| Rus Ukr Eng | РЕФЕРАТ |
Кафедра: Геоінформатики та геодезії
Специальность: Землеустій та кадстр

Абдаллах Ранг А
Тема выпускной работы:
Оновления цифрової карти з використанням космічних знімків тіехнологій.
Керівник: Професор, Доктор Технічних Наук С.Г.Могильный
Реферат з теми випускної роботи
Введення
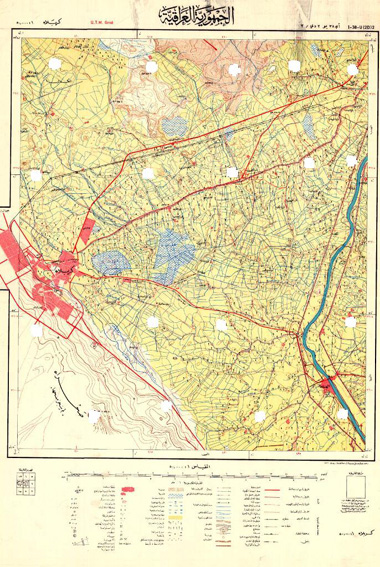
У даній науковій роботі наведені докладні пояснення щодо оновлення старих карт з використанням інтеграції системи дистанційного зондування Землі (ДЗЗ), диференціальної Глобальної Системи Позиціонування (DGPS) і Геологічної Інформаційної Системи (GIS). Особливо в країнах з великою площею, таких як Ірак, існують тисячі карт, які не оновлювалися десятки років, проте вони містять дуже важливу і потрібну інформацію, яку необхідно враховувати і використовувати. У той же час ми не можемо повністю покладатися на дані, які містяться в цих картах, оскільки вони не відображають реальну картину поверхні досліджуваної території у зв'язку зі змінами, які відбулися на ній. Таким чином, головна ідея цієї роботи полягає в тому, щоб знайти точний, практичний, швидкий і економічний спосіб оновлення карт за допомогою інформації, отриманої за допомогою дистанційного зондування. Крім того, були дотримані всі умови і проведені всі необхідні дослідження для оновлення карти досліджуваного району в місті Кербела з масштабом 1:50000, яка оновлена в останній раз в 1984 році.
Оновлення здійснювалися в три етапи:
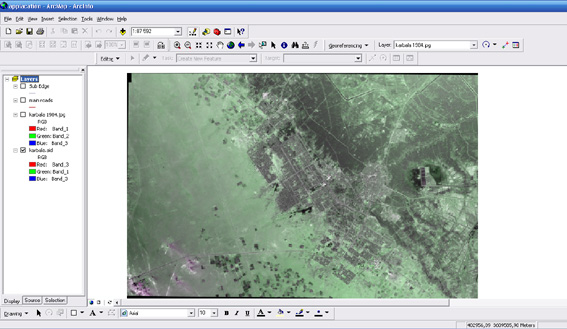
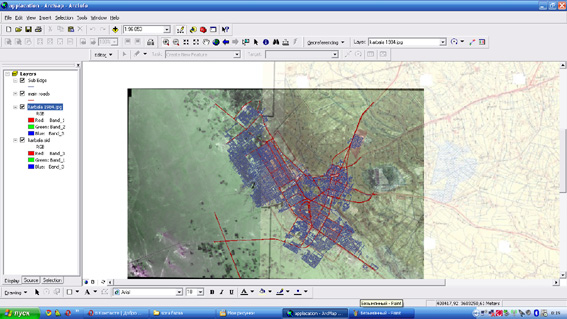
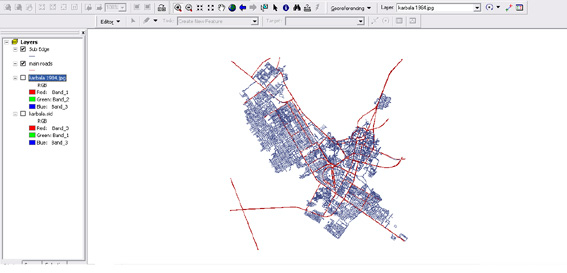
1 -- Етап: етап цифрової обробки космічних знімків і карт. Даний етап передбачає цифрову обробку космічних знімків за допомогою ArcGIS9. Після об'єднання системи координат космічного знімка й карти, процес отримання інформації від них почався з допомогою контрольованої класифікації Системи аналізу даних про ресурси Землі, де ця інформація підрозділяється на шари. Для виявлення змін, які сталися на карті, процес оновлення карт здійснюється за допомогою ArcGIS 9 шляхом порівняння кожного шару, витягнутого з космічного знімка, з його аналогом у карті; та вивчення розширення в місті Кербала і зміна, що відбулися у мережі доріг і каналів.
