 |
Криволапов Павел ПавловичЭлектротехнический факультетКафедра электропривод и автоматизация промышленных установокСпециальность: Электромеханические системы автоматизации и электроприводТема выпускной работы:Исследование современных систем электропривода с двухзонным регулированием скоростиНаучный руководитель: Толочко Ольга Ивановна |
Исследование современных систем электропривода с двухзонным регулированием скорости
Введение
Актуальность темы. Достижения в области силовой электроники и микропроцессорной техники дают новые возможности распространению регулируемого электропривода. Высокая скорость обработки информации современными процессорами дала толчок развитию старых и разработке новых алгоритмов управления системой «преобразователь-двигатель». Двухзонное регулирование используется прежде всего в тех механизмах, статический момент которых с ростом скорости уменьшается (механизмы вращения шпинделя металлорежущих станков, некоторые прокатные станы, наматывающие механизмы и др.), это дает возможность, в сравнении с однозонными приводами, полностью использовать мощность двигателя, ведь при увеличении скорости мощность двигателя будет возрастать и, соответственно, будет возрастать мощность преобразователя, что весьма увеличивает их стоимость. Использование двухзонного регулирования связано, прежде всего, с требованием повышения скорости обработки изделий и тем самым повышения производительности, а, следовательно, и прибыли. Систему двухзонного регулирования можно рассматривать не только в приводах постоянного тока с двигателями независимого возбуждения, но и в приводах переменного тока с асинхронными двигателями при векторном и скалярном управлении, также режим двухзонного регулирования может быть реализован и в приводе с вентильным двигателем.
Цель работи: изучение и описание систем двухзонного регулирования скорости, исследование динамических свойств различных вариантов схем регулирования.
Задача: выполнить сравнительный анализ систем двухзонного регулирования скорости методом математического моделирования, разработать рекомендации по их применению, построение наблюдателя для выделения сигнала скорости в двухзонной системе.
Исследованием этой теми в ДонНТУ занимались: Толочко О.И., Коцегуб П.Х. [1-4].
Эта тема очень распространена, поэтому ее изучало множество авторов как в Украине так и за ее пределами. Среди них можно выделить: [5-12].
Основная часть
Скалярное управление. В некоторых случаях диапазон регулирования можно расширить за счет повышения частоты питания. Если при этом сохранять соотношение U1/f1, то мощность двигателя будет возрастать и, соответственно, будет возрастать нагрузка на преобразователь. Поэтому при управлении в диапазоне частот выше номинальной напряжение статора поддерживают постоянным U1=const.
В режиме холостого хода поток изменяется обратно пропорционально частоте (рис.1 а), а под нагрузкой он снижается тем медленней, чем больше абсолютное скольжение.
Изменения потока при увеличении частоты вызваны уменьшением тока статора вследствие возрастания индуктивного сопротивления рассеяния хσ1 , которое в этом режиме играет такую же роль, как активное сопротивление r1 при управлении по закону U1/f1=const.
При увеличении частоты располагаемый электромагнитный момент двигателя уменьшается обратно пропорционально квадрату α (рис.1 б), а располагаемая мощность – обратно пропорционально первой степени α, т.к. одновременно возрастает скорость вращения поля.
Сочетание двух режимов частотного управления U1/f1=const и U1=const дает возможность получить двухзонное регулирование скорости АД. Особенность заключается лишь в том, что регулирование скорости при частотном управлении осуществляется изменением частоты в обеих зонах, а режим управления потоком определяется законом управления напряжением.
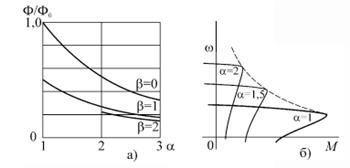 |
Рисунок 1 – Изменение магнитного потока при разных нагрузках (а) и механических характеристиках (б) в области частот выше номинальной |
Векторное управление. Если требуется двухзонное регулирование скорости, то в системе предусматривается функциональный преобразователь (ФП). Входной сигнал на нем определяется значением скорости. До тех пор пока скорость не превышает номинальное значение, сигнал на выходе ФП задает номинальный поток и остается постоянным. Когда скорость превысит номинальное значение, сигнал на выходе ФП будет уменьшаться и скорость, большая номинальной, будет достигнута при ослаблении потокосцепления ротора и значении напряжения на статоре, близком к постоянному.
