Email: samir2562000@yahoo.fr
Идея создания механизма с параллельными кинематическими связями (МПКС) для повышения жесткости системы была предложена и реализована сначала Гафом, а затем Стюартом в 50-х – 60-х г.г XX века. В частности, платформа Стюарта, спроектированная в 1965 г., предназначалась для симуляции летательных аппаратов. Началом отсчета новой эры развития МПКС, эры экстремально больших скоростей и ускорений, принято считать конец 80-х, годы создания робота “Delta”. Интерес к МПКС в настоящее время вызван рядом преимуществ, которыми они обладают по сравнению с традиционными промышленными роботами, имеющими разомкнутую кинематическую цепь, т.е. традиционными роботами-манипуляторами. Замкнутая кинематическая цепь обеспечивает более высокую жесткость всей конструкции, а сокращение массы подвижных частей уменьшает нагрузки на привода. В итоге это существенно повышает динамику и точность позиционирования МПКС. Обычно, механизм с параллельными кинематическими связями, (в дальнейшем – параллельный манипулятор) состоит из движущейся платформы, которая прикрепляется к зафиксированной платформе – базе несколькими соединениями (ногами) .В большинстве случаев число ног равно числу степеней свободы. Каждое соединение управляется одним приводом, и все привода могут размещаться на или возле базы. Вследствие того, что внешняя нагрузка на подвижную платформу может разделяться между приводами, параллельные манипуляторы имеют хорошую грузоподъемность.
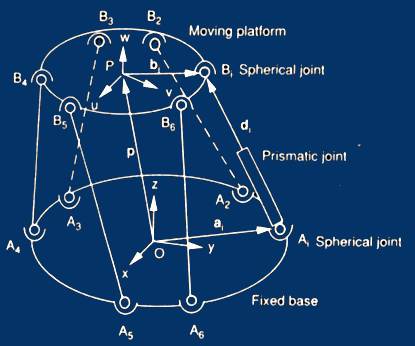
Задача моей магистерской работы состоит в детальном изучении, анализе основных принципов построения систем управления для параллельных манипуляторов с шестью степенями свободы. Для параллельного механизма Hexaslim необходимо выбрать оптимальный принцип построения системы управления и спроектировать ее. Поэтому рассмотрим основные виды параллельных манипуляторов с шестью степенями свободы и методы управления ними. Все существующие роботы и робототехнические системы могут быть классифицированы по множеству критериев. Однако основным классификационным критерием считается деление роботов по кинематической структуре. Последовательные манипуляторы состоят из нескольких звеньев последовательно соединенных различными типами соединений. Так как один конец манипулятора прикреплен к земле, а второй свободно движется в пространстве, то их еще называют манипуляторы с разомкнутой кинематической цепью. Параллельные манипуляторы (механизмы с параллельными кинематическими связями) состоят из движущейся платформы, прикрепленной к неподвижной несколькими соединениями (ногами). Обычно количество степеней свободы равно количеству ног. Гибридные манипуляторы сочетают в себе характеристики как последовательных, так и параллельных манипуляторов, т.е. они имеют разомкнутую и замкнутую кинематические цепи. Топологию кинематических связей параллельных манипуляторов принято описывать рядом букв, кодирующих тип и последовательность кинематических пар, начиная с неподвижной платформы (R – вращательная пара, P – поступательная пара, S – шаровая пара, U или (RR) – карданное соединение). Чтобы подчеркнуть, что данная кинематическая пара активная, ее буква подчеркивается. Тогда топология любого МПКС с n идентичными кинематическими связями может быть записана в виде: n-JJJJ, где J = {R, P, S}. Рассмотрим некоторые виды параллельных манипуляторов с 6 степенями свободы. В области параллельных механизмов с шестью степенями свободы, наиболее популярным является 6-UPS параллельный механизм, обычно называемый платформой Гафа-Стюарта. Действительно, почти все существующие параллельные механизмы с шестью степенями свободы, используемые в промышленности или моделировании движения (особенно полетов), базируются на 6-UPS архитектуре. Кроме того, обычно механическая часть, то есть, движущаяся база, является лишь небольшой частью стоимости высокотехнологичного симулятора полета. Из всех механизмов с шестью степенями свободы 6-UPS является наиболее прочным и позволяет использовать мощные гидравлические приводы. Пример платформы Стюарта изображен на рисунке:

