









ПРОЕКТ УЧБОВОГО ЛАБОРАТОРНОГО СТЕНДА КЕРУВАННЯ КРАНОВИМ МЕХАНІЗМОМ ВІД ІНТЕЛЕКТУАЛЬНОГО РЕЛЕ ZELIO LOGIC
Горобец М.М.,студент; Коротков А.В., асистент
(Донецький Національний Технічний Університет, м. Донецьк, Україна)
Всеукраїнський конкурс студентських наукових робіт 2007/2008 навчального року зі спеціальності «Електромеханічні системи автоматизації та електропривод», Дніпродзержинськ, ДДТУ, 2008.
АНОТАЦІЯ
Актуальність роботи. Перед багатьма підприємствами постала важлива проблема - модернізація існуючого технологічного обладнання. До основних завдань у цій області ставиться: підвищення технологічного рівня обладнання, розширення технологічних можливостей, підвищення експлуатаційної надійності, додання обладнанню інтелектуальних функцій керування, максимальна ергономіка й зручність керування. Усіма вище наведеними властивостями володіють сучасні промислові мікропроцесорні пристрої. Тому розроблений проект стенду управління моделю промислового механізму від інтелектуального реле є дуже актуальним в теперішній час.
Мета та задачі роботи: Розробка лабороторного стенду з системою керування на базі інтелектуального реле Zelio Logic. Задачи роботи – розробка принципових та монтажних схем стенду, розробка програми керування.
Об'єкт розробки – учбовий лабораторний стенд.
Предмет розробки - система керування моделю промислового механізму від інтелектуального реле Zelio Logic.
Загальна характеристика наукової роботи. Робота складається зі вступу, 4 розділів і висновків. Загальний обсяг роботи становить 21 сторінок, робота містить 3 таблиці, 9 рисунків і список літератури з 4 найменувань.
СИСТЕМА КЕРУВАННЯ, МІКРОПРОЦЕСОРНИЙ ПРИСТРІЙ, ІНТЕЛЕКТУАЛЬНЕ РЕЛЕ, ПРОГРАМНЕ ЗАБЕЗПЕЧЕНННЯ, ЯЗИК ПРОГРАМУВАННЯ, МОДЕЛЬ МЕХАНІЗМУ.
ВСТУП
Кожне промислове підприємство під час процесу виготовлення якоїсь продукції використовує велику кількість різноманітних промислових механізмів, багато з яких працює вже більш ніж два десятка років, фізично та морально застаріло. Тому в наш час дуже ретельно стоїть питання модернізації або заміни існуючих релейних систем керування сучасними промисловими мікропроцесорними системами. Але впровадження нової мікропроцесорної техніки потребує і нових знань та умінь обслуговуючого персоналу. Для чого в учбовому процесі також проходить модернізація або розробка нових стендів з використанням сучасної мікропроцесорної техніки, методик роботи на них, вивчення сучасних пакетів програм програмування промислових контролерів та програм для моніторингу стану обладнання.
АНАЛІТИЧНИЙ ОГЛЯД
Кафедра «Електромеханічні системи автоматизації та електропривод», для практичних робот з багатьох дисциплін, а саме «Спеціальний електропривод», «Системи керування електроприводом», «Мікропроцесорні пристрої», «Комплектні електропривода» та «Промислові системи керування» має лабораторії де присутні стенди моделей промислових механізмів. Але існуюче обладнання не задовольняє сучасному рівню розвитку науки та промислового обладнання. Релейно-контакторні схеми керування, що й досі використовуються, морально та фізично встаріли крим того займають багато місця, не є ергономічними й потредують багато часу при перебудові.
Все це стало підставою для подальших розробок в сфері модернизації й виготовлення нового стендового лабороторного обладнання, яке могло би бути використане в учбовому процесі.
1 ОПИС МЕХАНІЧНОЇ ЧАСТИНИ ЛАБОРАТОРНОГО СТЕНДА
Електричні крани є досить розповсюдженими механізмами. Вони застосовуються практично у всіх галузях промисловості. Ці механізми на споруджуваних підприємствах установлюються першими, виконуючи роль монтажних засобів, потім беруть участь у діючому виробництві й в основному технологічному процесі. Тому досить важливим завданням є вивчення студентами фактичних режимів роботи технологічної установки для того, щоб електричні системи найбільше повно відповідали конкретному механізму.
Лабораторний стенд, що імітує режими роботи крана складається із двох частин механічна(мостовий кран) і електрична (шафа керування).
