









ОСОБЕННОСТИ ДИНАМИКИ ПОЛЮСОПЕРЕКЛЮЧАЕМОГО АСИНХРОННОГО ДВИГАТЕЛЯ
Горобец Н.М., студент; Борисенко В.Ф., проф., к.т.н.
(Донецкий национальный технический университет, г. Донецк, Украина)
VІII Міжнародна науково-технічна конференція аспірантів і студентів в м. Донецьку "Автоматизація технологічних об’єктів та процесів. Пошук молодих", Донецьк, ДонНТУ, 2008.
В настоящее время широкое распространение получили механизмы, для которых в качестве приводного используют двухскоростные асинхронные машины( прежде всего – это лифты, шахтные скребковые конвейеры и т.д.). Одним из важных вопросов при эксплуатации таких систем является выбор момента переключения при переходе с нижней скорости на верхнюю и наоборот, что может существенно сказаться на величине электромагнитного момента и, как следствие, повлиять на характер переходных процессов и динамические нагрузки электромеханической системы (ЭМС).
Исследования динамики ЭМС с целью выбора рационального момента переключения были проведены на модели ЭМС с приводным асинхронным двухскоростным двигателем. Моделирование осуществлялось с использованием пакета Matlab (расширение Simulink).
На рис.1 приведена модель ЭМС с двухскоростным асинхронным двигателем. Особенностью модели является формирование двух независимых источников напряжения, которые в зависимости от положения ключа К1 могут подключаться в качестве источников питания к модели двигателя, работающего соответственно на обмотке малой или большой скорости.
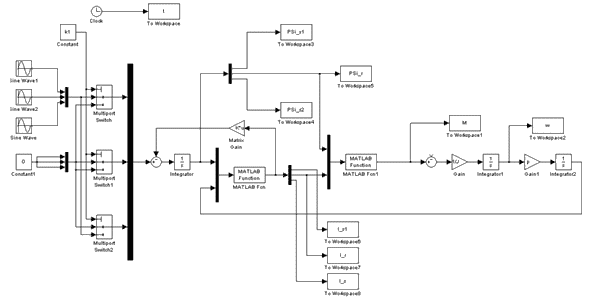
Рисунок 1 – Модель асинхронного двухскоростного двигателя в математическом пакете Matlab
При составлении модели ЭМС нами использовалось представление системы уравнений в матричном виде. Это позволило нам упростить общий вид модели, используя готовые структурные блоки звеньев и элементов.
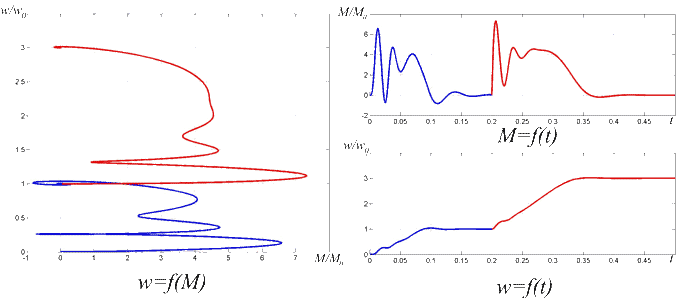
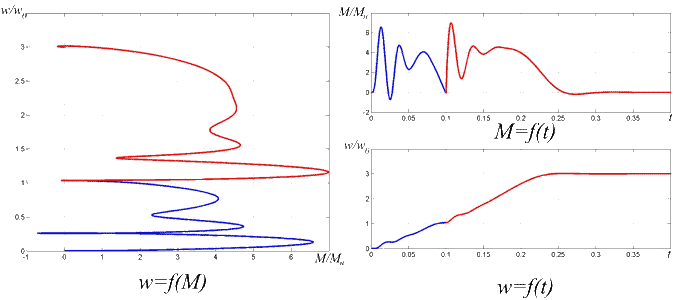
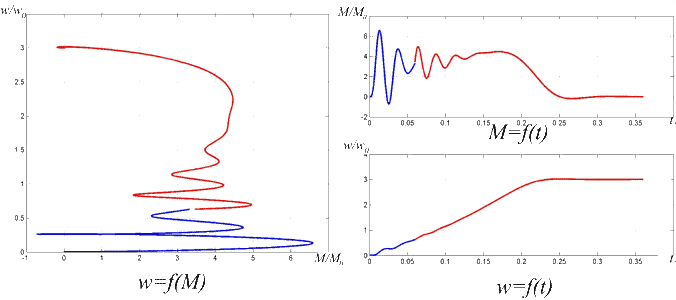
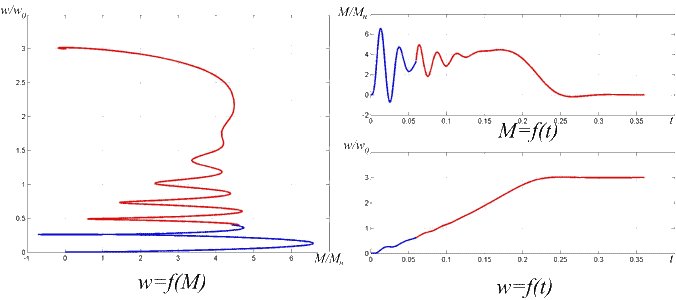
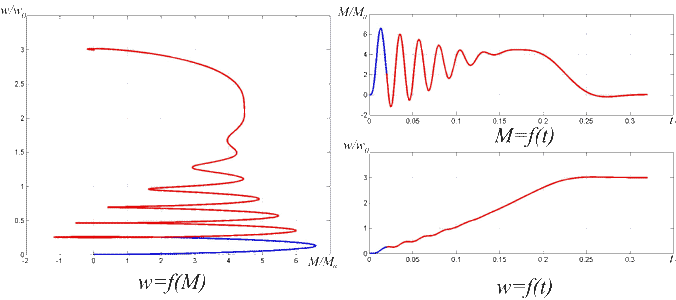
На рис. 2 приведены расчетные графики переходных процессов ЭМС в относительных единицах, а также динамические механические характеристики двигателя, позволившие в сравнении оценить пики электромагнитного момента, колебания угловой частоты вращения. Очевидно, что наиболее приемлемыми будут точки перехода соответствующие зоне критических скольжения и момента двигателя(рис. 2,в) и 2,г)).
a)
б)
в)
г)
д)
Рисунок 2 – Переходные процессы и динамические механические характеристики
Контроль выбора точки переключения в реальной схеме будет осуществляться с помощью микропроцессорного устройства. Такая схема переключения позволит снизить динамические нагрузки в механических передающих звеньях и исполнительных органах
Перечень ссылок
1. Соколов М.М., Петров Л.П, Масандилов Л.Б., Ладензон А.Б Электромагнитные переходные процессы в асинхронном двигателе. М.:Энергия, 1971, - 243с.