Второй по популярности параллельный механизм с шестью степенями свободы – это, несомненно, 6-RUS. Часто U соединение в цепи заменяют на S соединение. Это приводит к избыточной степени свободы в каждой связи, однако, это не изменяет свойства 6-RUS параллельного механизма. Точно так же U и S соединения каждой ноги можно взаимозаменять без изменения характеристик механизма. Поэтому, обычно не делают различий между ногами типа RUS, RSS или RSU, и все обозначаются как RUS. Главные преимущества 6-RUS параллельных механизмов – это, во-первых, их легкая мобильная часть, поскольку тяжелые двигатели установлены на базе, и во-вторых, возможность использования электрических двигателей меньшей стоимости. Кроме того, такие механизмы позволяют использовать достаточно тонкие рычаги в качестве связей. Главным недостатком таких механизмов является их сложный кинематический анализ. Еще один распространенный вид параллельных манипуляторов – это механизмы с топологией 6-PUS. Пример такого механизма вы можете увидеть на анимированной картинке в начале данной страницы. По сравнению с платформой Gough-Stewart масса подвижных частей и вероятность столкновения опор у 6-PUS механизма меньше. Благодаря использованию линейных приводов HEXAPOD-робот с топологией 6-PUS отличается более высокими статическими (особенно механическая жесткость) и динамическими (особенно развиваемые ускорения) характеристиками. Существует множество способов управления параллельными механизмами. Во первых это ПИ- и ПИД- регуляторы. Они обеспечивают хорошую точность, при их относительной простоте. Следующий метод управления – это адаптивное управление с эталонной моделью для компенсации ошибок параметров системы. Затем обратный динамический закон управления. Оба эти метода, особенно с адаптивным управлением, обеспечивают лучшую точность, чем с ПИД -регуляторами, однако они являются весьма сложными при проектировании. В случае, когда требуется высокое качество управления, а параметры объекта могут непредсказуемо меняется, используются робастные системы.
Рассмотрим сначала кинематику параллельного манипулятора, т.е. движение объекта без учета сил и крутящих моментов, которые вызвали это движение. Существует два типа кинематического анализа: прямой и обратный. При прямом анализе необходимо получить положение и ориентацию подвижной платформы при заданных длинах ног. Для обратного анализа наоборот: заданы положение и ориентация платформы, необходимо определить длины ног. Используется обратный кинематический анализ. Для обратного анализа параллельного манипулятора две декартовы системы координат A(x,y,z) и В(x,y,z), прикрепляются к зафиксированной базе и движущейся платформе соответственно, как показано на рисунке. Движение от движущейся платформы к базе может описываться положением вектора р центра Р и матрицей вращения движущейся платформы.
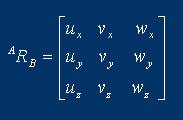
Пусть u,v, и w – это три единичные вектора, расположенные вдоль осей u,v, и w движущейся координатной системы. Тогда матрица вращения может быть представлена в виде:
Длина i-ого соединения вычисляется скалярным произведением вектора AB на самого себя:

Это уравнение, записанное шесть раз для каждой ноги i = 1,2,…6, дает шесть уравнений, описывающие положение движущейся платформы относительно базы. Для обратной кинематической задачи заданы положение вектора р и матрица вращения системы В относительно А и необходимо найти длины соединений di i = 1,2,…6. Решение задачи очень простое: необходимо найти квадратный корень из вышепреведенного уравнения.

Следовательно, для каждого положения движущейся платформы, существует два возможных решения для каждой ноги. Однако, отрицательная длина ноги физически невыполнима.
Задача управления параллельным манипулятором состоит с том, чтобы перемещать подвижную платформу манипулятора – рабочий орган – согласно заданной траектории. Перемещение платформы осуществляется при помощи шести соединений (ног) механизма. В нашем случае имеется заданное положение и ориентация подвижной платформы, относительно базы. Для модели платформы входными переменными будут шесть сил, воздействующие на ноги, а выходными – длины и скорости ног. Традиционный метод проектирования регуляторов для САУ параллельных манипуляторов требует использования сложных дифференциальных уравнений, отображающих механические компоненты механизма. Затем необходимо решать эти уравнения, что является непростой задачей. Этого можно избежать, используя программное обеспечение, моделирующее механические объекты. Для моделирования механической части будет использоваться MATLAB/ SimMechanics, а для моделирования регулятора – Simulink. Для начала необходимо создать