На рисунку 1.1 представлена кінематична схема мостового крана:
Мост 2 крана виконаний зі стандартного профілю, по якому зверху переміщається візок, а знизу розташована кабіна. На мост нанесені поділки по 0,25м з метою проведення експериментальних досліджень.
Візок 6 має приводи пересування й підйому.
Привод пересування складається з електродвигуна 5 з регульованою кутовою швидкістю, черв'ячного самогальмуючого редуктора 3, приводних і ходових колісних пар, які мають гумове покриття. Завдяки самогальмуючому редуктору полегшується режим роботи гальмового пристрою 4 на моделі.
Піднімальна лебідка розташована знизу пересувного візка (для компактності) і складається з барабана 15 з намотаним канатом 13, що має на кінці вантажозахватний пристрій 14, і двигуна з вбудованим редуктором 17.
Візок з'єднаний із шафою керування 9 гнучким плоским кабелем з натяжним пристроєм 8, що перешкоджає провисанню кабелю. Хід візка в крайніх положеннях обмежується кінцевими вимикачами 11, розташованими на мосту, а хід нагору вимикачем 12 на візку У реальних цехових установках є ще й привод пересування 1 моста, а для підведення напруги живлення до моста застосовується спеціальний струмоз’ємний вузол 10.
Важливий елемент крана – кабіна керування 18, у якій зосереджені органи керування всіма електроприводами. Для проведення профілактичних робіт на електроустаткуванні й механізмах крана передбачається люк 19, через який і здійснюється вихід з кабіни на міст обслуговуючого персоналу. Тут є також блокувальний вимикач, що контролює закритий стан люка.
Вантажозахватний пристрій 14 може мати наступні різновиди: гак, електромагніт, грейфер.
Шафа керування виконана в натуральну величину, усередині якого змонтована електрична схема керування приводами підйому й пересування візка, схема захисту, звукова сигналізація, органи й пульт керування краном. З іншими електричними вузлами, розташованими на пересувному візку й на мосту, шафа з'єднана кабелем.
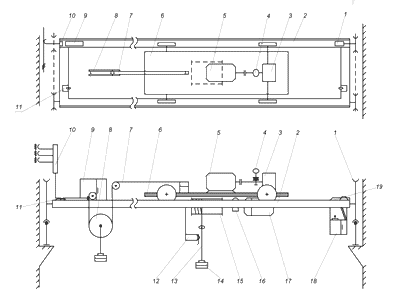
Рисунок 1.1-Кінематична схема стенда
2 ОПИС СИСТЕМИ КЕРУВАННЯ
Електрична частина стенда представлена шафою керування з розміщеної в ній системою керування. На рисунку 2.1. представлена система керування й силова частина стенда.
Подача напруги на схему керування й силову схему здійснюється включенням вимикачів у силовій шафі лабораторії. Потім у шафі керування включаються вручну автоматичні вимикачі QF1 й QF2.
Якщо всі механізми перебувають у початковому стані то при натисканні кнопки SA1.1 на пульті керування включається реле KV1 ланцюга захисту.
Пересування візка вліво здійснюється натисканням кнопки SA2, при цьому вмикається реле KV2 і подається напруга на двигун М1.
Пересування візка вправо забезпечується аналогічно елементами SA3 й KV3.
При необхідності зупинки візка натискається кнопка «Стоп» SA6.
У крайньому левом і правом положеннях відключення візка здійснюють кінцеві вимикачі SQ2 й SQ3 відповідно.
Підйом вантажу виконується відповідно включенням елементів SA4, KV4, М2, спуск вантажу SA5, KV5, M2. Зупинка лебідки виконується кнопкою «Стоп» SA7.
Варто звернути увагу, що підіймання візка обмежено кінцевий вимикач SQ4, що обмежує тільки хід «Нагору».
Перед початком будь-якого руху необхідно подати звуковий сигнал, для чого натискається кнопка SA8 електричного дзвінка НА.
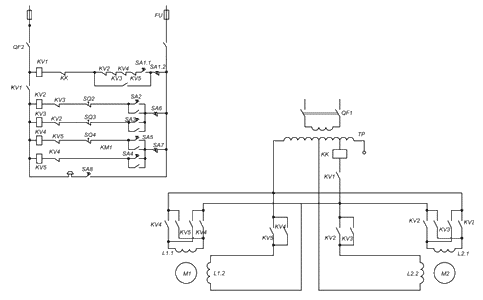
Рисунок 2.1-Система керування й силова частина стенда
3 ПРОЕКТ МОДЕРНІЗАЦІЇ СИСТЕМИ КЕРУВАННЯ
В якості мікропроцесорного пристрою, що виконує функції керування, було обране інтелектуальне реле Zelio Logic фірми Schneider Electriс ,що зручно тим, що його входи витримують вхідну напругу 24VDC або 250VAC і виходи дозволяють комутирувати електричні ланцюги напругою до 250VАС і струмом до 8A. На рисунку 3.1 представлена схема запропонованої модернізації лабораторного стенда на основі інтелектуального реле Zelio Logic. До існуючої релейно-контакторної схеми керування була додана схема керування від програмуємого інтелектуального реле Zelio Logic.
