

|
|
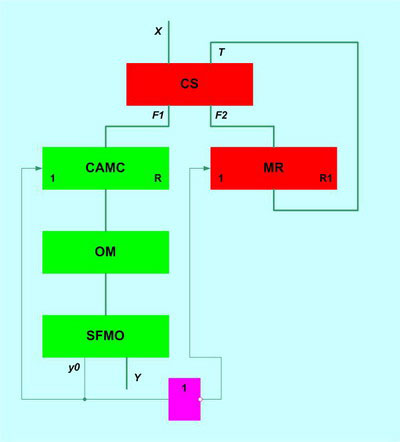
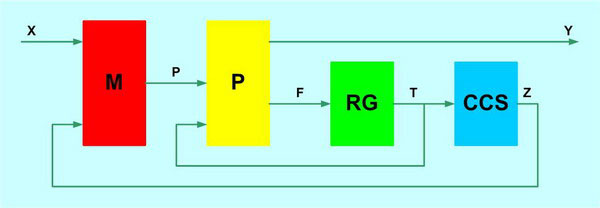
Авторефератна кваліфікаційну роботу магістра за темою:"Синтез та дослідження композиційних мікропрограмних пристроїв керування із використанням методу кодування полів сумісних мікрооперацій"Огляд існуючих рішень та методів Опис отриманих та запланованих результатів ВступУ наш час у багатьох сферах виробництва застосовується керування технологічними процесами за допомогою цифрових електронних систем. При цьому до функціонування та побудови цих систем пред'являються різноманітні вимоги. В одних галузях виробництва потрібна висока швидкість керування технологічними процесами, а в інші - низькі апаратні витрати при побудові систем керування. У цій роботі була зроблена спроба створити структуру керуючого автомата, що була б оптимальної з погляду апаратних витрат та швидкодії. Традиційна структура автомата із "жорсткою" логікою має найвищу швидкодію серед усіх відомих структур синхронних кінцевих керуючих автоматів. Але автомати із "жорсткою" логікою мають один великий недолік - нерегулярність структури, що ускладнює їхню реалізацію на великих інтегральних схемах (ВІС). Автомати із програмувальною логікою мають більш регулярну структуру, але мають при цьому ряд недоліків: багатоспрямовані умовні переходи у цих автоматах виконуються за кілька тактів роботи; у форматі мікрокоманд цих автоматів необхідно задавати як мінімум одну адресу переходу, що збільшує розрядність мікрокоманд а, отже, і ємність керуючої пам'яті. Усі перераховані недоліки двох видів керуючих автоматів нівелюються у композиційному мікропрограмному пристрої керування (КМПК), структура якого - це об'єднання структур автомата із "жорсткою" логікою та автомата із програмувальною логікою. Структура КМПК зображена на рис. 1. У такій структурі керуючого автомата багатоспрямовані умовні переходи виконуються за один такт роботи автомата, формат мікрокоманд таких автоматів містить тільки операційну частину і при цьому структура такого автомата має регулярний характер.
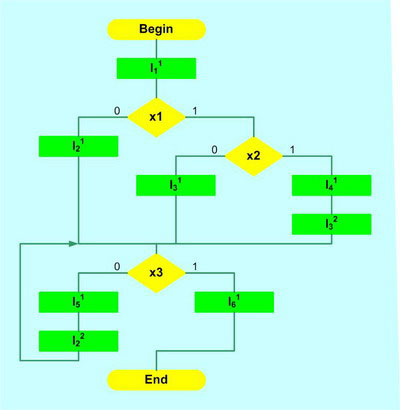
Де: CS – комбінаційна схема; CAMC – лічильник адреси мікрокоманд; OM – керуюча пам'ять; SFMO – схема формування мікрооперацій; MR – регістр пам'яті. Актуальність роботиМінімізація апаратних витрат при побудові кінцевих керуючих автоматів - це класичне завдання досліджень в області інформатики та математики. Науковці кафедри ЕОМ ДонНТУ вже багато років активно займаються вивченням методів мінімізації апаратних витрат при побудові керуючих автоматів, при використанні яких швидкодія автоматів знижується якнайменше. Мною був запропонований метод кодування полів сумісних мікрооперацій в операційній частині КМПК та реалізація автомата Мілі у складі КМПК у вигляді дворівневої схеми MPL автомата. Запропоновані у роботі методи мінімізації апаратних витрат у КМПК досягають поставлене завдання при незначному зниженні швидкодії КМПК. Мета та задачі роботиМетою поданої роботи є синтез та дослідження КМПК із використанням кодування полів сумісних мікрооперацій в операційній частині автомата та із застосуванням дворівневої схеми MPL автомата у складі КМПК. Синтез та дослідження КМПК виконуються у базисі сучасних ВІС. Для досягнення поставленої мети вирішуються наступні локальні задачі: вивчення існуючих методів синтезу