2 - етап польових досліджень: етап польових досліджень починається з виявлення усіх частин досліджуваної території і вибору чітких точок на супутниковому знімку, як опорних точок (GCP), що використовуються далі для геометричної корекції зображення. Спостереження проводяться за допомогою високоточної (DGPS) моделі (Trimble), яка почала спостереження за базовою точкою. Потім спостереження виробляються в опорних точках у всіх частинах досліджуваної території. Для того, щоб перетворити дані, отримані із супутникових зображень з системою координат, ми виробляємо спостереження за деякими горизонтальними опорними точками за допомогою Світової геодезичної системи координат (WGS84). Оскільки ці горизонтальні опорні точки мають значення координат у старій системі Іраку (Clarck), сім параметрів перетворення даних розраховуються за допомогою рівнянь перетворення даних. Остання спостереження на даному етапі буде проводитися за 30 точками, розташованими по всій території досліджуваного регіону. Кожна з цих точок являє собою чіткі функції, такі як, точка перетину двох і більше ліній або транспортна розв'язка, які будуть використовуватися при оцінці точності отриманих карт.
3 - виготовлення карт: ця стадія складається з двох частин: перша частина полягає у виробництві цифрових карт, які сумісні з ГІС. Друга частина включається в оцінці точності виготовлених карт.
Актуальність
Технічний прогрес не стоїть на місці, з'явилися нові технології, удосконалюються програми, які використовуються для обробки даних і складання більш точних і докладних карт для великих і віддалених територій. Актуальність безпосередньо пов'язується із самим матеріалом дослідження, його специфікою.
Наукова значимість
Наукова значимість полягає в тому, щоб оновити дані і створити точну сучасну карту для досліджуваного регіону. Недостатня вивченість цього питання вимагає отримання нових даних, структурування інформації. Отримані результати допомагають знайти точний, практичний, швидкий і економічний спосіб оновлення карт за допомогою дистанційного зондування.
Практична цінність
Практична цінність даної наукової роботи полягає в можливості використовувати отриманий досвід для складання цифрових карт для будь-яких територій.
Реферат по темі випускної роботи
Чому ми вибрали місто Кербела в якості досліджуваної території?
Причин кілька: по-перше, різноманітність рослинного покриву і землекористування, водопостачання, сільського господарства, будівель і доріг.
По-друге, місто Кербела представляє історичну і соціальну цінність, тим самим місто є свідком масштабних змін, що відбуваються у всіх сферах життя. По-третє, наявність вихідних даних, наприклад, супутникових знімків і топографічних карт. І останній аргумент: виготовлені в даній науковій роботі цифрові карти, особливо оновлені карти, можуть бути корисними для поточних проектів.
Топографічні карти дуже важливі і необхідні в сучасному житті. Багато дослідні центри виявляють підвищений інтерес до топографічним картам, оновлення яких необхідно для фахівців, проектувальників і дизайнерів у сфері цивільного будівництва для планування та створення мережі транспортних магістралей та інших доріг, розвитку і захисту природних ресурсів і навколишнього середовища, а також для туристичного сектора.
Проблема, з якою зіткнулися фахівці, полягає в тому, як оновлювати топографічні карти, які охоплюють величезні території, які досить швидко видозмінюються, так як даний процес вимагає багато часу, зусиль і грошових витрат. Ірак є однією з тих країн, де близько 95% топографічних карт з масштабом 1:25000, 1:50.000 і 1:100,000 не оновлюються, а якщо і оновлюються, то тільки карти з малим охопленням територій.
Метою модернізації карт є можливість внесення змін в карту регіону з тим, щоб допомогти проектувальникам в їх роботі. Безсумнівно, що постійне оновлення топографічних карт за допомогою традиційних методів є нездійсненним завданням у наші дні, так як вимагає величезних інформаційних ресурсів. Тому країни, що розвиваються розуміють важливість створення сучасних топографічних карт своїх територій, для чого і вони використовують передові наукові методи розвинених країн.
