Реферат по темі магістерської роботи: "Електропривод і автоматизація промислових установок"
ВСТУП
• Актуальність
• Мета й завдання
• Наукова новизна й практична цінність
• Практична й методологічна значимість результатів роботи
• Апробація роботи.
ОГЛЯД ДОСЛІДЖЕНЬ ПО ТЕМІ
• Огляд досліджень по темі в ДонНТУ
• Огляд досліджень по темі в Україні
• Огляд досліджень по темі у світі
ОСНОВНА ЧАСТИНА
Вступ
Кінематичні схеми шахтних піднімальних установок. Розрахункові схеми.
Аналіз діаграм прискорень, ривка, и зусиль у ШПУ
ЗАКЛЮЧНА ЧАСТИНА
СПИСОК ЛІТЕРАТУРИ
ВСТУП:
На шахтах і рудниках підйом є одним з основних ланок технологічного комплексу, від якого в значній мірі залежить працездатність і продуктивність усього підприємства. Ця роль підйому й визначає ті високі вимоги, які пред'являються як до установки в цілому, так і до її окремих елементів, у тому числі й до систем керування.
Введення надійної й сучасної системи керування електроприводом шахтної піднімальної установки дозволяє поліпшити експлуатаційні характеристики і якість роботи піднімальної установки в цілому. Відповідно до цього розробка й впровадження даних систем є основним завданням.
Метою створення сучасної системи автоматизованого керування є модернізація керування процесами пуску й гальмування клітьової піднімальної машини, а також контролю параметрів і діагностики стану встаткування піднімальної установки за допомогою сучасних мікропроцесорних засобів і засобів обчислювальної техніки.[8]
Актуальність роботи:
У зв'язку з відпрацьовуванням найбільш доступних родовищ корисних копалин шахти й рудники змушені переходити на усе більше глибокі обрії. При цьому для збереження продуктивності піднімальні установки повинні мати все більшу швидкість руху піднімальних посудин і більшу їхню вантажопідйомність.
Дана робота виконується у взаємодії з науковою тематикою кафедри, з урахуванням досвіду роботи науково-продуктивної фірми "Мідіел" і науковими тенденціями в плані застосування сучасних систем ЕП закордонними фірмами. Особливо широкий спектр продукції пропонується такими фірмами, як Elvovert (Австрія), SІEMENS (Німеччина), Schneіder électrіque (Франція), ABB (Швеція, Фінляндія), Danfoss (Данія).
Мета й завдання:
Об'єктом вивченняє шахтна вугільна піднімальна установка.
Предмет розробки - системи: тиристорний перетворювач - двигун, перетворювач частоти - асинхронний двигун (ПЧ-АД) і ПЧ-СД, також оптимальні тахограми.
Основні цілі цього проекту:
• ознайомлення з технологічним процесом роботи піднімальної установки;
• дослідження можливих варіантів удосконалювання систем електроприводів ШПУ;
• моделювання типових режимів роботи ШПУ.
Завдання досліджень.
Зазначена мета реалізується рішенням наступних завдань:
1. Розгляд технологічного процесу піднімальних установок у цілому;
2. Порівняльний аналіз можливих систем керування шахтними піднімальними установками:
• постійного струму по системі тиристорний перетворювач - двигун;
• змінного струму по системі перетворювач частоти - асинхронний двигун;
• змінного струму по системі перетворювач частоти - синхронний двигун.
3. Вибір найбільш раціональної системи ЭП ШПУ;
4. Розробка математичної моделі шахтної піднімальної установки (ШПУ), для формування оптимальних тахограм руху посудини;
5. Реалізація оптимізованої системи на постійному й змінному струмі;
6. Оцінка систем за динамічними показниками в перехідних режимах.
Наукова новизна результатів досліджень складається в:
1. розробці такого закону керування, що дозволив би підтримувати сталість перевантажувальної здатності в розглянутому діапазоні зміни частоти обертання, з формуванням законів керування;
2. розробці раціональної математичної моделі шахтної піднімальної установки (ШПУ) для вивчення динамічних навантажень.
