









ПРОЕКТ СИСТЕМЫ УПРАВЛЕНИЯ УЧЕБНЫМ ЛАБОРАТОРНЫМ СТЕНДОМ ШПУ ОТ ИНТЕЛЛЕКТУАЛЬНОГО РЕЛЕ ZELIO LOGIC
Горобец Н.М., студент; Коротков А.В., ассистент
(Донецкий национальный технический университет, г. Донецк, Украина)
ОПИСАНИЕ МЕХАНИЧЕСКОЙ ЧАСТИ ЛАБОРАТОРНОГО СТЕНДА
Установка состоит из шахты, шкафа и пульта управления.
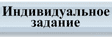
Шахта выполнена из стандартного профиля, на котором смонтированы все узлы подъемной установки. На рисунке 1 представлено кинематическая схема установки.
Подъемный сосуд выполнен в виде опрокидного скипа, рама 2 которого с помощью башмаков 8 передвигается по стальным направляющим 17. Сверху скип при помощи прицепного устройства 9 прикреплен к головному канату 20, который переброшен через направляющий шкив 10 и вторым концом закреплен на барабане 11 подъемной машины.
Внизу в корпусе шахты укреплено загрузочное устройство, желоб бункера 4 который открывается при помощи заслонки с электромагнитом и через него производится загрузка скипа.
В верху шахты укреплено разгрузочное устройство 5, в которое высыпается груз из короба 7 скипа, опрокидывающегося под действием отклоняющих кривых 6 и специального ролика на коробе.
Сбоку к шахте прикреплена специальная площадка, на которую смонтирована подъемная машина, состоящая из барабана 11, редуктора 23 и приводного двигателя 25. Для затормаживания двигателя применяется тормозное устройство: тормозные колодки 12, треугольный рычаг 13, тормозные грузы 15 и электромагнитный привод 14, служащий для растормаживания машины.
Управление установкой производится с пульта 16, а вся аппаратура размещена в шкафу 27.
Для контроля скорости машины применяется тахогенератор 26, а для контроля положения сосуда и автоматизации установки – бесконтактные датчики 1, 18, 19, 21, 22.
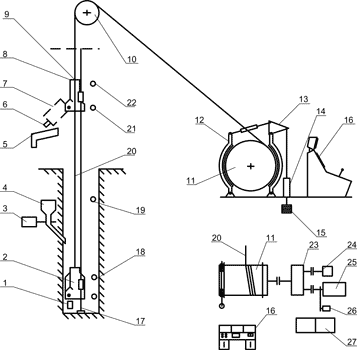
Рисунок 1 – Механическая часть ШПУ
ОПИСАНИЕ ЭЛЕКТРИЧЕСКОЙ ЧАСТИ
Схема приведенная на рисунке 2 – позволяет осуществлять два режима работы – ручной и автоматический.
Для управления в ручном режиме необходимо: переключатель «Ручное - автоматическое» на пульте в положении «Ручное».
Работа осуществляется в ручном режиме при перемещении рукоятки контроллера в заданном направлении: на себя – движение вверх, от себя – движение вниз.
Скорость движения скипа зависит от положения рукоятки – чем дальше от нулевого положения, тем больше скорость и наоборот.
При этом контакты контроллера 1SA или 2SA включают соответственно контактор «Вперед» (КМ1) или «Назад»(КМ2), с помощью которых подается напряжение питания на приводной двигатель М1 при полностью введенном сопротивлении R1 - R3. Затем по мере перемещения рукоятки включается последовательно контакты SA1 - SA4 контролера в цепи контакторов ускорения 1КМ-4КМ. При включении КМ1 или КМ2 подается команда на отсчет времени КТ1. По истечении его выдержки времени t1 замыкается цепь контактора 1КМ, который своими замыкающими контактами шунтирует резистор R1 первой ступени реостата. Двигатель переходит на следующую искусственную характеристику.
Одновременно подается команда на отсчет выдержки времени работы на второй ступени путем отключения реле времени КТ2 по цепи размыкающих контактов 1КМ – 2КМ – 3КМ – 4КМ и так далее до выхода двигателя на естественную характеристику.
Автоматическое управление осуществляется переводом установки в этот режим на пульте управлении.
Работа в автоматическом режиме осуществляется в следующем порядке. Нажатием кнопке А3 на пульте производят загрузку скипа. Дальше «Пуск в авт.» - установка приводится в движение.
Включается реле KV6. Своим контактом оно включает контактор «Вперед»(КМ1) и схема работает как выше. При этом путь от первого концевика до второго установка работает только на первой скорости. После прохода датчика SQ2 производится разгон до второй скорости. После прохода датчика SQ3 произойдет размыкание цепь контактов 2КМ - 4КМ и двигатель перейдет на пониженную скорость. После происходит опрокидывание скипа с помощью направляющих кривых, при достижении верхнего нормального положение срабатывает датчик SQ4, включает реле KV4, которое отключает двигатель.
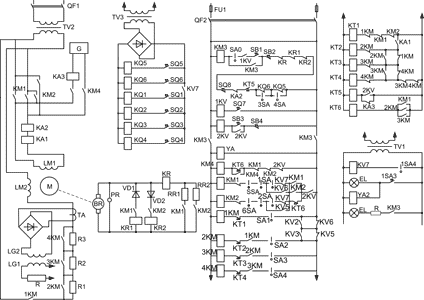
Рисунок 2 – Релейная схема управления ШПУ
ОПИСАНИЕ СИСТЕМЫ УПРАВЛЕНИЯ ОТ ИНТЕЛЛЕКТУАЛЬНОГО РЕЛЕ ZELIO LOGIC
В качестве микропроцессорного устройства, выполняющего функции управления было выбрано интеллектуальное реле Zelio Logic фирмы Schneider Electric,которое удобно тем, что его входа выдерживают входное напряжение 24VDC или 250VAC и выходы которые позволяют коммутировать цепи напряжением до 250VDC и током до 8A. На рисунке 3 представлена разработанная схема на основе интеллектуального реле Zelio Logic.
Выбор схемы управления (релейно-контакторная или от интеллектуального реле) осуществляется вручную – включением автоматических выключателей QF1 и QF3. При этом, другая схема управления оказывается полностью обесточена. При включении QF3 происходит подача напряжения на блок питания, который выдает 24VDC для питания интеллектуального реле.
При управлении от Zelio Logic используются те же самые концевые выключатели датчики, что и при релейной схеме. Благодаря этому не осуществляется дополнительный монтаж датчиков, не происходит загромождение рабочего поля стенда. Но это также влечет за собой некоторые сложности. Необходимо подключать и отключать соответствующую схему управления при помощи группы контактов KM1 и KM2. Иначе это может повлечь за собой нежелательные последствия, такие как короткое замыкание и шунтирование некоторых элементов.
На рисунке 3 приведено схема модернизации стенда
Рисунок 3 – Разработанная схема модернизации стенда
ПЕРЕЧЕНЬ ССЫЛОК
- Методические указания к лабораторным работам по курсу «Автоматизированный электропривод общепромышленных механизмов» (для студентов специальности 2105) /Сост. Володин В.И. – Донецк: ДПИ, 1990. - 100с.
- Руководство пользователя «Интелектуальное реле Zelio Logic» 2006г, 32с.