На зміну традиційним методам поновлення топографічних карт, які потребують значних часових і матеріальних витрат, виникла ідея застосування дистанційного зондування та DGPS (Диференціальна Глобальна Система Позиціонування). З моменту появи космічних знімків багато агентств та установи намагалися застосовувати даний метод оновлення топографічних карт, і тільки в останні роки стали використовувати мультиспектральні і мультіразрешающіе зображення, отримані з супутників. Інтеграція дистанційного зондування, DGPS (Диференціальна Глобальна Система Позиціонування) та GIS (Геологічна Інформаційна Система) допоможуть в оновленні топографічних карт з найвищою точністю при мінімальних витратах.Після успішного запуску супутника IKONOS в 1999 році, став доступний новий джерело для отримання зображення просторових координат цивільних об'єктів. У багатьох куточках світу космічні знімки високого дозволу від IKONOS виявилися корисними джерелами для створення ортотрансформірованних зображень та продуктів асоційованого відображення. Одним з головних переваг зображення супутникових даних полягає в простоті дослідження тих районів, які раніше були важко доступними і небезпечними при використанні традиційної аерофотозніманню. Однак для легкодоступних ділянок земної поверхні, при дослідженні яких застосовується традиційна високоразрешающая аерофотозйомка, даний метод не є актуальним.
Оновлення старих топографічних карт становила складність для картографів при використанні аналогових процесів. В даний час, одночасне використання гнучкості цифрової обробки і багатократності супутникового спостереження приводить до швидкого і ефективного оновлення топографічних карт
Головна мета даної наукової роботи полягає у визначенні процедури оновлення старих топографічних карт з детальними рекомендаціями для їх оцифровування. Друга мета даної роботи полягає в тому, щоб створити оновлену карту з використанням DGPS, дистанційного зондування та GIS для отримання високоточних цифрових багатофункціональних карт для досліджуваного регіону.
Процес оновлення карт є складним процесом і вимагає багато часу і зусиль у порівнянні з використанням традиційних методів. Проте з використанням методів дистанційного зондування, DGPS та ГІС, зусилля стають менш витратними в грошовому та часовому вираженні, а карти більш точними.
Зацікавленість у використанні GPS виникла більше десяти років тому. В останні роки ця зацікавленість значно зросла, в першу чергу завдяки загальному вдосконалення технології супутникового зв'язку, модернізації методики обробки даних за допомогою GPS і розгортання повного сузір'я (супутникове сузір'я - конфігурація групи супутників GPS у космічному просторі) з 24 супутників. Удосконалення технології супутникового зв'язку дозволять більш точно визначити тривимірну позицію, в той час як повне сузір'я забезпечує достатню кількість супутників для повної геометрії 24 години на добу по всьому світу. Це розвіяло початкові сумніви щодо залежності від Глобальної системи позиціонування як універсального практичного інструменту, і таким чином зробило GPS вельми перспективним для використання в картографічних додатках.
Використання GPS в якості високоточного методу позиціонування є безперечним. Висока точність стала досяжна із застосуванням GPS як у статичному, так і в кінематичному режимах. За нинішніх потужних алгоритмах обробки даних, що дозволяють в значній мірі скоротити час збору і обробки даних, практично не існує відмінності між двома методами. Спостереження за допомогою GPS дають відносне геометричне визначення точок для того, щоб приймачі могли одночасного спостерігати за одними й тими ж супутниками. Процедура визначення місця розташування точок спрощується завдяки наявності багатьох (більше чотирьох) супутників у вікні перегляду. GPS необхідні дані спостережень, принаймні, з чотирьох супутників і декількох приймачів для визначення місцезнаходження точного в статичному режимі, і, щонайменше, п'яти супутників, які необхідні в кінематичному режимі. З цим сузір'ям з 24 GPS супутників розгорнутих по всьому світу, необхідну кількість одночасно спостережуваних супутників легко досяжно. Наявність супутників ГЛОНАСС (Глобальна навігаційна супутникова система) та існуючих досліджень у поєднанні GPS і ГЛОНАСС може лише допомогти ситуації. Два типи спостережуваних зроблені в GPS позиціонуванні - псевдодальность і фаза несучої частоти. Псевдодальность - це відстань між супутником і приймачем, обчислене за часом поширення сигналу коду (C / A код (код вільного доступу) або P-код) від супутника до приймача. Фаза несучої частоти - представляє собою різницю між фазою, отриманої з супутника і фазою приймача осцилятори під час вимірювання. Час вимірювань отримано опосередковано з цих фаз вимірювання з використанням двох фаз несучого сигналу L1 (1575,42 МГц) і L2 (1227,60 МГц). Приймач повинен не тільки фіксувати необхідну кількість супутників, але й їх геометричне розташування, яке залежить від ДОП-фактора (фактор втрати точності) повинно бути прийнятно. Чим менше значення PDOP (фактор втрати точності позиціювання), тим точніше геометричне розташування супутників. На точність вимірювань GPS можуть впливати різні помилки, такі як прослизання циклу і багатопроменева інтерференція, які можуть погіршити точність визначення місця розташування. Сьогодні більшість з цих помилок вважаються керованими для більшості операцій обстеження.
