









ПРОЕКТ СИСТЕМЫ УПРАВЛЕНИЯ УЧЕБНЫМ ЛАБОРАТОРНЫМ СТЕНДОМ КРАНОВОГО МЕХАНИЗМА ОТ ИНТЕЛЛЕКТУАЛЬНОГО РЕЛЕ ZELIO LOGIC
Горобец Н.М., студент; Коротков А.В., ассистент
(Донецкий национальный технический университет, г. Донецк, Украина)
ОПИСАНИЕ МЕХАНИЧЕСКОЙ ЧАСТИ ЛАБОРАТОРНОГО СТЕНДА
Электрические краны являются весьма распространенными механизмами. Они применяются практически во всех отраслях промышленности. Эти механизмы на строящихся предприятиях устанавливаются первыми, выполняя роль монтажных средств, затем участвуют в действующем производстве и в основном технологическом процессе. Поэтому весьма важной задачей является изучение студентами фактических режимов работы технологической установки с тем, чтобы электрические системы наиболее полно соответствовали конкретному механизму.
Лабораторный стенд имитирующий режимы работы крана состоит из двух частей механическая(мостовой кран) и электрическая (шкаф управления).
На рисунке 1 представлена кинематическая схема мостового крана:
Мост 2 крана выполнен из стандартного профиля, по которому сверху перемещается тележка, а снизу расположена кабина. Мост разделен отметками по 0,25м с целью проведения экспериментальных исследований.
Тележка 6 имеет приводы передвижения и подъема
Привод передвижения состоит из электродвигателя 5 с регулируемой угловой скоростью, червячного самотормозящего редуктора 3, приводных и ходовых обрезиненных колесных пар. Благодаря самотормозящему редуктору облегчается режим работы тормозного устройства 4 на модели.
Подъемная лебедка расположена снизу передвижной тележки (для компактности) и состоит из барабана 15 с намотанным канатом 13, имеющим на конце грузозахватывающее устройство 14, и двигателя со встроенным редуктором 17.
Тележка соединена со шкафом управления 9 гибким плоским кабелем с натяжным устройством 8, препятствующим провисанию кабеля. Ход тележки в крайних положениях ограничивается конечными выключателями 11, расположенными на мосту, а ход вверх выключателем 12 на тележке.
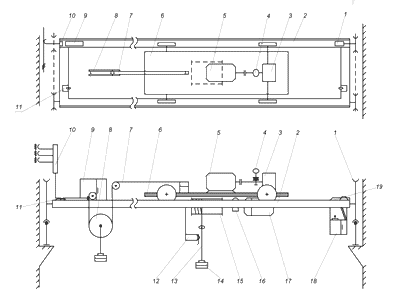
Рисунок 1 - Кинематическая схема стенда
В реальных цеховых установках имеется еще и привод передвижения 1 моста, а для подвода напряжения питания к мосту применяется специальный токосъемный узел 10.
Важный элемент крана – кабина управления 18, в которой сосредоточены органы управления всеми электроприводами. Для проведения профилактических работ на электрооборудовании и механизмах крана предусматривается люк 19, через который и осуществляется выход из кабины на мост обслуживающего персонала. Здесь имеется также блокировочный выключатель, контролирующий закрытое состояние люка.
Грузозахватывающее устройство 14 может иметь разновидности: крюк, электромагнит, грейфер.
Шкаф управления выполнен в натуральную величину, внутри которого смонтирована электрическая схема управления приводами подъема и передвижения тележки, схема защиты, звуковая сигнализация, органы и пульт управления краном. С другими электрическими узлами, расположенными на передвижной тележки и на мосту, шкаф соединен кабелем.
ОПИСАНИЕ ЭЛЕКТРИЧЕСКОЙ ЧАСТИ
Электрическая часть стенда представлена шкафом управления с размещенной в ней системой управления. На рисунке 2 представлена система управления и силовая часть стенда.