Вибір схеми керування (релейно-контакторна або від інтелектуального реле) здійснюється вручну – включенням автоматичних вимикачів QF1 й QF3. При цьому, інша схема керування виявляється повністю знеструмлена. При включенні QF3 відбувається подача напруги на блок живлення, що видає 24VDC для живлення інтелектуального реле.
При керуванні від Zelio Logic використаються ті ж самі кінцеві вимикачі SQ2, SQ3, SQ4 і реле максимального захисту – КК, що й при релейній схемі. Завдяки цьому не здійснюється додатковий монтаж датчиків, не відбувається захаращення робочого поля стенда. Але це також спричиняє деякі складності. Необхідно підключати й відключати відповідну схему керування за допомогою групи контактів KM1 й KM2. Інакше це може викликати небажані наслідки, такі як коротке замикання й шунтування деяких елементів.
Схема керування від інтелектуального реле має свій власний комплект кнопок керування (SA1-SA8). Їхні позначення й виконувані функції збігаються з відповідними кнопками й функціями у релейній схемі керування.
У таблиці 3.1 наведені відповідності між входами інтелектуального реле й відповідними сигналами.
| Вхід на інтелектуальному реле Zelio Logic | Опис |
| I1 | Натискання кнопки SA1.1 – підготовка схеми до пуску |
| I2 | Натискання кнопки SA1.2 – відключення всієї схеми керування |
| I3 | Натискання кнопки SA2 – рух «уперед» візка |
| I4 | Натискання кнопки SA3 – рух «назад» візка |
| I5 | Натискання кнопки SA4 – намотування лебідкою каната |
| I6 | Натискання кнопки SA5 – розмотування лебідкою каната |
| I7 | Натискання кнопки SA6 – припинення руху візка |
| I8 | Натискання кнопки SA7 – припинення руху лебідки |
| I9 | Натискання кнопки SA8 – звукове оповіщення |
| IA | Вхід з кінцевого вимикача для руху «уперед» |
| IB | Вхід з кінцевого вимикача для руху «назад» |
| IC | Вхід з кінцевого вимикача для намотування лебідки |
| ID | Вхід з реле максимального струму |
На виходах інтелектуального реле встановлена група контактів (K1-K6), які й виконують комутації в силовому ланцюзі. Це зроблено з тією метою, щоб у режимі керування від релейно-контакторної схеми (коли відключене інтелектуальне реле) на виходах Zelio Logic не було потенціалу.
У таблиці 3.2 наведені відповідності між виходами інтелектуального реле й відповідними сигналами
| Вихід на інтелектуальному реле Zelio Logic | Опис |
| Q1 | Контактор, установлений на даному виході, комутирує контакти для подачі живлення на силову схему |
| Q2 | Контактор, установлений на даному виході, комутирує контакти для руху візка вперед |
| Q3 | Контактор, установлений на даному виході, комутирує контакти для руху візка назад |