Висока точність системи GPS полягає в її диференціальному позиціонування. В одній точці позиціонування для визначення геоцентричної позиції приймача, точність у метровому діапазоні. Проте, працюючи в диференційному режимі, GPS дає дуже точну інформацію про положення і швидкість, коли використовується спостереження над фазою несучої сигналу. Точність визначення місця розташування в даному випадку визначається на рівні сантиметри [29].
Координати GPS завжди безпосередньо пов'язані з геоцентричної, наземної і декартовій системами координат, і можуть бути легко перетворені в широту, довготу і висоту еліпсоїдальної [9]. Виробництво або модифікація карт здійснюється за допомогою будь-небудь проекційної системи, наприклад, такий як UTM, або локальної системою прямокутних координат. Вертикальний контроль (ортометріческая висота), який посилається на геоїд, відрізняється від GPS даних, отриманих на еліпсоїдальної висоті. Важливо, щоб особлива увага приділялася правильному конвертації еліпсоїдальної висот у ортометріческіе еквіваленти на основі знань локальних ундуляцій геоїда. Вертикальна точність, залежить від наявності та точності використовуваної моделі геоїда. Застосовуючи систему GPS для складання карт, будь-яка з цих проблем можуть звести нанівець весь процес, і тому вона вимагає суворих заходів контролю якості для проведення і забезпечення успішної місії. У міру вдосконалення існуючих приймачів і ефективних методів обробки даних, більшість факторів, які викликають ці проблеми можна контролювати, мінімізувати або уникнути. Ці проблеми та шляхи їх вирішення будуть додатково розглянуті в цій науковій роботі.
Необхідність у дуже точних вимірах початку відліку часу важливі, тому що помилки в окремих точках початку відліку будуть впливати на точність визначення контрольних точок, які згодом будуть використовуватися для географічної прив'язки та трансформації супутникових знімків.
Тепер саме час зупинитися на помилках в GPS.
До цих пір ми виробляли розрахунки даних, отриманих за допомогою системи GPS вельми абстрактно, як якщо б все це відбувалося у вакуумі. Але в реальному світі є багато факторів, які можуть негативно вплинути на якість проходження сигналу GPS. Щоб отримати максимальну точність даних GPS, хороший приймач GPS повинен враховувати широкий спектр можливих помилок. По-перше, одним з основних припущень, якими ми користуємося в цьому дослідженні не зовсім вірно. Користувач розраховує відстань до супутників шляхом вимірювання часу проходження радіосигналу від космічного апарату до приймача помноженим на швидкість світла. Але швидкість світла є постійною тільки у вакуумі. Так як сигналу GPS проходить через заряджені частинки в іоносфері, а потім через водяний пар в тропосфері швидкість проходження сигналу трохи знижується, і це спричиняє за собою таку ж помилку, як помилка годинника приймача. Є кілька способів мінімізації такого роду похибки. З одного боку ми можемо прорахувати середньостатистичне відставання проходження сигналу від супутника на приймач для середньостатистичного дні при середньостатистичних погодних умовах. Цей метод називається моделюванням, він може бути ефективним, але, звичайно, атмосферні умови рідко бувають наближені до середньостатистичним. Другий спосіб мінімізації атмосферних помилок є порівняння відносних швидкостей двох різних сигналів. Це вимір "подвійної частоти" є дуже складним і можливе лише з передовими приймачами.
Однак коли сигнал GPS потрапляє на землю, проблем не уникнути й тут. Сигнал може відбиватися від різних наземних перешкод (таких як високі будівлі або скелі) перш, ніж потрапити на наш приймач. Це явище називається багатопроменева інтерференція, подібно віддзеркалень, які ми могли побачити на екрані телевізора. Хороші приймачі використовують сучасні методи відмови сигналу для усунення цієї проблеми. Вся концепція GPS грунтується на ідеї про те, що сигнал GPS потрапляє прямо від супутника до приймача. На жаль, в реальності, сигнал також відбивається від оточуючих його об'єктів в навколишній дійсності, і ці сигнали також потрапляють на приймач. У результаті ряд сигналів надходять на приймач: перший сигнал прямій, а потім решта. Дане явище створює безладні сигнали. Якщо відображені сигнали досить сильні, вони можуть створити перешкоди, тим самим приймач буде фіксувати помилкові вимірювання. Сучасні приймачі використовують різні прийоми обробки сигналу, щоб переконатися, що вони фіксують тільки самі ранні прибувають сигнали (які є прямим).
