Назад
в библиотеку
Моделирование трехзвенного
робота-манипулятора
Автор:
Tarek M. Sobh, Mohamed Dekhil,
Thomas C. Henderson, and Anil Sabbavarapu
Автор перевода: С.В. Павлов
Источник: Кафедра
компьютерных наук и инженерии
Университет Бриджпорта
Бриджпорт, США
и
Кафедра компьютерных наук
Университет Юты
Солт Лейк Сити, США
Реферат
В этой статье представлены
этапы проектирования и строительства прототипа трехзвенного робота
манипулятора, построенного как часть исследовательского проекта по
созданию моделей режимов роботов манипуляторов. Создание этого робота
позволило нам определить подсистемы и интерфейсы необходимые для
создания модели окружающей среды, в условиях которой, был получен опыт
работы с реальными проблемами и трудностями. Кроме того, этот робот
используется в качестве учебного пособия в области робототехники и
управления.
1 Введение
Изучение роботов в большинстве
технических ВУЗов проводится с практической стороны, и как правило
студенты в конечном итоге имеют теоретические основы и математические
обоснования, и могут даже написать программы моделирования, но они не
получат возможность применить на практике, то чему они научились на
реальных роботах. Это связано с тем, что большинство роботов доступных
на рынке, либо слишком сложны, продвинуты и дороги (например,
специализированные промышленные роботы), либо игрушечные роботы,
которые являются слишком тривиальными и не дают тот уровень
функциональных возможностей, необходимых для демонстрации основных
концепций построения и управления роботами. Одной из наших целей в этом
проекте, было создание робота, который будет простым, гибким и легко
используемым, а так же совместимым с любой рабочей станцией или
персональным компьютером, и в то же время, способен продемонстрировать
концепции разработки и управления. Мы также постарались сохранить его
цену как можно более доступной для любого технического ВУЗа или
промышленной организации. Мы считаем, что основным вкладом в работу по
созданию URK (Utah Robot Kit), является прототип трехзвенного робота,
имеющий небольшие размеры и разумный вес, что позволяет размещать его в
небольших лабораториях. URK может быть подключен к любой рабочей
станции или ПК через стандартный последовательный интерфейс RS232, и
контролируется при помощи программного пакета с графическим
пользовательским интерфейсом. Этот программируемый контроллер применяет
отдельный ПИД-регулятор для каждого звена, который не требует знания
параметров робота. Therfore, программа которую можно использовать для
управления любой электромеханической системой, которой можно управлять
при помощи физического ПИД-регулятора. Интерфейс позволяет пользователю
вносить изменения в любые параметры управления и контроля поведения
системы при помощи графиков и трехмерного представления текущего
положения робота.
2 Начальные условия и связь с
работой
Управление манипуляторами и их
моделирование это процесс, который включает в себя большое количество
математических уравнений. Для более эффективного выполнения необходимых
вычислений, лучше разделить их на отдельные модульные элементы, где
каждый элемент выполняет определенные задачи. Наиболее важными
элементами, как описано в [2], являются элементы кинематики, обратной
кинематики, динамики, и замкнутых систем подчиненного регулирования.
2.1 Модульные элементы робота
Было проведено много
исследований по автоматизированию расчетов прямой и обратной
кинематики. Программный пакет SRAST, который решает прямую и обратную
задачу кинематики для n-степеней свободы манипулятора был разработан
авторами [5]. Другой способ нахождения символьного решения
обратной
задачи кинематики был предложен в [11]. Келмар и Хосла предложили свой
метод автоматической генерации прямой и обратной кинематики для систем
манипуляторов с изменяющейся конфигурацией [7].
Наука о силах необходимых для
того, чтобы вызвать движение
называется
динамикой. Есть несколько алгоритмов для расчета динамики манипулятора.
некоторые из них были предложены в [8, 9, 10], на основе
многопроцессорных контроллеров и конвейерной архитектуре для ускорения
вычислений.
В большинстве
систем для позиционирования и отслеживания траектории
используется системы подчиненного регулирования с обратной связью.
Обычно на каждом сочленении применяется датчик положения, и есть привод
для каждого звена манипулятора. Показания с датчиков будут обратной
связью для системы управления. Выбирая соответствующие коэффициенты, мы
можем контролировать поведение выходной функции, представляющей собой
фактическую траекторию. Сведение к минимуму ошибки между желаемой и
реальной траекторией является нашей главной заботой. На рисунке 1
показана блок-схема контроллера, а также роль каждого из элементов
робота в системе.