КМПК; аналіз існуючого елементного базису ВІС; розгляд існуючих методів кодування полів сумісних мікрооперацій; розробка алгоритмів синтезу та оптимізації КМПК; програмна реалізація розроблених алгоритмів. Передбачувана наукова новизнаНаукова новизна даної роботи полягає у знаходженні оптимальної структури КМПК із погляду апаратних витрат та швидкодії для реалізації алгоритмів керування із певними параметрами. Була знайдена закономірність між параметрами конкретних алгоритмів та структурою КМПК, на якому реалізуються ці алгоритми, з метою оптимізації структури КМПК з погляду швидкодії та апаратних витрат. Практична цінність роботиПрактична цінність даної роботи полягає у побудові КМПК, у якому застосовується така комбінація методів оптимізації автомата, яка раніше не застосовувалася по відношенню до КМПК і яка дозволяє досягти максимальну оптимізацію КМПК з погляду співвідношення "апаратні витрати + швидкодія". Також була розроблена комп'ютерна програма синтезу та оптимізації КМПК за завданими вхідними параметрами алгоритмів керування. Огляд існуючих рішень та методівУ наш час існує велика кількість методів оптимізації кінцевих керуючих автоматів із різноманітними структурами. З вітчизняних учених, які займаються дослідженнями у даній області, найбільш відомим є професор кафедри ЕОМ ДонНТУ Баркалов О. О. Серед методів оптимізації керуючих автоматів із "жорсткою" логікою існують методи синтезу дворівневої, трьохрівневої та багаторівневої структур автоматів Мілі та Мура. Також існують методи реалізації керуючих автоматів на лічильниках. Було розроблено безліч методів оптимізації автоматів із програмувальною логікою і зокрема методів оптимізації операційної частини цих автоматів. Був розроблений ряд алгоритмів мінімізації розрядності керуючої пам'яті при кодуванні полів сумісних мікрооперацій: алгоритм Шварца, алгоритм Граселі-Монтанарі, алгоритм Даса, алгоритм гілок та меж тощо. Усі перераховані алгоритми, крім алгоритму Шварца, вимагають багато часу для розподілу мікрооперацій по окремим полям. Але алгоритм Шварца хоч і має найбільшу швидкість роботи, не гарантує оптимального розподілу мікрооперацій. Опис отриманих та запланованих результатівУ результаті виконання роботи був розроблений алгоритм визначення операторних лінійних ланцюгів (ОЛЛ) у алгоритмах керування. Приклад виділення ОЛЛ у алгоритмі зображений на рис. 2.
У результаті виділення ОЛЛ та синтезу автомату із програмувальною логікою у складі КМПК алгоритм керування переходить до виду, що зображений на рис. 3. У роботі був розроблений алгоритм перетворення алгоритму керування.
Перетворений алгоритм керування реалізується у вигляді MPL автомата у складі КМПК, структурна схема якого зображена на рис. 4.
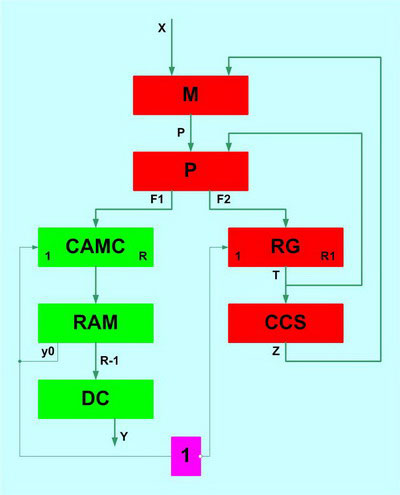
Розроблена структура КМПК зображена на рис. 5.
Також у роботі планується створення програми, що реалізує усі розроблені алгоритми для синтезу КМПК. ВисновокУ результаті виконання роботи були проаналізовані існуючі методи оптимізації структур кінцевих керуючих автоматів та елементний базис ВІС, у якому планується реалізація розробленої структури КМПК. Також були розроблені алгоритми синтезу та оптимізації структури КМПК. Надалі планується розробка програмного забезпечення, у якому реалізуються розроблені методи та алгоритми. Літературні джерела
|

|
|
|
|
|
|