Хоча сучасні супутники дуже складні, вони все одно допускають деякі дрібні помилки в системі. Атомний годинник, які вони використовують дуже точні, але вони не досконалі. Може виникнути секунда розбіжності, що призводить до спотворення даних. І хоча позиції супутників знаходяться під постійним контролем, але їх не можуть відслідковувати кожну секунду. Так звані ефемерідние помилки можуть виникнути в момент, коли моніторинг не здійснюється.
Ефемерідние (або орбітальні) дані постійно передаються супутниками. Приймачі зберігають у "альманасі" ці дані для всіх супутників, і вони оновлюють ці альманахи, коли надходять нові дані. Як правило, ефемерідние дані оновлюються щогодини. Диференціальна GPS можуть усунути майже всі помилки. Основні геометричні характеристики самі по собі можуть збільшити число цих помилок за так званим принципом "Геометричного фактора зниження точності" або GDOP. Це звучить складно, але принцип досить простий.
Кількість супутників зазвичай більше, ніж необхідно приймача для визначення положення, тому приймач вибирає кілька супутників, а інші ігнорує. Якщо він вибирає супутники, які розташовані близько один до одного в небі, що перехрещуються кола, які визначають положення, будуть формувати дуже мале коло ковзання. Це тягне за собою збільшення площі "сірої зони" або допустимого рівня помилки навколо позиції. Якщо він вибирає супутники, які широко розташовані один від одного, кола перехрещуються майже під прямим кутом, що мінімізує виникнення помилок. Хороші приймачі можуть визначити, у яких супутників GDOP буде низьким.
Наступний хвилюючий нас питання: що таке диференціальний GPS?
Для того, щоб отримати в режимі реального часу дані про місцезнаходження з високим ступенем точності, використовують Диференціальну GPS. Диференціальний метод позиціонування використовує дані щодо положення точки на основі супутникових сигналів, і використовують поправку до даного місця розташування. Ці поправки, відмінність між координатами, обчисленими за допомогою супутникових сигналів і вже відомим значенням, формуються базовим приймачем, чиє становище заздалегідь відомо, і передаються по каналах зв'язку приймачів споживача. Це і є диференціальної метод GPS.
Принцип роботи DGPS простий. Якщо два приймача розташовані близько один до одного, близько 100-200 км, у них буде така ж кількість помилок і їх сигнали будуть проходити крізь ті ж атмосферні умови. Тому використовують два приймача, один розташований у відомій точці (його називають базовою станцією), і приймає приймач (приймальник-ровер). Базовий приймач зберігає дані про місце розташування в пам'яті або на комп'ютері, а приймач-ровер зберігає дані, отримані з поля в бортовому запам'ятовуючому пристрої або на зовнішньому пристрої зберігання даних. Комп'ютер порівнює дані, отримані базовим приймачем з супутника з фактичними, розрахованими даними базового приймача і визначає масштаб помилок. Коли дані, отримані з приймача-ровера, завантажуються в комп'ютер, програмне забезпечення вносить поправки до них і коригує дані приймальника-ровера. Цей метод називається методом корекції координат, який використовується в польових дослідженнях даної наукової праці. Цей метод, забезпечуючи гарне точність, має деякі обмеження та недоліки:
1 - Необхідно два приймача (отже збільшуються витрати) або доступ до даних базової станції в межах 200 кілометрів від приймача-ровера.
2 - Цей метод не може передавати отримані дані в режимі реального часу.
3 - Приймачі та базової станції, і приймача-ровера повинні працювати за одним і тим же супутникам, в іншому випадку дані будуть некоректними.
4 - І ще один фактор, який необхідно враховувати: що за кожну годину, проведений у поле для збору даних, потрібно витратити ще близько години на коригування координат.
Ще одне питання, яке ми не можемо не розглянути - це метод кодового відповідності.
Отже, метод кодового узгодження відповідності допомагає визначити, скільки часу буде потрібно сигналам пройти від супутників до приймачів. Якщо час проходження сигналів відомо, відповідні відстані до супутників можуть бути розраховані за допомогою відповідного рівняння. Якщо відома відстань від одного супутника, в зоні дії від свого місця розташування буде спроектована сфера, на якій знаходиться приймач. Якщо визначається зона дії двох супутників, в результаті ми маємо дві пересічні сфери. Лінія перетину двох сфер є коло. Таким чином, дві зони дії від двох супутників формують коло. Тепер, якщо додати зону дії для третього супутника, буде сформована додаткові сфера, яка, коли перетнеться з однією з двох сфер, сформує ще одну окружність перетину. Перетин двох кіл дає дві можливі точки для розташування приймача. Використання "насіння позиції", яка знаходиться в декількох сотнях кілометрів від місця розташування приймача, швидко усуне одну з цих двох точок.