Практична й методологічна значимість результатів роботи складається в розробці:
- нової конструкції тягового органа, що дозволяє знизити його матеріалоємність і динамічні навантаження при русі піднімальної посудини в стовбурі;
- методики вибору найбільш раціональної системи ЕП ШПУ;
- математичної моделі шахтної піднімальної установки (ШПУ) для вивчення динамічних навантажень;
Апробація роботи:
Основні положення й результати роботи представлялися, доповідалися й обговорювалися на таких конференціях, як:
- Х Міжнародної науково-технічної конференції. "Автоматизація технологічних об'єктів і процесів. Пошук молодих" (Донецьк 2010);
- Всеукраїнської студентської науково-технічної конференції. "Електротехнічні й електромеханічні системи" (Севастополь 2010, 20-22 квітня).
ОГЛЯД ДОСЛІДЖЕНЬ ПО ТЕМІ:
Локальна ситуація:
Дослідженням й оптимізацією систем ШПУ займалися такі викладачі ДОННТУ:
• д.т.н., проф. Борисенко В.Ф. [1]
Факультет: Електротехнічний (ЭТФ)
Кафедра: Електромеханічні системи автоматизації й електропривод
• д.т.н., проф. Чепак А.А.
Факультет: Електротехнічний (ЭТФ)
Кафедра: Електромеханічні системи автоматизації й електропривод
Національна ситуація:
Українськими вченими в області електропривода ШПУ вирішуються наступні питання:
- Моделювання електропривода з урахуванням типу електричних машин, за допомогою пакетів Matlab (Sіmulіnk), а також типу силового перетворювача. Описано особливості моделювання асинхронних машин і розрахунок регуляторів у системі підлеглого векторного регулювання.... [2]
- Викладені основні відомості по електрифікації й раціональному використанні електроенергії на підприємствах, що розробляють розсипні родовища. Показано особливості електропривода гірських машин і механізмів використовуваного електроустаткування. [3]
- Розгляд складних електромеханічних систем кранових механізмів підйому й горизонтального пересування, також дається їхній математичний опис, результати моделювання, приводяться структурні схеми електромеханічної і механічної частин ЕМС. [4]
- Розгляд особливостей побудови асинхронних електроприводів гірських машин на основі застосування маловентильних тиристорних комутаторів. Наведено результати досліджень процесів.[5]
- Приведення довідкових матеріалів, необхідних для проектування шахтних піднімальних установок вертикального підйому. Розгляд прикладів на вибір і розрахунок одно канатних і багатоканатних піднімальних установок. Велика увага приділена багатоканатному підйому, як найбільш ефективному виду вертикального транспорту. Дано теорію розрахунку канатів для багатоканатного підйому й визначена його оптимальна швидкість.[6]
- Розгляд типів підйомно-транспортних установок, використовуваних на підприємствах АПК. Приведення необхідних розрахунків механізмів підйомно-транспортних машин й установок.[7]
Світова ситуація:
За межами України вирішуються наступні питання:
- Розгляд пристроїв й експлуатація сучасних піднімальних машин, електропривода й устаткування піднімальних установок, виготовлених вітчизняними заводами. Розгляд конструкції встаткування піднімальних установок: шахтних клітей, скіпів, посадкових пристроїв, завантажувальних і розвантажувальних пристроїв, піднімальних канатів і копрів, а також пристрій і конструкції механічної й електричної частин піднімальних машин, контрольно-вимірювальної й захисної апаратури піднімальних установок. [8]
- Розгляд конструкції сучасних підйомно-транспортних машин, принципи їхньої дії, області застосування. Приведення основ вибору, розрахунку й конструювання механізмів. Приділено увагу питанням комплексної механізації й автоматизації виробничих процесів, підвищенню надійності й продуктивності машин, а також питанням економіки. [9]
Поява цифрових систем керування підвищило надійність електромеханічної системи в цілому, а також дозволило реалізовувати складні алгоритми керування електроприводом, при його настроюванні й усталеній роботі.
Класичною структурою ЭП ШПУ змінного струму останнім часом стала структура на базі перетворювача частоти (ПЧ-СД, ПЧ-АД), розгляду якої й віддається перевага в даній роботі.
