


Китман Мехди
Факультет электротехнический
Кафедра электропривод и автоматизация промышленых установок
Специальность «Електромеханические системы автоматизации и электропривод»
ИССЛЕДОВАНИЯ ЭНЕРГЕТИЧЕСКИХ ХАРАКТЕРИСТИК АСИНХРОННОГО ЭЛЕКТРОПРИВОДОВ ПРИ РАЗЛИЧНЫХ СПОСАБАХ УПРАВЛЕНИЯ.
Научный руководитель:к.т.н., доц. Чекавский Глеб Станиславович
Энергопотребление Асинхронного электропривода и меры по его снижению
Содержание
1.Введение
2.ОСНОВНАЯ ЧАСТЬ
3.ЗАКЛЮЧИТЕЛЬНАЯ ЧАСТЬ
4.Литература
1.Введение
В настоящее время наиболее широкое применение в промышленности приобрел асинхронный электропривод (ЭП), как в нерегулируемом (релейно-контакторном), так и в регулируемом (параметрическом, частотном) вариантах. Это объясняется простотой конструкции, относительно низкой стоимостью и высокой надежностью такого асинхронного двигателя (АД). Необходимость внедрения регулируемых ЭП для промышленных установок обусловлено такими факторами, как повышение эксплуатационного к.п.д. агрегата; повышение качества выпускаемой продукции за счет применения средств регулирования и автоматизации технологического процесса; переход от частичной к комплексной автоматизации производственных процессов и др. В связи с повышением цен на энергоносители и на электроэнергию в целом, а также ограниченными возможностями повышения мощности энергогенерирующих установок, проблема энергосбережения, в т.ч. снижения энергопотребления, приобретает особенную актуальность.
2.ОСНОВНАЯ ЧАСТЬ
В настоящем докладе обозначаются пути уменьшения энергопотребления асинхронным ЭП и варианты их реализации. Обобщенная энергетическая диаграмма передачи мощности от трехфазной электросети к исполнительному органу (ИО) механизма представлена на рис.1 Рисунок 1 – Диаграмма передачи мощности от сети к исполнительному органу механизма. ПЭ – силовой преобразователь энергии, МП – механическая передача.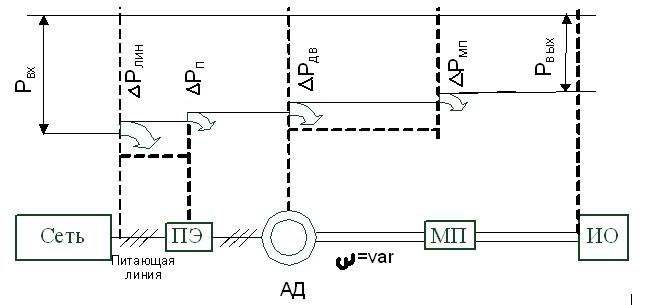 На диаграмме обозначены основные виды мощности и потерь мощности, отражающие только главные черты энергетического процесса: Рвх, Рвых – потребляемая (входная) и полезная (выходная) мощности соответственно; ?Рлин, ?Рп, ?Рдв, ?Рмп – потери мощности в питающей линии, силовом электрическом преобразователе, в двигателе (включая подводящий силовой кабель) и механическом преобразователе соответственно. Предполагаем, что электромеханическая система работает в штатных режимах.
Потребляемая мощность Рвх пропорциональна произведению двух электрических величин: фазных напряжения Uф и тока Іф с учетом угла сдвига f между первыми гармониками мгновенных напряжения и тока фазы:
Рвх=3 Uф Iфcos(f). (1)
Потери в питающей линии deltaРлин зависят от активного сопротивления проводника Rлин и полного тока линии Iлин:
deltaPлин=3 I2лин (t) Rлин. (2)
Потери мощности в двигателе deltaPдв выражаются его к.п.д.:
На диаграмме обозначены основные виды мощности и потерь мощности, отражающие только главные черты энергетического процесса: Рвх, Рвых – потребляемая (входная) и полезная (выходная) мощности соответственно; ?Рлин, ?Рп, ?Рдв, ?Рмп – потери мощности в питающей линии, силовом электрическом преобразователе, в двигателе (включая подводящий силовой кабель) и механическом преобразователе соответственно. Предполагаем, что электромеханическая система работает в штатных режимах.
