| ДонНТУ | Портал магистров ДонНТУ | Главная | Реферат | Ссылки | Отчет о поиске | Индивидуальное задание |
Назад в Библиотеку
Fingerprint Image Enhancement: Algorithm and Performance Evaluation
Улучшение изображений отпечатков пальцев: алгоритм и оценка выполнения
Lin Hong, Student Member, IEEE, Yifei Wan and Anil Jain, Fellow
Источник:
IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 20, NO. 8, AUGUST 1998
Перевод с английского языка Петровой Т. В.
|
2. УЛУЧШЕНИЕ ОТПЕЧАТКА ПАЛЬЦА Алгоритм улучшения изображения отпечатка пальца получает на вход изображение отпечатка пальца, применяет набор промежуточных шагов на входном изображении, и в итоге дает на выходе улучшенное изображение. Чтобы представить наш алгоритм улучшения изображения отпечатка пальца, ниже приводится список условных обозначений и некоторые базовые определения. 2.1. Обозначения Полутоновое изображение отпечатка пальца – I, определяется как матрица размерности N x N, где I(i, j) представляет яркость пикселей в i-той строке и j-том столбце. Мы допускаем, что все изображения отсканированы с разрешением 500 точек на дюйм (dpi), поскольку это разрешение рекомендовано ФБР. Средняя величина и расхождение полутонового изображения отпечатка пальца, I, определяется как:
Ориентационное изображение, O, определяется как N x N изображение, где O(i, j) представляет локальную ориентацию выступов на пикселе (i, j). Локальная ориентация выступов обычно определяется для блока лучше и точнее, чем в каждом пикселе; изображение разделяется на набор непересекающихся блоков размерности w x w и единственная локальная ориентация выступов определяется для каждого блока. Заметим, что в изображении отпечатка пальца отсутствует различие между локальной ориентацией выступов на 90 или 270, так как выступы, ориентированные на 90, и выступы, ориентированные на 270, в локальном соседстве не могут быть различены друг от друга. Частотное изображение, F, представляет собой изображение размерности N x N, где F(i, j) представляет локальную частоту выступа, которая определяется как частота структур выступов и впадин в локальном соседстве вдоль (параллельно) направления нормали к локальной ориентации выступа. Структуры выступов и впадин в локальном соседстве (рисунок 4), где детали или особые точки не формируют четко определяемую синусоидально-очерченную волну. В таких ситуациях, частота определяется как средняя величина частоты в соседстве от блока (i, j). Подобно ориентационному изображению, частотное изображение определяется поблочно.
Рисунок 4 – Структуры выступов и впадин в локальном соседстве от детали Областная маска, R, определяется как N x N изображение, где R(i, j) показывает категорию пикселя. Пиксель может быть:
Областная маска также определяется поблочно. 2.2. Алгоритм Структурная схема алгоритма улучшения отпечатка пальца показана на рисунке 5.
Рисунок 5 - Структурная схема предложенного алгоритма улучшения отпечатка пальца Основные шаги алгоритма включают в себя:
2.3. Нормализация Пусть I(i, j) обозначает полутоновое значение (уровня яркости) пикселя (i, j), M и VAR обозначают оценочное среднее значение и изменение изображения I соответственно, а G(i, j) обозначает нормализованное полутоновое значение пикселя (i, j). Нормализованное изображение определяется как:
где M0 и VAR0 заданное (желательное) среднее значение и значение изменения соответственно. Нормализация – это операция над пикселями. Она не меняет четкость структур выступов и впадин. Главное назначение нормализации - уменьшить изменения (колебания) в полутоновых значениях вдоль выступов и впадин, что облегчает последующие шаги обработки. Рисунок 6 показывает пример нормализации изображения.
Рисунок 6 – Результат нормализации. (a) Входное изображение. (b) Нормализованное изображение (M0 = 100, VAR0 = 100). 2.4. Ориентационное изображение Ориентационное изображение представляет собой важное свойство изображений отпечатков пальцев и определяет постоянные координаты для выступов и впадин в локальном соседстве. Для представления изображения отпечатка пальца в виде ориентированной текстуры, был предложен ряд методов оценки ориентационного поля для изображения отпечатка пальца. Мы разработали алгоритм оценки ориентации с помощью метода наименьших квадратов. Дано нормализованное изображение, G, главные шаги алгоритма следующие:
С этим алгоритмом может быть получена довольно ровная (сглаженная) оценка ориентационного поля. Рисунок 7 показывает пример ориентационного изображения, вычисленного нашим алгоритмом.
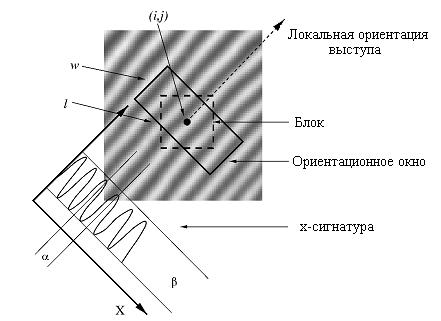
Рисунок 7 – Пример ориентационного поля, полученного данным методом w=16 и wф=5 2.5 Частотное изображение выступа В локальном соседстве, где не обнаруживаются детали и особые точки, уровни яркости (серого) вдоль выступов и впадин могу быть смоделированы как синусоидально-очерченная волна вдоль направления нормали к локальной ориентации выступа (смотри рисунок 8).
Рисунок 8 – Ориентационное окно и х -сигнатура Поэтому локальная частота выступов - это другое важное свойство, присущее изображению отпечатка пальца. Пусть G – нормализованное изображение, а O – ориентационное изображение, тогда шаги, включающие в себя оценку локальной частоты выступов следующие:
2.6. Областная маска Как было упомянуто ранее, пиксель (или блок) во входном изображении отпечатка пальца может находиться в одной из двух областей: в обратимой области или в необратимой области. Классификация пикселей к обратимой или к необратимой категории может выполняться, основываясь на оценке формы (очертаний) волны, сформированной локальными выступами и впадинами. В нашем алгоритме используются три признака, чтобы охарактеризовать синусоидально-очерченную волну: амплитуда (
Мы выбрали несколько типичных изображений отпечатков пальцев, где обе обратимая и необратимая области были вручную помечены и вычислили три признака для этих областей. В итоге 2000 трехмерные образца были получены. Чтобы найти типичные образцы для двух классов, мы подали 2000 образцов в алгоритм группирования (кластеризации) с квадратичной ошибкой и определили шесть групп (кластеров). Четыре из этих групп соответствовали обратимым областям и оставшиеся две соответствовали необратимым областям. Шесть опытных образцов (соответствующие шести центрам кластеров) были использованы в классификаторе одного ближайшего соседа (1NN), чтобы классифицировать каждый w x w блок во входном изображении отпечатка пальца к обратимому или необратимому блоку. Если блок, центрированный в (i, j) является обратимым, то R(i,j)=1, иначе R(i,j)=0. После того, как получено изображение R, вычислен и процент обратимых областей. Если процент обратимых областей меньше, чем пороговая величина, Gобратимое = 40, то входное изображение отпечатка пальца бракуется (отклоняется). Допущенное изображение, затем проходит контроль через этап фильтрации. 2.7 Фильтрация Очертания (формы) параллельных выступов и впадин с хорошо определяемой частотой и ориентацией на изображении отпечатка пальца содержит полезную информацию, которая помогает в устранении нежелательные шумов. Синусоидально-очерченные волны выступов и впадин изменяются медленно в локальной постоянной ориентации. Поэтому полосовой фильтр, который настраивается на соответствующую частоту и ориентацию, может эффективно удалять нежелательные шумы и сохранять достоверные структуры выступов и впадин. Фильтры Габора имеют как частотно-отборочные, так и ориентационно-отборочные свойства и дают оптимальное объединенное решение, как в пространственной, так и в частотной областях. Поэтому целесообразно использовать фильтры Габора как полосовые фильтры, чтобы устранить шумы и сохранить достоверные структуры выступов и впадин. Ровно-симметричный фильтр Габора имеет общую формулу:
xф = x cos ф + y sin ф
(19) где ф - ориентация фильтра Габора, f – частота синусоидальной плоскостной волны, а
uф = u cos ф + v sin ф
(22)
где Для применения фильтров Габора к изображению необходимо задать три параметра:
Очевидно, что частотная характеристика фильтра, f, полностью определяется локальной частотой выступа, а направление определяется локальной ориентацией выступа. Выбор значений
где wg = 11 определяет размер фильтров Габора. 3. ЭКСПЕРИМЕНТАЛЬНЫЕ РЕЗУЛЬТАТЫ И ОЦЕНКА ВЫПОЛНЕНИЯ |


