В библиотеку
Организация виртуального очувствления для задач робототехники
Петрин А.А.
Ордена Ленина Институт Прикладной Математики им. М.В. Келдыша
Аннотация
Исследована проблема виртуального очувствления для задач робототехники. Представлена архитектура виртуальной сенсорной системы. Виртуальная сенсорная система состоит из набора физических, логических и виртуальных сенсоров. Рассмотрены уровни иерархии для каждого типа сенсоров. На физическом уровне интеграция обеспечивает единообразный интерфейс и доступ к конкретным устройствам. На логическом уровне сенсорная интеграция представляет абстрактные данные для верхнего уровня. Виртуальная сенсорная интеграция обеспечивает область общих абстрактных данных для супервизора.
Введение
Современные сенсорные системы, как правило, работают одновременно с набором разнообразных датчиков, таких как системы технического зрения, ультразвуковые, тактильные, силомоментные и другие типы датчиков. Основное требование, которое предъявляется к этим системам, применяемым в робототехнике, является то, что обработка зрительной, слуховой, тактильной и другой информации должна осуществляться в реальном масштабе времени. Сенсорные системы позволяют роботу выполнять технологические и другие операции, используя обратную связь, аналогичную той, которая имеет место при работе человека. Обобщенная архитектура сенсорной системы показана на рис.1.
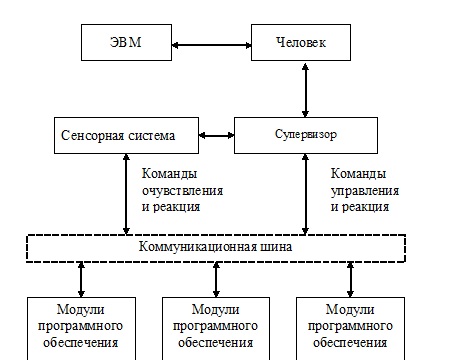
На самом верху находится человеко-машинный интерфейс, посылающий команды супервизору, который, в свою очередь, посылает команды всем исполнительным устройствам и модулям. Это модули программного обеспечения, каждый из которых согласован со специальной функцией машины (робота); они действуют отдельно, с функцией очувствления или совместно.
Для решения широкого круга практических задач используется набор разнообразных датчиков, образующих мультисенсорную систему. Виртуальная сенсорная система (ВСС) является мультисенсорной системой, которая служит эффективным средством задания, восстановления и анализа сенсорных образов, формируемых таким набором разнообразных датчиков. Эта система поддерживает модели объектов на основе списка признаков, а также структурные модели. Среди систем очувствления наибольшей информативной емкостью обладают системы технического зрения. Первоначально ВСС начали разрабатываться именно для систем технического зрения. Поэтому исследование, разработка и терминология ВСС тесно связаны с проблемой распознавания образов и терминологией систем технического зрения. Основными элементами ВСС являются логические и виртуальные сенсоры.
Полный текст статьи может быть загружен по ссылке http://www.keldysh.ru/papers/2003/source/prep2003_42.doc