Потребляемая мощность Рвх пропорциональна произведению двух электрических величин: фазных напряжения Uф и тока Іф с учетом угла сдвига f между первыми гармониками мгновенных напряжения и тока фазы:
Рвх=3 Uф Iфcos(f). (1)
Потери в питающей линии deltaРлин зависят от активного сопротивления проводника Rлин и полного тока линии Iлин:
deltaPлин=3 I2лин (t) Rлин. (2)
Потери мощности в двигателе deltaPдв выражаются его к.п.д.:
 (3)
и определяются потерями в отдельных элементах двигателя. Энергетическая диаграмма АД представлена на рис.2.
(3)
и определяются потерями в отдельных элементах двигателя. Энергетическая диаграмма АД представлена на рис.2.
 Полезная механическая мощность Р2 всегда меньше потребляемой Р1=3 Uф.deltaвIф.deltaвcos(?дв) из-за наличия потерь, которые условно можно разделить на электромагнитные (тепловые) и механические.
Среди электромагнитных потерь в статоре выделим электрические потери в обмотке статора: ?PМ1=3I2ф.дв R1 и потери в стали статора deltaPс1 на гистерезис и вихревые токи.
Оставшаяся мощность – электромагнитная РЭМ=Р1–deltaPм1–deltaPс1 передается ротору через воздушный зазор. Мощность, получаемая ротором, частично расходуется на покрытие потерь в роторе (deltaPМ2), оставшаяся часть Р2’’ передается ротору:
РЭМ=Р2’’+deltaPм2. (4)
Помимо потерь в меди, обратим внимание и на потери в стали ротора deltaPс2, которые с учетом того, что сердечник ротора при работе АД перемагничивается с малой частотой F2=F1, пропорциональной скольжению s, являются относительно небольшими (на диаграмме рис.2 они не показаны).
Отметим, что не вся мощность Р2’’ является полезной, поскольку часть ее расходуется на покрытие механических потерь ?Pмех от трения в подшипниках и вращающихся частей машины о воздух, а также добавочных потерь deltaPдоб от пульсаций потока вследствие зубчатости статора и ротора, трудно поддающихся учету. Оставшаяся часть
Р2’=Р2’’–deltaPмех–deltaPдоб(5)
также не является полезной в полной мере ввиду наличия непроизводительных потерь механической мощности в передаче и собственно в ИО. Величина собственно полезной мощности
Р2=Р2’–deltaPмп (6)
и определяет энергетическую эффективность электромеханического преобразования энергии по диаграмме рис.1.
Полезная механическая мощность Р2 всегда меньше потребляемой Р1=3 Uф.deltaвIф.deltaвcos(?дв) из-за наличия потерь, которые условно можно разделить на электромагнитные (тепловые) и механические.
Среди электромагнитных потерь в статоре выделим электрические потери в обмотке статора: ?PМ1=3I2ф.дв R1 и потери в стали статора deltaPс1 на гистерезис и вихревые токи.
Оставшаяся мощность – электромагнитная РЭМ=Р1–deltaPм1–deltaPс1 передается ротору через воздушный зазор. Мощность, получаемая ротором, частично расходуется на покрытие потерь в роторе (deltaPМ2), оставшаяся часть Р2’’ передается ротору:
РЭМ=Р2’’+deltaPм2. (4)
Помимо потерь в меди, обратим внимание и на потери в стали ротора deltaPс2, которые с учетом того, что сердечник ротора при работе АД перемагничивается с малой частотой F2=F1, пропорциональной скольжению s, являются относительно небольшими (на диаграмме рис.2 они не показаны).