Подача напряжения на схему управления и силовую схему осуществляется включением выключателей в силовом шкафу лаборатории. Затем в шкафу управления включается вручную автоматические выключатели QF1 и QF2.
Если все механизмы находятся в исходном состоянии то при нажатии кнопки SA1.1 на пульте управления включается реле KV1 цепи защиты.
Передвижение тележки влево осуществляется нажатием кнопки SA2, при этом включается реле KV2 и подает напряжение на двигатель М1.
Передвижение тележки вправо обеспечивается аналогично элементами SA3 и KV3.
При необходимости остановки тележки нажимают кнопку «Cтоп» SA6.
В крайнем левом и правом положениях отключение тележки осуществляют концевые выключатели SQ2 и SQ3 соответственно.
Подъем груза производится соответственно включением элементов SA4, KV4, М2, пуск груза SA5, KV5, M2. Остановка лебедки производится кнопкой «Стоп» SA7.
Следует обратить внимание, что на подъемной тележки имеется концевой выключатель SQ4, ограничивающий только ход «Вверх».
Перед началом любого движения необходимо подать звуковой сигнал, для чего нажимается кнопка SA8 электрического звонка НА.
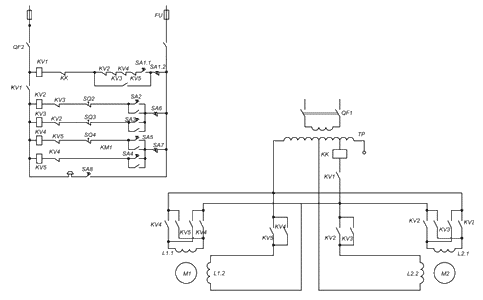
Рисунок 2 – Система управления и силовая часть стенда
МОДЕРНИЗАЦИЯ СХЕМЫ УПРАВЛЕНИЯ
В качестве микропроцессорного устройства, выполняющего функции управления было выбрано интеллектуальное реле Zelio Logic фирмы Schneider Electric ,которое удобно тем, что его входа выдерживают входное напряжение 24VDC или 250VAC и выходы которые позволяют коммутировать цепи напряжением до 250VDC и током до 8A. На рисунке 3.1 представлена разработанная схема на основе интеллектуального реле Zelio Logic.
Выбор схемы управления (релейно-контакторная или от интеллектуального реле) осуществляется вручную – включением автоматических выключателей QF1 и QF3. При этом, другая схема управления оказывается полностью обесточена. При включении QF3 происходит подача напряжения на блок питания, который выдает 24VDC для питания интеллектуального реле.
При управлении от Zelio Logic используются те же самые концевые выключатели SQ2, SQ3, SQ4 и реле максимальной защиты – КК, что и при релейной схеме. Благодаря этому не осуществляется дополнительный монтаж датчиков, не происходит загромождение рабочего поля стенда. Но это также влечет за собой некоторые сложности. Необходимо подключать и отключать соответствующую схему управления при помощи группы контактов KM1 и KM2. Иначе это может повлечь за собой нежелательные последствия, такие как короткое замыкание и шунтирование некоторых элементов.