На світовому ринку перетворювальної техніки виділилися наступні фірми-лідери: SІMENS, Shneіder Electrіque, Control Technіque, ABB, Lenze які випускають ЕП змінного струму. Кожне нове покоління перетворювачів частоти містить все більше число функцій, як керуючих двигуном, так і поліпшуючий технологічний процес. В основному це функції:
- забезпечення необхідних тахограм розгону й гальмування;
- регулювання швидкості в сталому режимі;
- прецизійні завдання швидкості й прискорення;
- забезпечення реверса;
- авто настроювання перетворювача;
- обробка сигналів зворотних зв'язків, занесених у систему керування;
- організація контурів керування;
- захисту перетворювача від струмового перевантаження;
- реалізація алгоритмів енергозбереження;
- реалізація різних принципів керування (частотно-струмове, векторне, пряме керування моментом);
- візуалізації сигналів;
- інтеграції перетворювача в систему керування більше високого рівня (промислову мережу);
- спеціальні технологічні функції;
За рахунок застосування зазначених функцій, убудованих у сучасні системи ЕП, перетворювачі фірми Shneіder Electrіque знайшли застосування в наступних електроприводах:
- насосні агрегати сучасних систем опалення (Altіvar 21);
- системи вентиляції будинків і споруджень (Altіvar 21);
- підйомно-транспортне встаткування (Altіvar 71);
- ліфти (Altіvar 71);
- фасовочно-пакувальне встаткування (Altіvar 71);
- текстильні машини (Altіvar 71);
Перетворювачі фірми Control Technіque:
- металургійна промисловість (Unіdrіve SP);
- кранові механізми (Unіdrіve SP);
- ліфти (Unіdrіve SP);
- насоси й вентилятори (Commander SK);
- конвеєри (Commander SK);
- мішалки (Commander SK);
Таким чином, сучасна перетворювальна приводна техніка, робить величезні кроки у своєму розвитку, постійно вдосконалюючись і тим самим підвищуючи якість технологічних процесів. Особливо важливим при цьому стає вироблення нових підходів до її розробки й проектування, із залученням наймогутніших обчислювальних засобів. Для постійного вдосконалювання, необхідні наукові дослідження й обґрунтовані прийняття рішень, що усувають виникаючі проблеми.
ОСНОВНА ЧАСТИНА:
Вступ:
Автоматизований електропривод шахтних піднімальних машин (ШПМ) - одне з бурхливо, розвитих напрямків, приводу сучасних виробничих машин, механізмів й установок.
Специфіка роботи, умови, у яких здійснюються транспортні операції по переміщенню вантажів, людей, механізмів, запасного й ремонтного встаткування, наявність великого числа ШПМ, що працюють у різних кліматичних зонах і здійснюючому підйомі (опускання) як із глибини кількох сотень метрів, так і із глибин біля двох кілометрів сприяли виділенню електропривода ШПМ в окремий напрямок, що дотепер пройшло кілька етапів розвитку.
До першого етапу можна, умовно, віднести широке застосування асинхронного двигуна з фазним ротором і систем з електромашинними перетворювачами.
Перехід до систем керований перетворювач (статичний) - двигун (на постійному або змінному струмі) знаменує другий етап. Можна констатувати, що цей етап триває й у цей час, але на новій елементній базі й з використанням сучасної теорії керування.
1. Кінематичні схеми шахтних піднімальних установок. Розрахункові схеми. [1]
У цей час на шахтах і рудниках експлуатується велика кількість піднімальних установок, кінематичні схеми яких можуть бути представлені в наступному виді (рис.1)
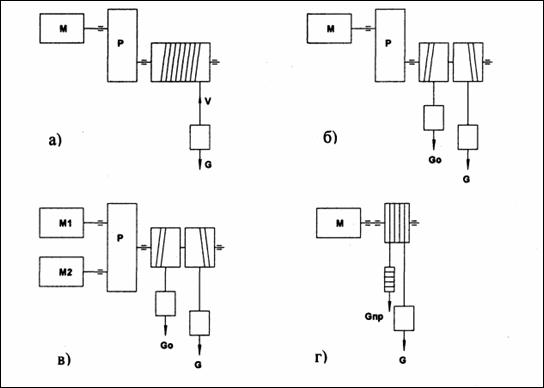
Рисунок 1 - Кінематичні схеми піднімальних установок
(на схемах не показана можлива система з канатом, що врівноважує): а) однорухомий одноклетевий; б) однорухомий двухскиповий; в) двухдвигунний двухскиповий; г) однорухомий зі шківом тертя й противагою.