Однак для того, щоб отримати вимірювання в реальному часі необхідно враховувати систематичну помилку (відому як зміщення) у годинах і заломлення хвилі, коли вона проходить крізь атмосферу Землі. У розглянутому прикладі зміщення годин приймача однаково для всіх трьох діяльностей, так як один і той же приймач вимірює кожну дальність. Застосувавши дані про дальність четвертого супутника, зміщення годин приймача може бути математично розраховано. Таке рішення дозволяє приймачів мати менш точні (і менш дорогі) годинники.
Крім згадуваних вище, існує ще кілька джерел помилок, які впливають на сигнали супутника. Через зміщення годин приймачів і супутників та інших джерел помилок, що спостерігається дальність від супутника до приймача не є істинною дальністю, і тому вона називається псевдодальность.
Заломлення істотно впливає на точність наших вимірів.
Як відомо, швидкості електромагнітних хвиль змінюються, коли вони проходять через різні види середовищ з різними індексами заломлення. Атмосфера, як правило, поділяється на шари. Підшаром атмосфери, які мають аналогічний склад і властивості відомі як сфери. Прикордонні шари між сферами називаються паузами. Дві сфери, які мають найбільший вплив на сигнали GPS, є тропосфера і іоносфера. Тропосфера є самою нижньою частиною атмосфери, і, як відомо, поширюється до 10-12 км у висоту. Тропопауза відділяє тропосферу від стратосфери. Стратосфера має висоту до 50 км. Комбіноване заломлення (рефракція) у стратосфері, тропопаузе і тропосфері відомо, як тропосферний рефракція (заломлення).
В атмосфері існує ще кілька шарів з висотою вище 50 км. Але одним з найбільш цікавим шаром для роботи GPS є іоносфера, яка простягається від 50-1500 км над землею. Коли сигнали GPS проходять через іоносферу і тропосферу, вони заломлюються. Тому виникають помилки GPS щодо дальності, як і тимчасові помилки, і це є однією з причин, чому вимірювані дальності називаються псевдодальностямі.
Іоносфера складається головним чином з іонів - позитивно заряджених атомів і молекул, вільних негативно заряджених електронів. Вільні електрони впливають на поширення електромагнітних хвиль. Число іонів в будь-який даний момент часу в іоносфері залежить від ультрафіолетового випромінювання Сонця. Сонячна спалах може різко збільшити кількість іонів в іоносфері, і тому може бути причиною для занепокоєння при роботі з GPS в періоди високої сонячної активності, які відбуваються кожні 11 років.
Перевага розташування супутників на висоті приблизно 20200 км над поверхнею Землі полягає в тому, що сигнали з одного супутника надходять на два різні приймача, проходять через майже таку ж атмосферу. Отже, атмосфера має аналогічний вплив на сигнали, і цей вплив можна виключити за допомогою математичних методів.
Що таке кінематичний метод GPS у режимі реального часу?
Методи, подібні DGPS, також можуть бути використані з вимірами по фазі несучої частоти сигналу для усунення помилок. Цей метод називається кінематичний метод (RTK) за допомогою GPS досліджень, в якому також необхідне одночасне використання двох або декількох приймачів. Сигнали повинні бути одночасно зібрані всіма приймачами, не менше з чотирьох загальних супутників протягом всього процесу вимірювання. Кінематичний метод GPS дослідження показує кращі результати при використанні двочастотні приймачів, проте одночастотні приймачі цілком можуть бути придатні для даного методу. Цей метод допомагає визначити місце розташування з точністю до декількох сантиметрів, що робить його необхідним для досягнення цілей у геодезичних вишукувань, картографії та спостереженнях.
Так як координати базової станції відомі, за допомогою кінематичного методу (RTK) GPS зйомки обчислюємо поправки псевдодальності (PRC) за допомогою комп'ютера. Тепер, коли поправки псевдодальності визначені, вони використовуються рухомими приймачами для коректування своїх псевдодальностей.