Развитие векторных систем пошло по пути перехода от непосредственного измерения потока к определению его значения с помощью математической модели электромагнитных процессов в асинхронном двигателе (модели потока). Расхождения между изменившимися реальными параметрами двигателя и неизменными параметрами модели приводят к отклонению процессов в приводе от расчетных, не позволяя в полной мере использовать достоинства векторного управления. Поэтому необходима подстройка модели к нестабильным параметрам двигателя. Это одна из важных задач, возникающих при разработке системы.
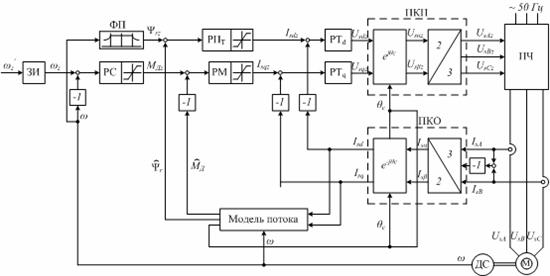 |
Рисунок 2 – Система векторного управления |
Вентельный двигатель. При двухзонном регулировании, в диапазоне от нуля до номинальной скорости поддерживается равенство нулю составляющей тока статора по оси d и одновременно изменяются частота и напряжение преобразоваеля частоты, а в верхней части диапазона, когда напряжение достигло номинального значения и дальнейшее его увеличение недопустимо, увеличивается только частота, а ток по оси d равным нулю не поддерживается.
Поскольку потокосцепление от потока ротора с постоянными магнитами не может быть изменено, поддержание напряжения постоянным при увеличении скорости до значения, большего номинального, возможно только путем создания составляющей тока Isd, отличной от нуля. Вектор тока при этом сдвигается в сторону опережения, и угол δ>90°. Для конкретного режима значение Isd может быть найдено в результате решения нелинейного уравнения:
 |
Ток Isq определяется моментом нагрузки, а ЭДС E – скоростью ω>ωн. При этом надо иметь в виду, что в установившемся режиме должно выполняться условие Is≤Isн. Это накладывает ограничение на значение длительно допустимого момента.
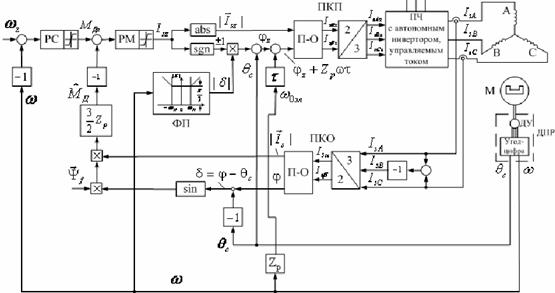 |
Рисунок 3 – Система с вентильным двигателем |
Двигатель постоянного тока. Двухзонное регулирование скорости ДПТ заключается в том, что регулирование скорости от нулевого до номинального значения ωн (первая зона) осуществляется путем изменения напряжения якоря Uя (от нулевого до номинального значения) при постоянном магнитном потоке двигателя равном номинальному Φ=Φн. Регулирование скорости от значения ωн до ее максимального значения ωмах (вторая зона регулирования) происходит за счет ослабления магнитного потока двигателя при номинальном напряжении якоря Uя=Uян. Изменение потока менее энергоемкое, чем изменение Uя, так как мощность цепи возбуждения, по сравнению с цепью якоря, не велика.
Рассмотрим подробно систему двухзонного регулирования ДПТ, так как она будет реализована в условиях лаборатории на базе привода постоянного тока Mentor II, контролера поля FXM5 и инкрементального датчика скорости.