Отметим, что не вся мощность Р2’’ является полезной, поскольку часть ее расходуется на покрытие механических потерь ?Pмех от трения в подшипниках и вращающихся частей машины о воздух, а также добавочных потерь deltaPдоб от пульсаций потока вследствие зубчатости статора и ротора, трудно поддающихся учету. Оставшаяся часть
Р2’=Р2’’–deltaPмех–deltaPдоб(5)
также не является полезной в полной мере ввиду наличия непроизводительных потерь механической мощности в передаче и собственно в ИО. Величина собственно полезной мощности
Р2=Р2’–deltaPмп (6)
и определяет энергетическую эффективность электромеханического преобразования энергии по диаграмме рис.1.
3.ЗАКЛЮЧИТЕЛЬНАЯ ЧАСТЬ
Анализируя выражения (1) – (6), можно определить основные группы мероприятий, реализация которых может привести к повышению энергетической эффективности, которые могут быть разделены на вопросы, решаемые на этапе проектирования или модернизации системы, и вопросы, реализуемые после пуска системы 1) Мероприятия, направленные на снижение потерь в первичной по отношению к двигателю цепи (например, выбор ПЭ, сечения линии, меры по снижению полного потребляемого тока и др.); 2) Мероприятия, направленные на снижение потерь в двигателе, связанные с оптимизацией режимов его работы (совершенствование алгоритма управления ПЭ и АД); 3) Мероприятия по выбору параметров механической части.;
Литература
- Шавелкин А.А. Энергосберегающий высоковольтный преобразователь частоты с прямым управлением асинхронным двигателем / Шавелкин А.А., Сажин В.А., Прокопенко И.В. // Науково-практична конференція "Донбас 2020: наука і техніка - виробництву", 5-6 лютого 2002 р., Донецьк.
- Борисенко В.Ф. Автоматизированный электропривод переменного тока механизма вращения металлоформы машины для центробежного литья чугунных труб / Борисенко В.Ф., Войтенко Е.Е., Чекавский Г.С., Борисенко И.В. // Науково-практична конференція "Донбас 2020: наука і техніка - виробництву", 5-6 лютого 2002 р., Донецьк.
- Півняк Г.Г., Бешта О.С., Балахонцев О.В., Худ олій С.С. Дискретна модель частотно-регульованого асинхронного електропривода для задач ідентифікації // Вісник НТУ «ХПІ». Збірник наукових праць. Тематичний збірник наукових праць «Проблеми автоматизованого електроприводу. Теорія і практика». – Харків: НТУ «ХПІ», 2003, №10, т.1 – С. 34-36.
- Андрющенко О.А., Шевченко С.Б. Улучшение энергетики асинхронного электропривода с векторным управлением // Вісник НТУ «ХПІ». Збірник наукових праць. Тематичний збірник наукових праць «Проблеми автоматизованого електроприводу. Теорія і практика». – Харків: НТУ «ХПІ», 2005, №45 – С. 394-395.
- Браславский И.Я.Энергосберегающий асинхронный электропривод: Учеб. пособие / И. Я. Браславский, З. Ш. Ишматов, В. Н. Поляков; под ред. И.Я. Браславского. - М. : ИЦ «Академия», 2004. - 256 с.
- Ильинский Н.Ф. Электропривод: энерго- и ресурсосбережение: учеб. пособие для студ. высш. учеб. заведений / Н.Ф. Ильинский, В.В. Москаленко. – М.: Издательский центр «Академия», 2008-208с.
- Виноградов А.Б. Векторное управление электроприводами переменного тока / ГОУВПО «Ивановский государственный энергетический университет имени В.И. Ленина». – Иваново, 2008. – 298 с.
Резюме| Автобиография| Ссылки| Библиотека| Отчет о поиске| Индивидуальное задание