 (i,j) – оценка методом наименьших квадратов локальной ориентации выступа в блоке, расположенном симметрично относительно пикселя (i, j). Математически она представляет направление, которое является ортогональным к доминантному направлению спектра Фурье окна размерности w x w.
(i,j) – оценка методом наименьших квадратов локальной ориентации выступа в блоке, расположенном симметрично относительно пикселя (i, j). Математически она представляет направление, которое является ортогональным к доминантному направлению спектра Фурье окна размерности w x w. 

 , вычисляется как:
, вычисляется как: 

 ),
частота (
),
частота ( ) и изменение (
) и изменение ( ). Пусть X[1], X[2],... X[l] представляет х-сигнатуру блока, центрированного в (i, j). Три признака, соответствующие пикселю (блоку) (i, j), вычисляются следующим образом:
). Пусть X[1], X[2],... X[l] представляет х-сигнатуру блока, центрированного в (i, j). Три признака, соответствующие пикселю (блоку) (i, j), вычисляются следующим образом:  .
.

 и
и  – пространственные константы огибающей (оболочки) Гаусса вдоль осей x и y, соответственно. Модуляционно-передаточная функция (МПФ) фильтра Габора может быть представлена как:
– пространственные константы огибающей (оболочки) Гаусса вдоль осей x и y, соответственно. Модуляционно-передаточная функция (МПФ) фильтра Габора может быть представлена как: 
 и
и  .
.
![]()
ВВЕРХ
| ДонНТУ | Портал магистров ДонНТУ | Главная | Реферат | Библиотека | Ссылки | Отчет о поиске | Индивидуальное задание |