В таблице 1 приведены соответствия между входами интеллектуального реле и соответствующими сигналами
| Вход на интеллектуальном реле Zelio Logic | Описание |
| I1 | Нажатие кнопки SA1.1 – подготовка схемы к пуску |
| I2 | Нажатие кнопки SA1.2 – отключение всей схемы управления |
| I3 | Нажатие кнопки SA2 – движение «вперед» тележки |
| I4 | Нажатие кнопки SA3 – движение «назад» тележки |
| I5 | Нажатие кнопки SA4 – наматывания лебедкой каната |
| I6 | Нажатие кнопки SA5 – разматывание лебедкой каната |
| I7 | Нажатие кнопки SA6 – прекращение движения тележки |
| I8 | Нажатие кнопки SA7 – прекращение движения лебедки |
| I9 | Нажатие кнопки SA8 – звуковое оповещение |
| IA | Вход с концевого выключателя для движения «вперед» |
| IB | Вход с концевого выключателя для движения «назад» |
| IC | Вход с концевого выключателя для наматывания лебедки |
| ID | Вход с реле максимального тока |
В таблице 2. Приведены соответствия между выходами интеллектуального реле и соответствующими сигналами
| Выход на интеллектуальном реле Zelio Logic | Описание |
| Q1 | Контактор, установленный на данном выходе, коммутирует контакты для подачи питания на силовую схему |
| Q2 | Контактор, установленный на данном выходе, коммутирует контакты для движения тележки вперед |
| Q3 | Контактор, установленный на данном выходе, коммутирует контакты для движения тележки назад |
| Q4 | Контактор, установленный на данном выходе, коммутирует контакты для наматывания каната на лебедку |
| Q5 | Контактор, установленный на данном выходе, коммутирует контакты для разматывания каната на лебедку |
| Q6 | Контактор, установленный на данном выходе, коммутирует контакты для подачи звукового сигнала |
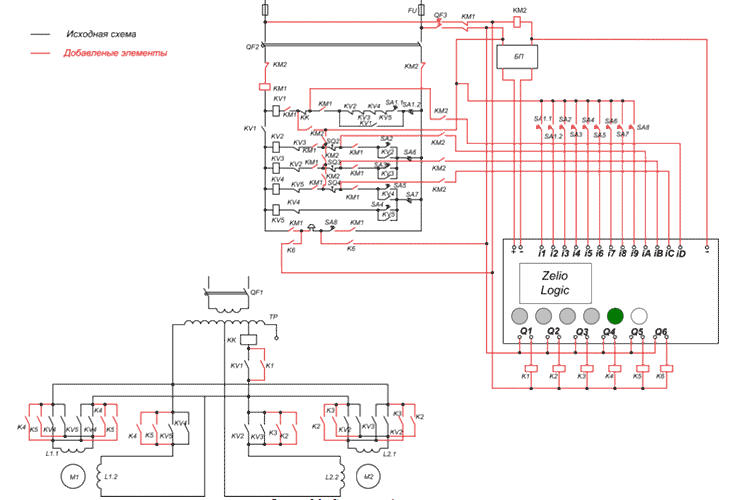
Рисунок 3 – Разработанная схема модернизации стенда
ОПИСАНИЕ ПРОГРАММЫ УПРАВЛЕНИЯ
Программа управления интеллектуальным реле представленная на рисунке 4 разработана в приложении Zelio soft на языке LADDER (релейных схем)
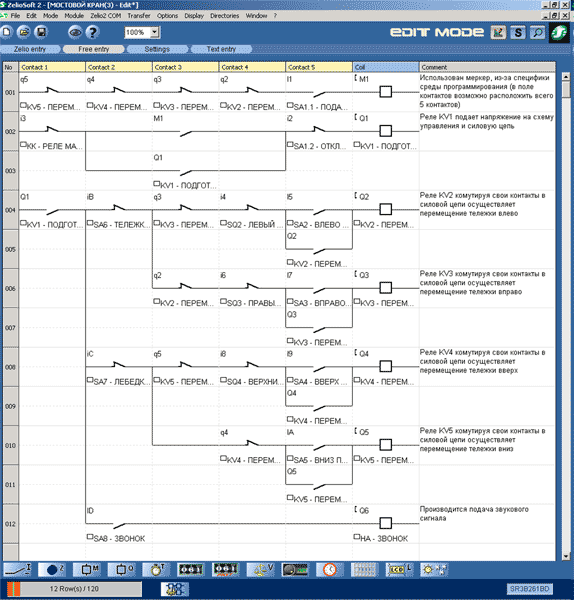
Рисунок 4 – Программа управления
ПЕРЕЧЕНЬ ССЫЛОК
- Методические указания к лабораторным работам по курсу «Автоматизированный электропривод общепромышленных механизмов» (для студентов специальности 2105) /Сост. Володин В.И. – Донецк: ДПИ, 1990. - 100с.
- Руководство пользователя «Интелектуальное реле Zelio Logic» 2006г, 32с.