Датчик з постійним скануванням
Датчик з постійним скануванням заснований на використанні приладів з зарядовим зв'язком (ПЗЗ) для вимірювання енергії електромагнітного поля. Матриця ПЗС складається з фоточутливих напівпровідникових детекторів. Величина одного елемента становить 5 мікрон. Сьогодні двовимірні матриці ПЗС широко використовуються в цифрових фотокамерах і відеокамерах. Матриці ПЗС, що використовуються в галузі дистанційного вимірювання, є більш чутливими і мають більшу роздільну здатність. Перший супутниковий датчик, в якому використовувалася ця технологія, називався SPOT-1.
Високоразрешающая апаратура видимого діапазону (HRV). В основу роботи датчиків з високою роздільною здатністю, таких як IKONOS і Orb View-3, покладений принцип постійного сканування.
Датчик з постійним скануванням за один раз записує одну суцільну лінію. Основною перевагою даного виду датчика над іншими є те, що кожна позиція (піксель) у лінії має свій власний детектор. Це дозволяє отримати більш тривалий період вимірювань на певній території досліджень, в результаті чого виникає менше шуму при відносно стабільній геометрії. Так як матриця приладу з зарядовим зв'язком створює зображення шляхом сканування суцільних ліній уздовж напрямку руху платформи, датчик з постійним скануванням також називається датчиком з траєкторних сканування.
У датчиках з постійним скануванням немає скануючого дзеркала, і тому вони мають більш високу ступінь надійності і більш тривалий термін служби, на відміну від їхніх попередників. Ось чому, поряд з відмінними геометричними властивостями, датчики з постійним скануванням широко використовуються в супутникових дистанційних вимірах.
Геометричні характеристики сканера вздовж смуги польоту
Для кожної окремої лінії сканери вздовж смуги польоту мають таке ж геометрична побудова, що й на аерофотознімки, які мають центральну проекцію. Завдяки центральної проекції зображення, отримані з допомогою сканерів вздовж смуги польоту, схильні в меншій мірі геометричних спотворень, ніж зображення, отримані з сканерів поперек смуги польоту. У разі рівнинній місцевості та обмеженою сумарною зони огляду (FOV), масштаб такий же, як лінія, отримана в результаті рівновіддалених пікселів. Концепція індивідуального сектору огляду (IFOV) не може бути застосована до сканерів вздовж смуги польоту.
Більшість сканерів вздовж смуги польоту мають здатність спостереження, відмінне від Надіра. У такому випадку, сканер може бути направлений в райони, вправо або вліво від траекторної сканування в поперечному напрямку, або в напрямку руху. Ця особливість має ряд переваг. По-перше, сканер може бути використаний для спостереження територій, які не в точці Надіра супутника, що дозволяє скоротити час між послідовними спостереженнями (періоди між повторними вимірами). По-друге, даний сканер може бути використаний для зйомки території, яка не покрита хмарами в даний конкретний момент. І, нарешті, спостереження, відмінне від Надіра використовується для виробництва стереозображень, [17]. При виробництві стереопари зображень з використанням поперечного стереонаблюденія, необхідно друге зображення, отримане з іншого орбіти. При використанні стереонаблюденія в напрямку руху, друге зображення може бути зроблена відразу ж після першого зображення тим же сканером на тій же орбіті. Це означає, що зображення зроблені майже в той же самий час, в тих же умовах, наприклад таких, як сезон, погода і рослинна фенологія. Застосовуючи спостереження відмінне від Надіра, подібно перспективної аерофототопографіческой зйомці, масштаб зображення може змінюватися і тому повинен бути відкоректований.
Як у сканерах поперек смуги польоту, так і в сканерах вздовж смуги польоту відбувається інтегрування за часом. Розглянемо рухому платформу зі сканером вздовж смуги польоту. Кожен елемент приладу з лінійкою ПЗС (CCD), вимірює енергію, пов'язану з невеликою територією під платформою. З просторової роздільної способностью10м і швидкістю ходу 6,5 км / с, кожні 1,5 мілісекунди (10м / 6,5 км / с) зареєстрована енергія (Вт) вимірюється для визначення DN-значення для всіх пікселів вздовж лінії.
Система Ikonos з високою роздільною здатністю
Ikonos був першим комерційним супутником з високою роздільною здатністю, який був виведений на орбіту. Ikonos належить американській компанії Space imaging, що спеціалізується на спостереженнях за земною поверхнею. Існують і інші комерційні супутники з високим ступенем дозволу, наприклад, Orb View-3 "(запущений в 2003 році, належить компанії Orblmage), QuickBird (запущений в 2001 році, власність компанії Earth-Watch) і EROS-A1" (запущений в 2000 році, власник супутника компанії West Indian Space). Ikonos був запущений у вересні 1999 року, а систематизовані дані почали надходити зі супутника з березня 2000 року [18].