В зависимости от требований к характеристикам электропривода применяют следующие варианты структурных схем систем двухзонного регулирования скорости:
1) когда управление каналами якорной цепи и цепи возбуждения осуществляется независимо друг от друга (раздельное управление);
 |
Рисунок 4 - Раздельное управление, функциональная схема (анимация,5 кадров, 5 повторов, 26,1 КВ) |
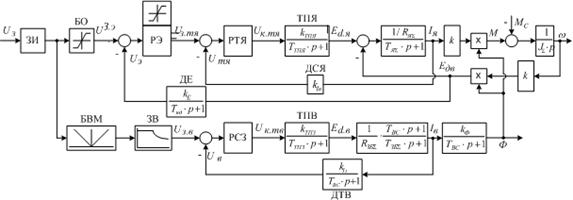 |
Рисунок 5 - Раздельное управление, структурная схема |
2) когда работа канала возбуждения осуществляется в зависимости от какой-либо изменяющейся величины, обычно это ЭДС или напряжение двигателя (зависимое управление);
3) cравнивая структурную схему этой системы с двумя описанными выше, можно сказать, что предложенная система представляет собой что-то среднее между ними. А именно: подсистема регулирования до основной скорости такая же, как и у системы зависимого управления, а подсистема регулирования возбуждения как у системы раздельного управления. Но в этом варианте, вследствие того, что основной канал замкнут по скорости, отпадает необходимость в разделительном усилителе.
Рассмотрим более подробно раздельное управление, так как эту тему будет исследовано в ближайшее время (рис.4 и рис.5).
Системы двухзонного регулирования с раздельным управлением потока возбуждения двигателя, – это системы косвенного регулирования скорости. То есть, вместо контура регулирования скорости, как в системе с зависимым управлением, используется либо контур регулирования ЭДС (КРЭ) с регулятором ЭДС (РЭ) либо контур регулирования напряжения (КРН) с регулятором напряжения (РН).
Переход к обратной связи по ЭДС или напряжению в основном контуре исключает использование принципа зависимого управления полем двигателя в обычном варианте, так как в зоне выше основной скорости сигнал обратной связи никогда не сможет достичь сигнала задания вырабатываемого ЗИ. Поэтому и возникает необходимость в разделении режимов управления напряжением преобразователя и полем двигателя.
Переход к раздельному управлению полем двигателя усложняет вопросы резервирования и эксплуатации схем, так как изменения касаются не только основного канала, но и канала управления полем двигателя. Таким образом, возникает задача создания дополнительного узла управления позволяющего и при переходе к регулированию напряжения в основном контуре сохранить принцип зависимого управления полем двигателя.
Один из вариантов реализации таких систем представлен на рис.4. и рис.5.
В этой структурной схеме БО (блок ограничения) или РУ – разделительный усилитель, предназначенный для разделения зон регулирования. Его выходное напряжение ограничено на уровне соответствующем номинальной ЭДС (напряжению) двигателя. Назначение РУ заключается в ограничении сигнала задания поступающего с ЗИ, так как ЭДС и напряжение, в отличие от скорости, остаются постоянными при изменении потока.
Переход системы управления во вторую зону осуществляется при помощи задатчика возбуждения – ЗВ при соответствующем сигнале ЗИ. При выходном сигнале ЗИ соответствующем сигналу задания скорости больше номинального ЗВ снижает сигнал задания на возбуждение.
При ω>0 работает только КРЭ при Φ=const, а при ω≤1 работает КРВ при Eд=const.
Для этой схемы основным является вопрос определить аналитическое выражение характеристики ЗВ, то есть определить как должно изменяться выходное напряжение ЗВ в зависимости от сигнала ЗИ.
Вид характеристики ЗВ зависит от того, какой из параметров при разгоне мы хотим поддерживать постоянным Mj или Ij.
Выведем характеристики ЗВ для двух вариантов. При этом не имеет значения, каким будет основной контур КРЭ или КРН. Будем считать, что основной контур замкнут по ЭДС.
a) ЗВ при Mj=const;
При работе в первой зоне исходный сигнал ЗВ должен быть постоянным и отвечать номинальному потоку возбуждения. Все это можно записать в виде уравнения:
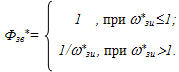 |
б) ЗВ при Ij=const;
Исходная характеристика ЗВ в первой зоне известна, – она постоянна и отвечает номинальному потоку возбуждения. Все выводы, приведенные выше, записаны для ω>ω0, то есть для второй зоны. В общем виде (для обеих зон регуляции) уравнения исходной характеристики ЗВ при Ij=const можно записать таким образом:
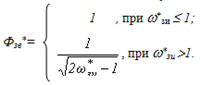 |
Наблюдатель состояния. В системах регулирования скорости промышленных механизмов в качестве датчиков скорости применяются либо тахогенераторы, либо импульсные датчики скорости, имеющие недостатки. Использование систем косвенного регулирования скорости с датчиками ЭДС или напряжения во внешнем контуре приводит к ухудшению динамических свойств привода. Особенно большие проблемы возникают в системах двухзонного регулирования, где при отсутствии датчика скорости приходится применять системы раздельного управления преобразовательными агрегатами в якорной цепи и в цепи возбуждения двигателя.