| Q4 | Контактор, установлений на даному виході, комутирує контакти для намотування каната на лебідку |
| Q5 | Контактор, установлений на даному виході, комутирує контакти для розмотування каната на лебідку |
| Q6 | Контактор, установлений на даному виході, комутирує контакти для подачі звукового сигналу |
В таблиці 3.3 – перечислені додані до схеми керування елементи
| Позначення на схемі | Опис |
| Zelio Logic | Интеллектуальное реле Zelio Logic, основний елемент розробленої схеми керування |
| QF2 | Автоматичний вимикач, для подачи напруги на блок живлення інтелектуального реле |
| КМ1 | Контактор встановлений у ланцюгу релейно-контакторної схеми керування, для виключення можливості вімкнення схеми керування від інтелектуального реле |
| КМ2 | Контактор встановлений у ланцюгу схеми живлення інтелектуального реле, для виключення можливості вімкнення релейно-контакторної схеми керування |
| К1 | Контактор, для підключення силової схеми до мережі живлення |
| К2 | Контактор, для подачи живлення на двигун для пересуванні візка «уперед» |
| К3 | Контактор, для подачи живлення на двигун для пересуванні візка «назад» |
| К4 | Контактор, для подачи живлення на двигун для розмотування лебідкою канату |
| К5 | Контактор, для подачи живлення на двигун для намотування лебідкою канату |
| К6 | Контактор, для подачі живлення на дзвоник |
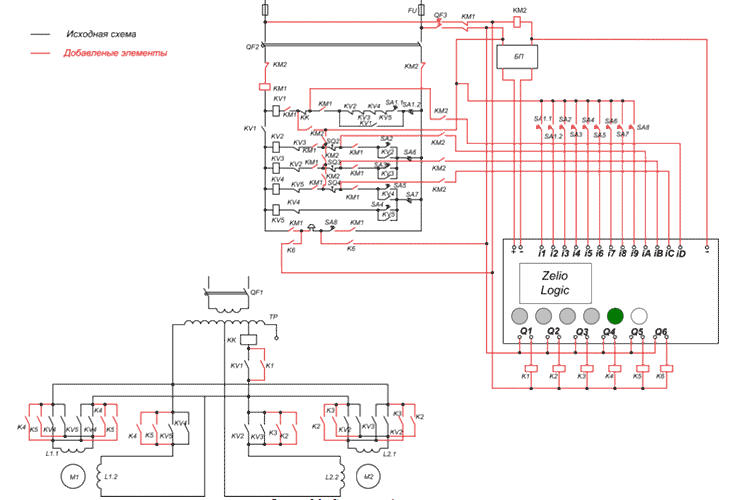
Рисунок 3.1 - Схема модернізованого стенда
4 ОПИС СЕРЕДОВИЩА ПРОГРАМУВАННЯ ІНТЕЛЕКТУАЛЬНОГО РЕЛЕ ZELIO LOGIC ТА ПРОГРАМИ КЕРУВАННЯ
Програма керування інтелектуальним реле розроблена в додатку Zelio soft. Це спеціалізоване середовище для програмування всіх типів інтелектуальних реле Zelio Logic компанії Schneider Electriс.
Створення нового проекту в додатку починається з вибору типу інтелектуального реле. На рисунку 4.1 наведений цей крок.
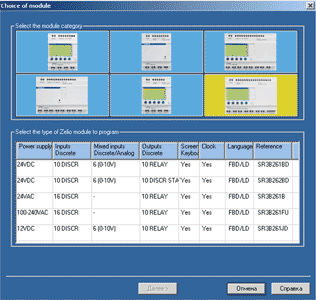
Рисунок4.1 - Вибір типу інтелектуального реле
Після вибираються мова програмування інтелектуального реле: релейно-контакторна – LADDER або функціональних блоків – FBD. На рисунку 4.2 наведене вікно вибору мови програмування.
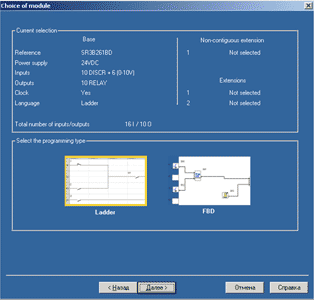
Рисунок 4.2 - Вікно вибору мови програмування
Залежно від обраного типу мови програмування з'являється відповідне вікно поля набору програми. На рисунку 4.3 представлені відповідні поля набору.
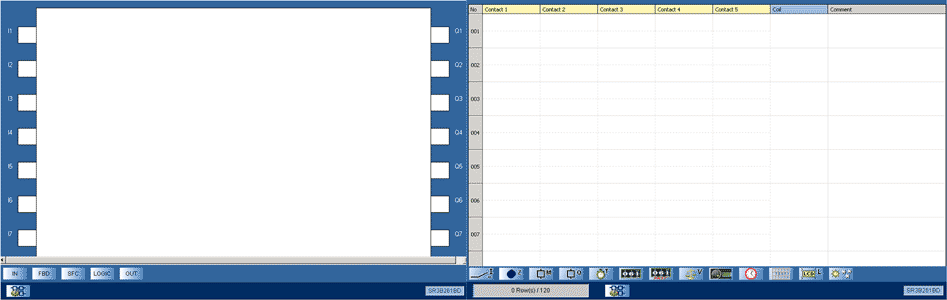
Рисунок 4.3 Поле набору елементів у FBD - а) й LADDER -б) відповідно
У нижній частині кожного з поля набору є бібліотеки елементів, з яких й набираються програми.
На рисунку 4.4 представлена програма керування інтелектуальним реле для стенда «Крановий механізм», з відповідними коментарями.