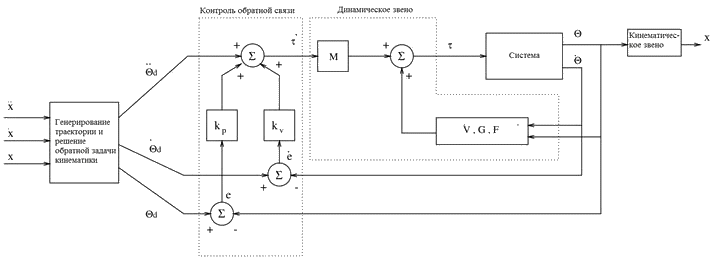
Рисунок
1 – Блок-схема
контроллера робота-манипулятора
2.2 Локальное ПД управление в
функции динамических уравнений робота
Большинство алгоритмов
замкнутых систем, используемых в современных системах управления,
основываются на пропорционально-дифференцирующих (ПД) регуляторах. Для
промышленных роботов, локальные обратные связи выбираются отдельно для
каждого сочленения. Некоторые идеи были предложены для повышения
удобства позиционирования. Одна из идей заключается в добавлении
апериодической составляющей, используемой в анализе частотных
характеристик[1]. Другой метод заключается в создании цикла,
стабилизирующего контроллер с помощью нескольких переменных ПД
регулятора, и внешний контроллер слежения за циклом использования
нескольких переменных ПИД регулятора[12]. В общем, используя локальные
замкнутые ПД контуры могут дать приемлемую точность при отслеживании
движения. Было доказано, что при использовании линейной обратной связи
ПД закон полезен для определения местоположения и траектории[6].
3. Моделирование трехзвенного
робота
3.1 Анализ этапов
Этот проект был начат с
изучения множества конфигураций роботов и анализа типов и количества
расчетов, участвующих в каждой из моделей управления роботом
(кинематикой, обратно-кинематической, динамической, планирования
траектории, замкнутого управления и моделирования). На этом этапе был
получен рабочий общий пример трехзвенного робота для вычисления
кинематики, обратной кинематики, динамики и планирования траектории;
они были связаны с общей моделью двигателя и алгоритмом управления им.
Данное исследование позволило определить характеристики роботов,
необходимые для выполнения определенных задач.
3.2 Разработка регуляторов
Первым шагом в разработке
регуляторов для робота-манипулятора является решение его кинематики,
обратной кинематики, динамики и управления с обратной связью, которые
будут использоваться. Кроме того на данном этапе должны быть определены
типы входных данных и пользовательский интерфейс. Мы также должны знать
такие параметры робота как: длины звеньев, их массы, моменты инерции,
расстояния между суставами, конфигурацию робота, и тип сочленения.
Переменные параметры должны быть заданы так, чтобы контроллер мог
использоваться без каких либо изменений для различных конфигураций.
3.3 Моделирование
Программа моделирования была
реализована для изучения работы каждого звена, и влияния изменения
частоты обновления в системе. Кроме того она помогла приближенно
определить требуемые крутящие моменты и напряжения, а также тип датчика
необходимого для определения максимальной скорости. Мы не использовали
графический интерфейс симулятора, так как графики процедуры охватывают
большой интервал времени и могут ввести в заблуждение показатели
скорости.
3.4 Моделирование ПИД
регулятора
Как уже упоминалось в разделе
2.2, линейный закон управления с обратной связью может быть использован
для управления роботом-манипулятором для позиционирования и
отслеживания траектории. Для этих целей был разработан ПИД регулятор,
для тестирования и анализа поведения робота при данном способе
управления. Использование этой системы управления помогло нам избежать
решения задачи определения параметров нашего прототипа трехзвенного
робота. Один из самых сложных параметров – матрица моментов
инерции для каждого звена, особенно если звено имеет сложную форму.
3.5 Построение робота
Сборка механических и
электрических комплектующих был произведен в Advanced Manufacturing Lab
(AML) при помощи Mircea Cormos и Prof. Stanford Meek. В этой
конструкции последнее звено подвижно, так что могут быть использованы
различные конфигурации робота (см. рис. 2).
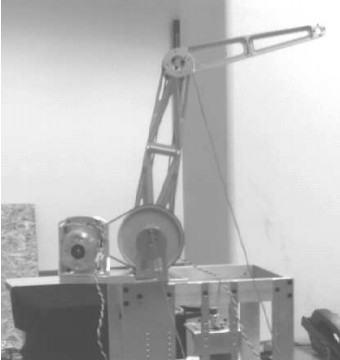
Рисунок
2 – Трехзвенный робот-манипулятор
Используется три привода (для
каждого из звеньев), а также по паре датчиков (позиции и скорости),
которые информируют о состоянии каждого звена в контуре управления.
