УДК 62-5
Система управления вибропневматическим сепаратором
Логинов В.А.; Гавриленко Б.В., доц., Ph.D.
Донецкий национальный технический университет
Источник: Автоматизація технологічних об'єктів та процесів. Пошук молодих. Збірник наукових праць. X науково-технічної конференції аспірантів та студентів в м. Донецьку 18–20 травня 2010 р.– Донецьк, ДонНТУ, 2010. (с. 160-162)
Смотреть презентацию: на www.slideshare.net
В последние годы отмечается рост популярности технологии сухого пневматического обогащения углей. Это связано с тем, что при использовании данной технологии пропадает необходимость обеспечения обогатительной установки водой, можно производить обогащение угля крупностью 0..50 мм, хорошо обогащаются даже антрациты, а сама установка обладает высокой производительностью и эффективностью.
Таким образом, углеобогатительная установка на основе указанной технологии достаточно эффективна. Но эффективность может быть повышена. Это возможно путём устранения её главного недостатка – ручного управления. Главная машина установки – вибропневматический сепаратор – подвержен значительному времени простоя по причине отсутствия исполнительных механизмов для изменения технологических параметров. Также отсутствует датчик разрыхленности постели материала и система управления процессом обогащения, что приводит к значительному влиянию человеческого фактора на эффективность разделения.
Система управления может быть построена как набор блоков, каждый из которых отвечает за измерение и изменение определенных параметров вибропневматического сепаратора (далее сепаратор). Все блоки взаимодействуют с центральным устройством, которое, согласно алгоритму, управляет процессом разделения и создает запросы и информационные сообщения оператору.
На рис.1 показана схема сепараторной установки с расположенными в ней блоками. Для управления используются следующие блоки:
- БПУ – блок пылеулавливания;
- БКД – блок качаний деки;
- БПР – блок продольного наклона деки;
- БПП – блок поперечного наклона деки;
- БПВ – блок подачи воздуха;
- БПМ – блок подачи материала;
- БСП – блок состояния постели.
Задачей БПУ является обеспечение оператора информацией о состоянии системы пылеулавливания (исправность вентилятора, давление в трубопроводе и пр.). БКД измеряет и изменяет режим качаний деки сепаратора. БПР и БПП измеряют и изменяют соответственно продольный и поперечный углы наклона деки. БПВ измеряет и изменяет параметры воздушного режима восходящего потока (расход и пульсации воздуха). БПМ управляет питателем. БСП информирует о состоянии постели материала (измеряет разрыхленность).
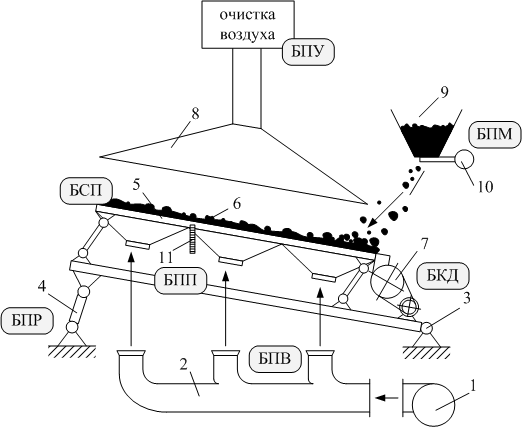
Рисунок 1 – Схема сепаратора СВП–5.5х1
[1]:
1 – технологический вентилятор; 2 – воздуховод; 3 – опора; 4 – подъемный механизм; 5 – дека;
6 – постель; 7 – приводной механизм; 8 – зонт; 9 – бункер; 10 – питатель; 11 – подъемный механизм
Центральное устройство (ЦУ) с каждым блоком взаимодействует по двухпроводной линии связи. Это позволит повысить надежность системы по сравнению с более экономичной топологией «общая шина». С компьютером ЦУ соединяется по интерфейсу RS–232 (рис.2). При этом у оператора должна быть возможность ручного управления процессом через ЦУ.

Рисунок 2 – Структурная схема системы управления
Применение ЭВМ позволит использовать сложную модель для эффективного управления процессом. Также возможен сбор и архивирование данных о работе установки и наглядное отображение текущего состояния процесса.
Центральное устройство представлено микроконтроллером МК, который питается от промышленной сети через преобразующий блок питания БП (рис.3). Для согласования уровней при обмене информацией с компьютером предназначен блок согласования БС. Каждый из блоков БПУ..БСП соединяется с МК через устройство гальванической развязки ГР. Второй блок питания предназначен для передачи по линии к блокам сигнала более высокого по уровню по сравнению с напряжением, которым оперирует МК.
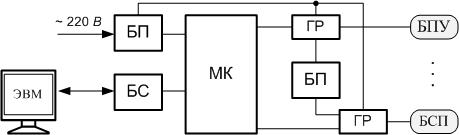
Рисунок 3 – Укрупнённая структурная схема
Каждый блок должен одинаковым образом взаимодействовать с МК. Это позволит упростить обмен информацией между МК и блоками, а также избежать связанными с этим ошибками. Формат сообщений обмена данными между ЦУ и блоками имеет следующий вид (рис.4):
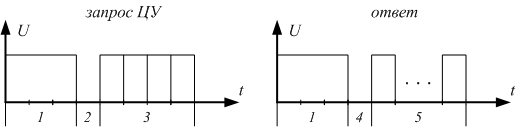
Рисунок 4 – Вид сообщений:
1 – стартовый бит; 2 – запрос на изменение/измерение; 3 – команда; 4 – бит чётности; 5 – ответные данные
Перечень ссылок
- Логинов В.А., Гавриленко Б.В. Автоматизация процесса обогащения углей на вибрационно-пневматическом сепараторе // Автоматизація технологічних об'єктів та процесів. Пошук молодих. Збірник наукових праць. IX науково–технічної конференції аспірантів та студентів в м. Донецьку 20–22 травня 2009 р.– Донецьк, ДонНТУ, 2009. – 207 с. (с. 126–128)