Будет рассмотрена возможность применения в системах двухзонного регулирования в качестве датчика скорости наблюдателя состояния (НС). В качестве входных сигналов для НС используем сигналы, пропорциональные напряжению якоря и потоку возбуждения двигателя.
При моделировании необходимо получить следующие графики (рис.6).
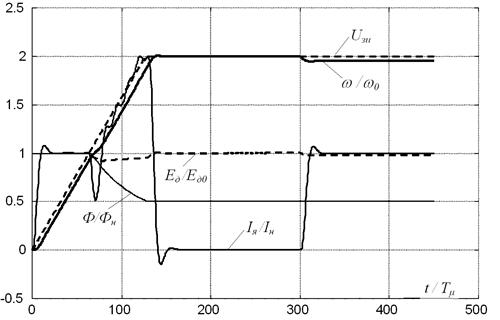 |
Рисунок 6 – Графики при роздельном управлении |
К моменту написания данного автореферата магистерская работа еще не была закончена. Окончательное завершение работы: январь 2010 г. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты.
1. Толочко О.І. Системи непрямого регулювання швидкості зі спостерігачами стану /Толочко О.І., Песковатська О.В., Кудокоцев С.М.; Наукові праці ДонНТУ. Серiя “Електротехніка i енергетика”. – Донецьк: ДонНТУ. – 2003. – №67. – С. 168-173.
2. Толочко О.И. Сравнительный анализ систем двухзонного регулирования скорости /О.И. Толочко, П.А. Максаев; Проблемы создания новых машин и технологий. Научные труды КГПИ. – Кременчуг. – 1999. – №2 – С. 32-35.
3. Толочко О.И. Системы двухзонного регулирования скорости с наблюдателями состояния /Толочко О.И., Максаев П.А., Мариничев В.Ю.; Проблемы создания новых машин и технологий. Научные труды КГПИ. – Кременчуг: КГПИ. – 2000. – №1(8). – С. 53-56.
4. Толочко О.И. Системы двухзонного регулирования скорости /О.И. Толочко, П.А. Максаев/ Проблемы создания новых машин и технологий. Научные труды КГПИ. – Кременчуг: КГПИ. – 1998. – С. 28-31.
5. Виноградов А.Б. Векторное управление электроприводами переменного тока / ГОУВПО «Ивановский государственный энергетический университет имени В.И. Ленина». Иваново, 2008. 298с.
6. Усольцев А.А. Частотное управление асинхронными двигателями/Учебное пособие. СПб: СПбГУ ИТМО, 2006, – 94с.
7. Перельмутер В.М. Системы управления тиристорными электроприводами постоянного тока/В.М. Перельмутер, В.А Сидоренко - М.: Энергоиздат, 1988.
8. Чиликин М.Г. Общий курс электропривода/М.Г. Чиликин, А.С. Сандлер - М.: Энергоиз-дат, 1981 г.
9. Казачковський М.М. Комплектні електроприводи: Навч.посібник / Дніпропетровськ: Національний гірничий університет, 2003. - 226с.
10. Зимин Е.М. Электропривод постоянного тока с вентильными преобразователями - М: Энергоиздат, 1981, – 192с.
11. Walter N. Alerich Electricity 4: Ac/Dc Motors, Controls, and Maintenance. еdition:7, Cengage Learning, 2001, pp: 360
12. Dale R. Patrick Rotating electrical machines and power systems. edition:2, The Fairmont Press, Inc., 1997 pp: 399
13. Чалый В.В. Синтез Систем управления электромеханическими обьектами с применением интеллектуальных модулей на основе оборудования фирмы Control Technique [Электронный ресурс] / Портал магистров ДонНТУ – http://masters.donntu.ru/2008/eltf/chalyy/index.htm
14. Модель двигателя постоянного тока (регулирование скорости во второй зоне) [Электронный ресурс] / Официальный сайт компании MathWorks http://www.mathworks.com/matlabcentral/fileexchange/12137-pid-and-state-feedback-control-of-dc-motors