Этот робот может управляться с
помощью аналогового управления путем взаимодействия с ПИД регулятором.
Цифровое управление может
осуществляться с использованием рабочих станций или персонального
компьютера через стандартный интерфейс RS232. ЦАП и АЦП должны быть
оснащены усилителями соответствующей мощности. Краткое описание этой
конструкции можно найти в [3,4].
4. Тестирование и результаты
4.1 Модель трехзвенного
манипулятора
Эта модель была использована.
Что бы дать некоторые оценки необходимых расчетных параметров, таких
как длина звена, присоединение массы, скорость обновления, коэффициенты
обратных связей и т.д. эта модель использует приблизительную
динамическую модель робота, и это позволяет изменять параметры
конструкции.
4.2 Программирование ПИД
контроллера
Программное обеспечение
регулятора было реализовано для трехзвенного робота. Этот контроллер
использует простой локальный ПИД алгоритм управления и имитирует три
ПИД регулятора; по одному для каждого звена. Несколько экспериментов и
испытаний были проведены с использованием этого программного
обеспечения для изучения последствий изменения параметров.
Параметры, которые можно
изменять в этой программе:
- прямой коэффициент
- пропорциональный коэффициент
- дифферцирующий коэффициент
- интегральный коэффициент
- входная траектория
- частота обновления
В этих экспериментах программа
выполнялась на Sun SPARCStation-10, а АЦП был подключен к
последовательному порту рабочей станции. Одной из проблем с которой мы
столкнулись – медленный протокол чтения данных с датчика. Мы
старались исправить это изменением размера буфера или используемого
тайм-аута, но безуспешно. Это приводит к снижению точности
позиционирования робота. Мы смогли решить эту проблему на HP-700, и мы
достигли частоты обновления в 120 раз в секунду, что было хорошо для
нашего робота.
5. Заключение
Модель трехзвенного
робота-манипулятора была построена для определения необходимых
компонентов, для создания модели среды для элетро-механических систем в
целом, и для роботов-манипуляторов в частности. Локальный линейный ПД
регулятор с обратной связью был использован для задач позиционирования.
Графический пользовательский интерфейс был реализован для управления и
моделирования роботов. Этот робот был создан как учебное пособие, что
дает его простоту и управляемость.
Используемая литература
- CHEN, Y. Frequency
response
of discrete-time robot systems -
limitations of pd controllers and
improvements by lag-lead compensation. In IEEE Int. Conf. Robotics and
Automation (1987),
pp. 464–472.
- CRAIG, J. Introduction To
Robotics. Addison-Wesley, 1989.
- DEKHIL, M., SOBH, T. M., AND
HENDERSON, T. C. URK: Utah Robot Kit
- a 3-link robot
manipulator prototype. In IEEE Int. Conf. Robotics and Automation (May
1994).
- DEKHIL, M., SOBH, T. M.,
HENDERSON, T. C., AND MECKLENBURG, R.
Robotic prototyping
environment (progress report). Tech. Rep. UUCS-94-004, University of
Utah, Feb. 1994.
- HERRERA-BENDEZU, L. G., MU,
E., AND CAIN, J. T. Symbolic
computation of robot manipulator kinematics. In IEEE Int. Conf.
Robotics and Automation (1988), pp. 993–998.
- KAWAMURA, S., MIYAZAKI, F.,
AND ARIMOTO, S. Is a local linear pd
feedback control law
effictive for trajectory tracking of robot motion? In IEEE Int. Conf.
Robotics and Automation
(1988), pp. 1335–1340.
- KELMAR, L., AND KHOSLA, P.
K. Automatic generation of forward and
inverse kinematics for
a reconfigurable manipulator system. Journal of Robotic Systems 7, 4
(1990), pp. 599–619.
- LATHROP, R. H. Parallelism
in manipulator dynamics. Int. J.
Robotics Research 4, 2 (1985), pp.
80–102.
- LEE, C. S. G., AND CHANG, P.
R. Efficient parallel algorithms for
robot forward dynamics computation. In IEEE Int. Conf. Robotics and
Automation (1987), pp. 654–659.
- NIGAM, R., AND LEE, C. S. G.
A multiprocessor-based controller
for mechanical manipulators.
IEEE Journal of Robotics and Automation 1, 4 (1985), pp.
173–182.
- RIESELER, H., AND WAHL, F.
M. Fast symbolic computation of the
inverse kinematics of robots.
In IEEE Int. Conf. Robotics and Automation (1990), pp.
462–467.
- TAROKH, M., AND SERAJI, H. A
control scheme for trajectory
tracking of robot manipulators.
In IEEE Int. Conf. Robotics and Automation (1988), pp.
1192–1197.