Оптичний сканер, встановлений на супутнику Ikonos , заснований на принципі сканування вздовж смуги польоту і може одночасно прийняти панхроматичного і многоспектральние зображення. Крім того, сканер має високою роздільною здатністю по спектру в наступних спектральних діапазонах: 1-метрових панхроматичного (чорно-білих) і в 4-метрових мультиспектральних зображеннях, а також має високу радіометричне дозвіл, використовуючи 11-бітне квантування. Очікується, що в довгостроковій перспективі, 50% аерофотозйомки будуть замінені зображеннями з високою роздільною здатністю, отриманими з космосу, і що цифрові аерофотокамери в значній мірі замінять існуючу в даний час аерофототопографіческую зйомку. Одна з перших завдань для системи Ikonos - отримати високоразрешітельние зображення всіх великих міст США. Раніше, можливості картування і моніторингу міських районів з космосу, і не тільки в Америці, були досить обмежені.
Дані, отримані з Ikonos, можуть бути використані для малого та середнього масштабу топографічної зйомки, а також не тільки для складання нових карт, а також для оновлення існуючих топографічних карт, що і є метою даної наукової роботи.
Висновок
Перетворення даних є дуже важливим етапом для оновлення карт. Без цього перетворення процес оновлення не може бути здійснений належним чином, так як існує відмінність між даними карти і даними космічних знімків.
Класифікація супервізорних зображень є найбільш точною для топографічних відомостей, ніж старі карти і супутникові зображення. А так як дозвіл отриманих зображень і растрів збільшується, буде підвищуватися і точність класифікації, отже оновлена карта буде точна.
Процес оновлення карт з топографічними відомостями занадто складний, і він не може бути повністю автоматизований. Існуючі автоматизовані системи та інструменти дистанційного зондування можуть значною мірою допомогти людині, але вони не в змозі замінити його.
Максимальний Класифікатор Вірогідність - найбільш часто використовуваний класифікатор, ніж який-небудь параметричний класифікатор, і він найкращим чином підходить для точної класифікації. Тому ми можемо припустити, що вхідні дані мають нормальний розподіл і вони незалежні, як показано при дослідженні території в місті Кербела.
Використання мультівременних зображень для індивідуалізації інформаційних класів може допомогти усунути плутанину в класифікації.
Определеніе векторної придатності даних для оновлення топографічних карт полягає в математичному обчисленні топографічних об'єктів, отриманих з вихідних даних, а також з супутникових зображень.
Використання багатоспектральних зображень Ikonose дозволяє нам оновити карти великих і малих масштабів.
Для оновлення однієї карти з масштабом 1:50,000 нам необхідно мати семи зображень, отриманий із супутника Ikonos.
Литература
- C.Armenakis, CHANGE DETECTION METHODS FOR THE REVISION OF TOPOGRAPHIC DATABASES, Center for Topographic Information, Geometrics Canada, Natural Resources Canada.
- Christopher Joseph Pal, A Probabilistic Approach to Image Feature Extraction, Segmentation and Interpretation, M.Sc., Thesis, University of Waterloo.
- David Holland, Paul Marshall, UPDATING MAPS IN A WELL-MAPPED COUNTRY USING HIGH RESOLUTION SATELLITE IMAGERY, Ordnance Survey, Romsey Road, Southampton.
- . Ehab NABIL NASSIF, A Unified System of Transformation Parameters for Combining Different Geodetic Networks in Egypt.
- Floyd F. Sabins (2000), REMOT SENSING PRICIPLES AND INTERPRETATION, university of California.
- ITC Educational Textbooks Series (2004), Principles of Geographic Information System.
- J.Grodecki and G.Dial, IKONOS GEOMETRIC ACCURACY.
- . Manon Carignan and Guy Dumoulin, TOPOGRAPHIC MAPPING AT THE 1:100,000 SCALE, bureau E-304, Charlesbourg.
- Michael Kostiuk, MA Geography, USING REMOTE SENSING DATA TO DETECT SEA LEVEL CHANGE, Ontario, Canada.
- Mohamed H.D, Use of Satellite Imagery for Digital Map Production & Revision, Mcs. Thesis, 1999. University of Baghdad.
- R. Thomas, DIGITAL MAP UPDATING FROM SATELLITE IMAGERY, Ramonville Saint Agne Cedex, France(2005).
- Dr. Richard A. Snay and Dr. Tom?s Soler, Modern Terrestrial Reference Systems PART 3: WGS 84 and ITRS, PROFESSIONAL SURVEYOR March 2000.