механическую модель параллельного манипулятора. Механическая часть манипулятора состоит из неподвижной платформы – базы, подвижной платформы и шести соединений (ног), соединяющие эти платформы. Ноги состоят из двух тел, соединенных цилиндрическими соединениями. Верхняя и нижняя части каждой ноги (в дельнейшем будем называть их верхняя и нижняя нога) прикрепляются к платформам карданными соединениями. Для имитации неподвижной платформы используется блок Ground. Этот блок соединяется с блоком карданного соединения, которому с другой стороны прикрепляется блок, имитирующий механическое тело. Таким образом, получается нижняя нога. Аналогичным образом получаем верхнюю ногу, однако прикрепляем ее к подвижной платформе. Затем при помощи цилиндрического соединения объединяются обе ноги. Для моделирования движения ноги используется блок Joint Actuator, на вход которого подается сформированный управляющий сигнал от регулятора. При помощи блока Joint Sensor измеряется скорость и положение ноги. Все элементы модели ноги объединяются в один блок, т.е. формируется подсистема. Теперь можно собирать в SimMechanics механическую модель всего параллельного манипулятора:
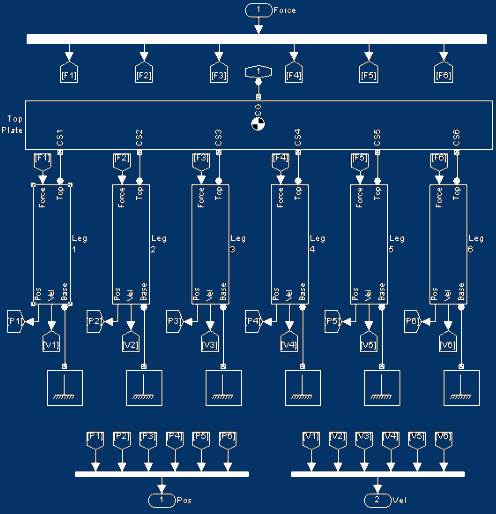
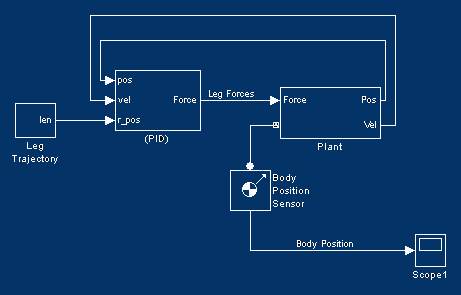
Рассмотрим эту модель. Управляющее воздействие, формируемое регулятором, подается на демультиплексор, имеющий шесть выходов. Сигналы с этих выходов являются входными сигналами для блоков Joint Actuator каждой ноги. Все шесть ног воздействуют на подвижную платформу – блок Top Plate. Подсистема каждой ноги имеет два выходных сигнала: положение и скорость. Они являются сигналами обратной связи для регулятора. Таким образом, мы получили модель параллельного манипулятора. Данная модель также оформляется в виде подсистемы. Главным назначением регулятора в системе управления параллельным манипулятором является определение траектории подвижной платформы при переводе ее в заданное положение. Эта траектория затем преобразовывается в желаемые траектории ног, используя обратный кинематический анализ. Наконец, регулятор формирует задающее воздействие для каждой ноги, чтобы следовать желаемой траектории. В качестве регулятора возьмем ПИД- регулятор. Его входами являются текущие положение и скорость, а также желаемое положение ног. Cобираем модель системы управления и объекта управления из полученных подсистем. Эта системе изображена на следующем рисунке:
Параллельные манипуляторы имеют следующие преимущества перед последовательными: более высокая жесткость системы, лучшая грузоподъемность и меньшая инерция. К недостаткам параллельных роботов следует отнести меньшее рабочее пространство по сравнению с последовательными и более сложную конструкцию механизма. Однако наряду с указанными преимуществами МПКС по сравнению с классическими роботами имеют худшее соотношение рабочего пространства и габаритов самого робота, а также, зачастую, очень ограниченные углы поворота рабочего органа. Кроме того, в процессе работы манипулятора возникают так называемые «особые положения», в которых соединения манипулятора могут пересекаться, что может привести к выходу из строя аппарата. Поэтому, система управления такого манипулятора должна не только обеспечивать требования по быстродействию, перерегулированию и т.п., но и избегать особых положений. Область применения механизмов с параллельными кинематическими связями очень широка: современные многокоординатные фрезерные и сверлильные станки, симуляторы летательных аппаратов, регулируемые шарнирные фермы, машины для шахт, самописцы т.д. Масштабируемость МПКС позволяет легко строить на их основе крупногабаритные станки. Высокие скорости и большие ускорения МПКС привлекательны для создания различных промышленных роботов или платформ, например, для телескопов, лазеров, телекоммуникационных антенн или реактивных двигателей.
1. Lung-Wen Tsai. Robot Analysis: The mechanics of serial and parallel manipulators.– New York: John Wiley&Sons Inc., 1999. – 505С.
2. "Geometric Analysis of Parallel Mechanisms"; Ilian Bonev.
3. "Robust Adaptive Control of a Hexaglide Type Parallel Manipulator"; John Phil Kim, Sung-Gaun Kim, Jeha Ryu.
4. Скляренко Е.Г. "Оптимизация конструкции механизма с параллельными кинематическими связями и шестью степенями свободы."
5. "Simulink 4. Специальный справочник" В.Дьяконов- Санкт-Петербург, 2002. – 517С.
6.www.parallemic.org