Для переходу до розрахункової схеми необхідно зробити ряд припущень:
- моменти інерції окремих частин машини вважаються зосередженими в певних умовних крапках;
- пружні ланки невагомі й характеризуються постійною твердістю;
- деформація пружних ланок підкоряється закону Гука;
- хвильовими процесами в пружних елементах зневажаємо.
При дослідженні поводження електромеханічної системи (ЕМС) моменти інерції окремих ланок приводяться, звичайно, до частоти обертання приводного двигуна (або іншого заданої ланки).
Для випадку обертового руху формули приведення:
 ,
,
у випадку поступального руху:
 ,
,
при двох видах руху:
 .
.
Момент опору до частоти обертання приводиться за допомогою вираження:
 .
.
Жорсткість при крутінні:
 (Нм/рад),
(Нм/рад),
жорсткість при розтяганні (стиску):
 (H/м ),
(H/м ),
наведена жорсткість::
 ,
,
 .
.
Еквівалентна жорсткість при послідовному з'єднанні елементів:
 ,
,
при паралельному з'єднанні:
 .
.
Після приведення моментів інерції й жорсткостей елементів кінематичні схеми мал.2 будуть мати вигляд:
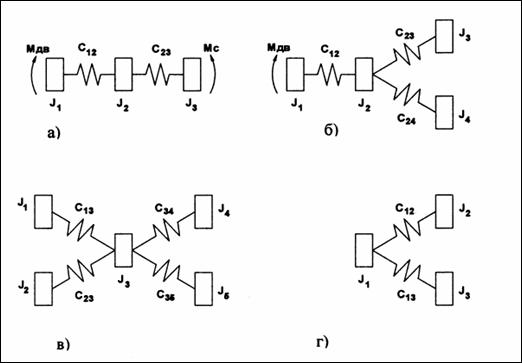
Рисунок 2 - Розрахункові схеми типових ШПМ
На рис. 3 наведена типова нерозгалужена трьох масова розрахункова схема. З обліком всіх діючих сил у системі рис. 2 трансформується:
Рисунок 3 - Розрахункова трьох масова схема, [1].
2. Аналіз діаграм прискорень, ривка, і зусілль у ШПУ
Робота піднімальної установки характеризується циклічністю, тобто рядом змінюючихся циклів, що випливають один за одним. У свою чергу кожен цикл можна розбити на чотири основних періоди: розгін, рівномірний рух, уповільнення до повної зупинки й пауза.
Таким чином, щоб забезпечити необхідну продуктивність будь-якого підйому, кожен цикл повинен укладатися в певний, наперед заданий час. Для цього необхідно витримувати розрахункові значення прискорення й уповільнення, максимальній швидкості й тривалості паузи, тобто витримувати прийняту діаграму швидкості. Діаграма швидкості підйому - це залежність швидкості руху піднімальних посудин від часу.
Піднімальні установки залежно від призначення й висоти підйому, виду й вантажопідйомності сосуди, числа обріїв, що обслуговують, відстані між ними можуть працювати по одній з наступних діаграм руху (мал.4): а) трьохперіодна, б) п’ятиперіодна, в) шестиперіодна, г) семиперіодна
Рисунок 4 - Типові тахограми ШПМ
Діаграма типу рис. 4 (а) є найбільш проста і знаходить застосування для клітьових піднімальних установок з одноповерховими не перекидними клітями при хитних прийомних площадках. В окремому випадку t1 може бути рівним t3 (часи розгону й гальмування), звичайний час t3 уповільнення (гальмування) трохи менше t1 .
