
Abstract
L'introduction et le but des recherchesLe but du travail: étudier théoriquement et expérimentalement les moyens de la commande de la conduite du robot Koala à l'aide de la simulation, les connexions à l'ordinateur personnel et créer l'algorithme de la conclusion du flot optique pour l'orientation et pour éviter des obstacles par le robot mobile dans le couloir. ⇒ Dans le projet sur la commande autonome par le robot à roues Koala dans le milieu des locaux fermés et en plein air, on peut élaborer la perception visuelle, avec qui le robot avances selon le couloir aux frais du controle automatique de sa vitesse et de son espace libre jusqu'aux murs. ⇒ À l'étude de la conduite des insectes on ouvrait leurs certains moyens de l'orientation dans l'espace, ce qui on peut artificiellement reconstituer dans la robotique. Par exemple, les insectes ailés sont capables de se déplacer vite dans le milieu inconnu par la voie de l'extrait de l'information visuelle des mouvements personnels. Cette information visuelle peut etre utilisée dans la robotique comme la fonction du flot optique, c'est-à-dire le mouvement visible de la représentation des objets, mais pour les insectes – les fonctions contrastées projetées sur la rétine de l'insecte. Les insectes utilisent cela pour éviter les collisions, en suivant selon le couloir [1, 2]. Certains auteurs éprouvaient des robots à roues, à qui la vitesse par rapport à la terre était contr?lée par la voie de la comparaison des sommes de deux latéral flots optiques avec la valeur d'étalon (par ex. [8]), mais dans le travail donné on utilise une caméra digital de bord, c'est pourquoi on propose dans le futur le programme modelé de la navigation. 1. La description brève du robot KoalaLa description brève du robot Koala – le robot mobile à roues de la moyenne grandeur. Le robot est équipé de deux blocs selon trois roues latérales, à la vitesse maxima 0.4 m\s, les roues ont le rayon de 45 mm et sont établis sur les axes de 30 sm de la longueur, la commande par qui donne la possibilité du changement de la rotation et la vitesse du déplacement du robot. Puisqu'ils sont indépendants, le robot peut se tourner à la place. La masse totale est 3.6 kg (4 kg avec la batterie). Chaque moteur est équipé de l'encodeur incrémental, en lisant 5850 pulsations pour le tournant. Dans le but du contr?le Koala est assuré par le processeur Motorola 68331@22 MHZ. Pour diriger le robot, on peut envoyer les équipes de l'ordinateur personnel éloigné dans le port successif RS232, et le robot répond à n'importe quelle action, ou en envoyant les données en arrière (la lecture des encodeurs). On peut diriger les moteurs directement, en réglant le cycle du signal appliqué de la modulation de durée (MDD) de chaque moteur, ou indirectement dans les controllers mis de la position et la vitesse. Koala est équipé de 16 détecteurs infrarouges, chacun de qui peut mesurer l'éclat entourant ou la proximité du plus proche obstacle. Mais dans le travail donné les détecteurs infrarouges ne sont pas utilisés et sont remplacés par la caméra de bord travaillant en fonction du flot optique. Les représentations de la caméra sont faites dans la carte graphique liée à l'ordinateur personnel. Le controle et les algorithmes visuels se réalisent, en utilisant la langue C ++. 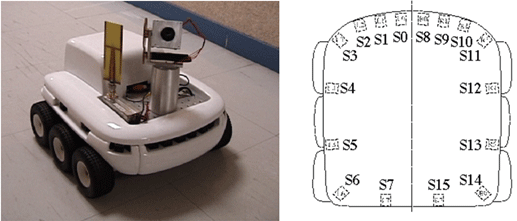
Figure 1 – Photo et schéma des détecteurs du robot Koala 2. L'équation du flot optiqueLe flot optique (FO) – est une représentation du mouvement visible des objets, les surfaces ou les bouts de la scène, re?u à la suite du déplacement de l'observateur (l'oeil ou la caméra) en ce qui concerne la scène. Les algorithmes fondés sur le flot optique, tels que l'enregistrement du mouvement, la segmentation des objets, le codage des mouvements et le compte du disparitete à stereo utilisent ce mouvement des objets, les surfaces et les bords [2]. Les méthodes fondées sur le flot optique, calculent le mouvement entre deux effectifs pris au moment du temps t et t+δt, dans chacun pixel, ils utilisent les dérivées partielles par temps et les coordonnées spatiales. Ces méthodes s'appellent différentiel, puisqu'ils sont fondés sur l'approche du signal par le segment de la série de Taylor; ainsi, ils utilisent les dérivées partielles par le temps et par les coordonnées spatiales. 
ou Vx, Vy sont x et y les composants de la vitesse du flot optique à I(x,y,t) En cela le pixel aux positions (x,y,t) avec l'intensité I(x,y,t) pour un cadre sera déplacé sur δx, δy et δt. L'équation recue contient deux inconnus et ne peut pas etre absolument calculé. La circonstance donnée est connue comme le problème de l'aperture. La tache est résolue par l'imposition des restrictions supplémentaires – la régularisation. Les algorithmes du flot optique non seulement définissent le champ du flot, mais aussi utilisent le flot optique à l'analyse de l'essence en trois dimensions et de la structure de la scène, ainsi que les mouvements 3D des objets et l'observateur concernant la scène. Le flot optique est utilisé dans la robotique dans tels domaines comme: la reconnaissance des objets, poursuite des objets, les définitions du mouvement et à la navigation du robot. Le flot optique est utilisé non seulement pour la définition du mouvement de l'observateur et les objets concernant la scène, mais aussi pour l'étude de la structure des objets. Puisque, la définition du mouvement et la création des cartes de la structure de l'environnement, sont la partie intégrante de la vue animale (humaine), la réalisation de cette disposition innée par les moyens de l'ordinateur est la partie intégrante de la vue informatique. HCependant, le problème des méthodes de la présence du mouvement est que dans le domaine de la vue informatique sans information supplémentaire on ne peut pas dire l'objet avance et l'observateur reste sur place, ou l'objet repose, mais l'observateur avance [2]. 3. La caméra digital FireWireLa caméra digitale embarqué est préférable au travail ultérieur au niveau du paiement par le volume total 400Мб FireWire les caméras, les spécifications correspondantes IIDC pour industriel non serré VGA de l'accueil de l’image, créé sur la base du chip de la caméra digitale Texas Instruments 1394 et les PZS-DÉTECTEURS Sony ® Wfine Fire-i™. Pour mon projet la caméra d'un tel type était accordée par l'Université Cergy-Pontoise (Laboratoire ETIS) dans le cadre de la collaboration avec DonNTU. 
