виділяє 4 символа поспіль зі строки S, починаючи з 18-го, та повертає результат до змінної А. Змінні i0-i15 містять окремі біти, відокремлені зі змінної t командою GetBit. Наприклад, GetBit(Num(t1),6) виділяє шостий біт з числа, яке є числовим еквівалентом трьохсимвольного рядка t1. Функція Num змінює тип String на Integer.
3.6 Розміщення та ініціалізація компонент робочого екрана
Екранні компоненти розміщуються на вікні шляхом обору потрібної з наявної бібліотеки (Library), чи конструювання власної.
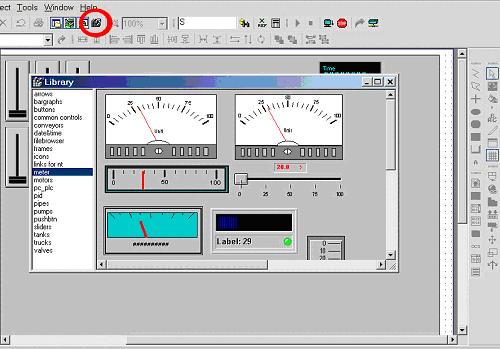
Рисунок 11 - Обір компоненти зі стандартної бібліотеки
Вкладка Meter стандартної бібліотеки містить набір компонент, що дозволяють у реальному часі відображати рівні сигналів. Оберемо одну компоненту з двома положеннями для відображення стану дискретних датчиків, та одну компоненту з повзуном для відображення стану аналогового датчика.
Остання компонента дозволяє змінити цифрові підписи, отже змінимо стандартні числа 0-50-100 на 0-5-10, як у наявному датчику аналогової напруги, що змінюється від 0 до 10 В.
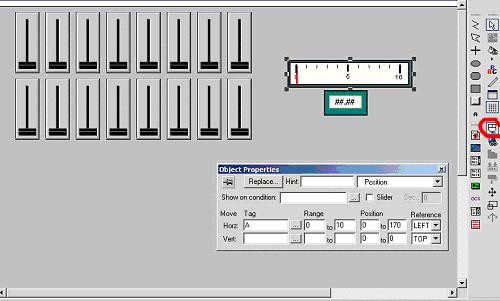
Рисунок 12 - Параметри компоненти аналогового відображення
Для зв'язку екранної компоненти зі змістом відповідної змінної потрібно вказати, що ця компонента є об'єктом керування. Це робиться обіром відповідної (обведеної червоним на рисунку 3.6.2) кнопки на панелі редагування. Після цього у вкладці Position, визначимо диапазон зміни від 0 до 10, що відповідає граничним положенням повзуна, та змінну, що відповідає за стан горизонтального положення повзуна - змінну А. Для більш чіткого визначення аналогового сигналу додамо текстове значення. Компонента TextIO з панелі редагування дозволяє створити рядок текста, який буде пов'язаний зі змінною (декількома змінними), змінні, використані в усіх компонентах можуть бути як стандартними (наприклад, поточний час), так і змінними користувача. Визначимо ту саму змінну А з точністю 2 знака після коми для відображення у компоненті TextIO.
Аналогічним чином робиться пов'язання змінних і0-і15 з відповідними екранними тумблерами. Змінна і0 відповідає за вертикальну позицію тумблера першої компоненти такого типу, і1 - наступної, і т.д.
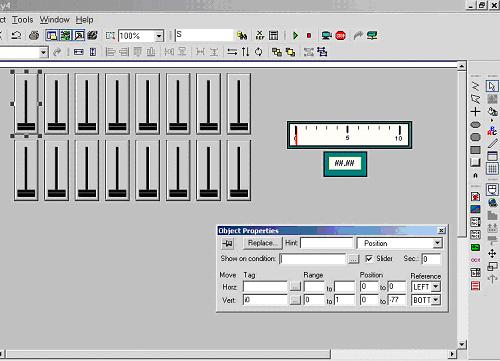
Рисунок 13 - Параметри компоненти дискретного відображення
Остаточний результат робочого екрану програми після запуску середовища та у процесі роботи можна побачити на рисунках 14, 15.
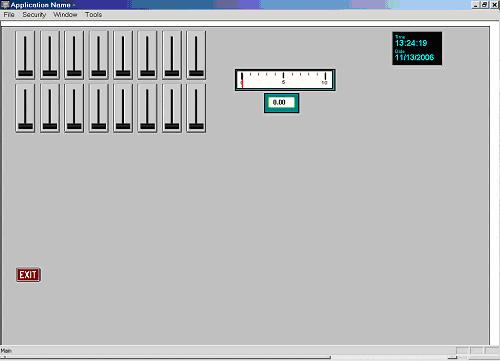
Рисунок 14 - Програмне забезпечення головної станції на початку роботи
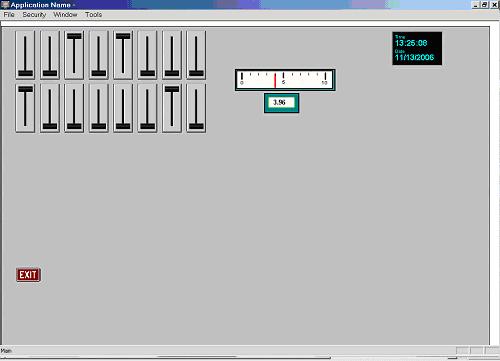
Рисунок 15 - Програмне забезпечення головної станції у процесі роботи
Висновок
На базі наявних апаратних засобів було розроблено систему передачі та контроля інформації. Система функціонує і може бути пристосована для використання у конкретних специфічних умовах. Але у рамках НІРС не могли бути реалізовані усі бажані властивості такої системи. Метою подальшого проектування залишається розробка та реалізація протоколу Modbus для керування декількома робочими станціями, використання півторювачів для реалізації довгих (до 1200 метрів - один сегмент) ділянок, а також бар'єрів іскробезпеки, що дозволить використати систему у шахтних чи інших промислових умовах. Інші сторони та особливості подальшої розробки будуть визначатися технічним завданням
Література
1. Звіт студента гр. КС06-М Земцової Т.А. "Система збору інформації у промисловому середовищі"
3. "RS-422 and RS-485 Application Note"
4. "Fastwel RTU-188 Руководство пользователя" "Приложение А. Встроенные устройства микроконтроллера AM188ES"
5 "ADAM 4510/4510S User's Manual"
6. "Advantech Studio v5.1 Technical Reference Manual"
7. "Advantech Studio v5.1 Getting Started Guide"