Найбільш складні шести- і семиперіодні діаграми швидкості необхідні при вантажному підйомі з перекидними скіпами або клітями. Це порозумівається необхідністю обмеження швидкості руху піднімальних посудин розвантажувальних кривих. Тому період розбивається на дві ділянки з різними прискореннями. Те ж ставиться й до періоду вповільнення.
Рисунок 5 - Діаграми зусиль урівноваженої двухкінцевої (а), неврівноваженої з перекидними скіпами (б) і одно клітьової (в) піднімальної установки.
На рис. 5 а, б наведені діаграми рушійних зусиль на обіді барабана (шківа тертя) урівноваженої двухконцевой піднімальною установкою з неперекидними скіпами при нормальній роботі з видачі вантажу й для статично неврівноваженої піднімальної установки, обладнаної перекидними клітями або скіпами. З діаграм зусиль треба, що установки з неперекидними клітями або скіпами мають у період пуску менше зусилля на валу двигуна в порівнянні з перекидними. Це порозумівається тим, що при перекиданні піднімальної посудини частина його ваги доводиться на розвантажувальні криві й цим створюється ще більша неврівноваженість системи, що наростає наприкінці дотягивания при розвантаженні посудини. Тому в момент перекидання необхідне створення значного гальмового моменту на валу піднімальної машини. Там же представлені діаграми швидкості руху піднімальних посудин U = f (t).
Діаграма зусиль клітьової піднімальної установки (рис. 2, в) істотно відрізняється від діаграм зусиль скіпового підйому. Порозумівається це складністю маневрів при посадці клітей на посадкових куркулів або хитні площадки.
Максимальна швидкість руху посудин чисто вантажних піднімальних установок вертикальних шахт і рудників не повинна перевищувати значення:

Де Vмакс - максимальна швидкість руху піднімальний посудин, м/с, Н- висота підйому, м.
Причому ця швидкість не повинна перевищувати 20м/с. Максимальна частота обертання двигуна повинна залишатися незмінної при зміні навантаження на валу барабана піднімальної машини, тобто механічна характеристика двигуна повинна бути твердої.
Підвищення граничних швидкостей вимагає й збільшення прискорень. Однак підвищення прискорення створює додаткові динамічні зусилля на механічну частину піднімальної машини й канати, негативний вплив на людей, небезпеку прослизання каната по шківі в піднімальних установок зі шківами тертя.
Найбільш ефективний спосіб зниження динамічний зусиль у пружних елементах піднімальної машини й канатах, зниження фізіологічного впливу на людей - плавна зміна моменту, що рухається, тобто обмеження похідної прискорення - ривка. [9]
На прикладі, розглянемо промодельовану систему у відносних одиницях, тиристорний перетворювач - двигун (ТП-Д) з обмеженням ривка (мал.7). При моделюванні системи були досліджені пуск, реверс, гальмування, наброс і скидання навантаження.
Для обмеження прискорення і ривка при керуванні швидкості піднімальної машини можна замість звичайного задавача інтенсивності, який часто називають інтегральним (І-ЗІ) застосувати вдосконалений задавач інтенсивності з обмеженням ривка (І2-ЗІ), структурна схема якого наведена на рисунку 4.2, а вихідна характеристика має вигляд, показаний на рисунку 4.3.
Цей ЗІ складається з пропорційного підсилювача ПП, ланки обмеження ЛО, ланки з ідеальною релейною характеристикою РЛ та двох інтеграторів І1, І2. За допомогою негативних зворотних зв’язків утворюються два контури, внутрішній з яких є звичайний ЗІ. Для більш точного відпрацювання системою керуючої дії І2-ЗІ може доповнюватися паралельними корегуючими зв’язками за першою та другою похідними від вихідного сигналу, що показані на рис.4.2 пунктирами. Коефіцієнти передачі цих зв’язків обираються здебільш з умов “модульного оптимуму”.
Рисунок 6 – ЗІ з обмеженням ривка
Рисунок 7 – Вихідна характеристика І2-ЗІ
Наведений І2-ЗІ формує сигнали завдання на швидкість Uзи=kш*W (W – швидкість обертання двигуна, kш – коефіцієнт зворотного зв’язку за швидкістю), прискорення Uзп та ривок Uзр.