Для більшої відповідності та порівняння з початковою схемою керування вона написана мовою релейних схем - LADDER.
Після створення програми є можливість промоделювати написану програму. Для цього у вкладці «Mode» вибирається режим «Modulation». Програма переходить у режим моделювання, у якому можна переглянути роботу програми. На рисунку 4.5 наведений уривок програми керування інтелектуальним реле для стенда «Крановий механізм».
Також у режимі моделювання можна переглянути стани входів і виходів. На рисунку 4.6 показані вікна стану входів і виходів.
Таким чином даний програмний продукт є дуже зручним при використанні в учбовому процесі.
Для програмування інтелектуального реле використовується звичайний персональний комп’ютер та кабель, який з’єднує персональний комп’ютер через послідовний порт з Zelio Logic.
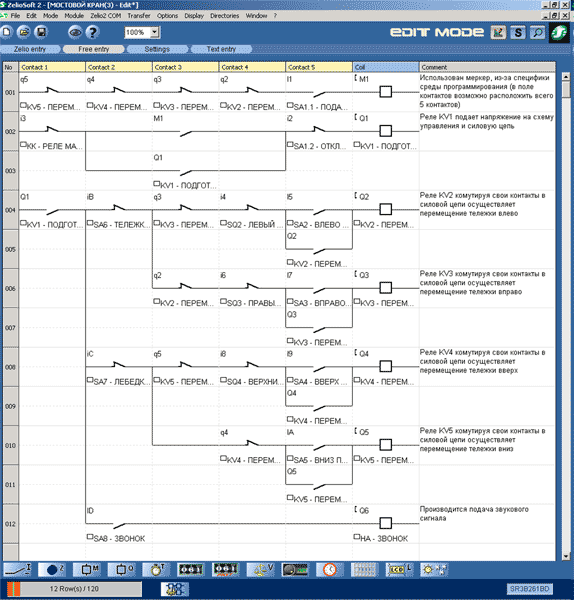
Рисунок 4.4 - Програма керування інтелектуальним реле
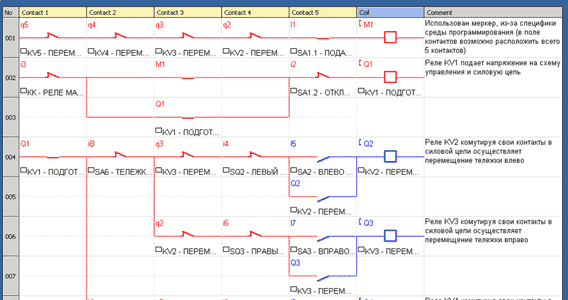
Рисунок 4.5 - Уривок програми керування інтелектуальним реле для стенда «Крановий механізм»
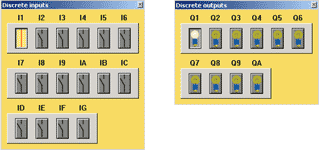
Рисунок 4.6 - Вікна стану входів і виходів інтелектуального реле задіяних у програмі(відповідно)
ВИСНОВКИ
В даній роботі було розглянуто проект модернізації учбового лабораторного стенду. Було зроблено опис механічної та електричної частини стенда та запропоновано додаткову систему керування від інтелектуального реле. Було розглянуто середовище програмування інтелектуального реле та представлено програма керування інтелектуальним реле.
Даний модернізований може використовуватися в наступних практичних цілях:
- Вивчення фактичні режими роботи кранових механізмів;
- Вивчення навиків монтажу сучасного електричного обладнання;
- Отримання практичнх навиків застосування мікропроцесорної техніки;
- Вивчення на основі інтелектуального реле Zelio Logic і середовища програмування Zelio Soft основ мікропроцесорної техніки та принципів її програмування;
- Вивчення основних графічних засобів програмування – мови релейних схем і функціональних блоків – LADDER й FBD (відповідно);
Цей стенд може використовуватися як практичне приладдя в ряді дисциплін, які читає кафедра «Електромеханічні системи автоматизації та електропривод» для студентів спеціальностей (06.092203, 07.092203, 08.092203), а саме «Спеціальний електропривод», «Мікропроцесорні пристрої», «Системи керування електроприводом», «Комплектний електропривод» та «Промислові системи керування».
ПЕРЕЛІК ПОСИЛАНЬ
- Методические указания к лабораторным работам по курсу «Автоматизированный электропривод общепромышленных механизмов» (для студентов специальности 2105) /Сост. Володин В.И. – Донецк: ДПИ, 1990. - 100с.
- Руководство пользователя «Интелектуальное реле Zelio Logic» 2006г, 32с.