Figure 2 – La caméra digitale Fire–i™ La caméra digitale embarqué Fire-i™ se nourrit de tension FireWire de la barre du courant continu des adaptateurs ou d'autres installations FireWire liées aux cables 6-de contact. Travaille avec n'importe quel participant IEEE-1394 PCI ou PCMCIA (CardBus) OHCI par l'adaptateur compatible ou n'importe quel ordinateur personnel de bureau/portatif ou Mac avec le soutien de FireWire inséré. 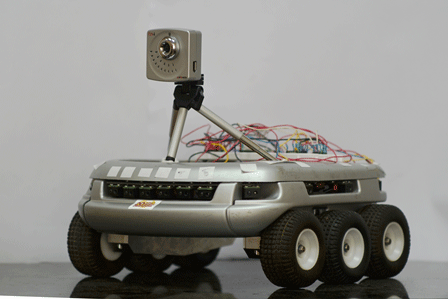
Figure 3 – Le robot "Koala" avec la caméra digitale embarqué Fire–i™ On présente la structure du travail du robot Koala au-dessous (est prise de [9], p. 84), qui contient le schéma bref des coopérations entre la caméra et le robot:
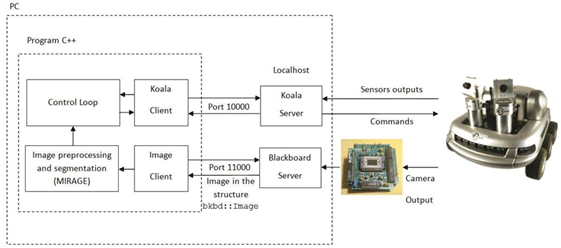
Figure 4 – Le schéma structural du robot Koala 4. La présentation de la commande du robot Koala dans le milieu de MatlabEn vue de la présentation de la commande du robot Koala dans le milieu de Matlab, on utilisait les fonctions principales et les équipes selon le réglage de la vitesse, la position, l'accélération des moteurs des roues de transmission. L’établissement de contact du robot et l'ordinateur était produite dans l'interface standard de la transmission successif de données RS232. Finalement nous avons re?u le diagramme de la mise en marche des roues avec de diverses valeurs de la vitesse et du temps de la dispersion selon chacun d'eux. Aussi sur le diagramme on montre la réaction à la résistance supplémentaire au mouvement mis à un des roues. 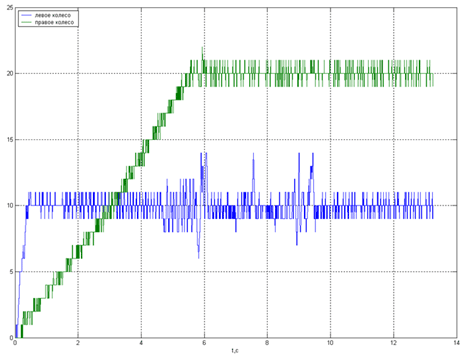
Figure 5 – L’accroissement de vitesse des moteurs des roues du robot Le texte du programme: 
L'animation: 6 images, la durée de chaque image – 100 ms, 35,9 KB 5. Demo “Tracking Cars Using Optical Flow” dans le milieu de MatlabÀ programme Matlab il y’a une série de demo-applications, auxquelles on utilise le flot optique pour la solution des diverses taches. Le demo–modèle “Tracking Cars Using Optical Flow” était pris comme l'exemple de l'application du flot optique. On faisait finalement quelques expériences très simples pour la compréhension du travail du FO, qui concernent les méthodes du calcul et des changements des paramètres du modèle. Mais il est nécessaire changer les paramètres pour chaque cas défini, quand il y’a les buts concrets de la simulation. Le modèle présenté au dessous sera utilisé comme la base pour la simulation dans mon travail. 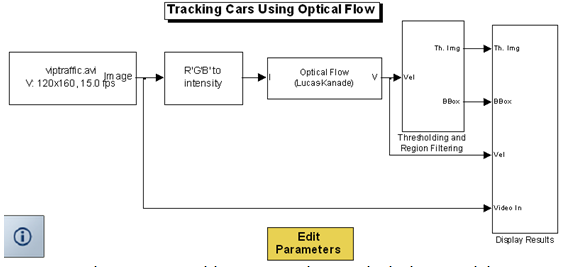
Figure 6 – Le modèle Tracking Cars Using Optical Flow 
Figure 7 – Les images décrivant le flot optique du mouvement des automobiles Les conclusions et les taches pour le futurÀ la rédaction du compte rendu donné le travail magistère est en voie de l'élaboration, c'est pourquoi nous exprimerons les taches principales de l'étude:
Références
|