На рис. 7 позначено tзр – час зростання прискорення; tсп – час спадання прискорення; tу – час зміни швидкості з усталеним прискоренням.
Визначимо сталу часу задавача струму:
Tзс=tс, де tс – час обмеження ривка.
Стала часу ЗІ:
 , где Е0 – прискорення;
, где Е0 – прискорення; 
Задавач інтенсивності розміщається в осередку ЗІ-2АІ.
Структурна схема системи регулювання швидкості шахтної піднімальной установки у відносних одиницях наведена на рисунку 8, а схема І2-ЗІ на рисунку 9.
Рисунок 8 – Структурна схема для дослідження динамічних режимів ШПУ

Рисунок 9 – Схема підсистеми І2-ЗІ
Порівняємо поведінку системи при пуску від різних задавачів інтенсивності.
Графіки перехідних процесів при пуску без навантаження приведені на рис. 10 – 12, а з навантаженням на рис. 13 – 16. На цих графіках цифрами позначено робота системи віз звичайного ЗІ (1) та ЗІ з обмеженням ривку (2).
Як видно з графіків при використанні І2-ЗІ перерегулювання за струмом зменшилося до 1,13 %, максимальне значення прискорення до 0,0059, а ривка до 0,001.
Графіки перехідних процесів в системі керування електроприводом ШПУ при роботі від І2-ЗІ з навантаженням приведені на рис. 4.12. Отримані графіки свідчать, що обрана система керування електроприводом ШПУ задовольняє усім вимогам технологічного процесу і може бути рекомендована до впровадження.
Рисунок 10 – Графіки перехідних процесів при пуску без навантаження
Рисунок 11 – Графіки прискорення при пуску без навантаження
Рисунок 12 – Графіки ривка при пуску без навантаження
Рисунок 13 – Графіки перехідних процесів при пуску з навантаженням
Рисунок 14 – Графіки прискорення при пуску з навантаженням
Рисунок 15 – Графіки ривка при пуску з навантаженням
Рисунок 16 – Графіки перехідних процесів при роботі за тахограмою
ВИСНОВОК:
На данном этапе работы, были проведены исследования динамики ЭМС ШПУ с приводом, по системе ТП-Д были выполнены в среде MatLab (приложении Simulink) и показали возможность реализации желаемой тахограммы движения системы на этапах разгона, замедления и торможения системы.
При написании данного автореферата магистерская работа ещё не завершена. Запланированная дата окончания работы: вторая декада декабря 2010 года. Полный текст работы может быть получен у автора (Лазаревой М.В.) или руководителя (Борисенко В.Ф.) после указанной даты.
Список використаної літератури:
1. Борисенко В.Ф. Электромеханические системы автоматизации стационарных установок. Сборник трудов ХII международной научно-технической конференции, - Донецк 2005., 283с.;
2. Алексеев В.В., Козярук А.Е., Загривный Э.А. Электрические машины. Моделирование электрических машин приводов горного оборудования;
3. Багаутинов Г.А. и др. Основы электропривода. Электрооборудование горных машин и механизмов карьеров и приисков;
4. Герасимяк Р.П. Анализ и синтез крановых электромеханических систем, - Одесса, СМИСЛ, 2008. - 192 с.;
5. Бежок В.Р. Руководство по ревизии , наладке и испытанию ШПУ Н. Донецк: ДонНТУ, 2009 – 671с.
6. Лотков Н. А., Ф. Г. Зуев Подъемно-транспортные установки;
7. Завозин Л. Ф. Шахтные подъемные установки. Государственное научно-техническое издательство литературы по горному делу. Москва, 1960;
8. Александров М. П. Подъемно-транспортные машины: Учеб. для машиностроит. спец. вузов. — 6-е изд., перераб. — М.: Высш. шк., 1985.—520 с.,



 ДонНТУ
Портал
магістрів ДонНТУ
ДонНТУ
Портал
магістрів ДонНТУ
