Definition de l’automatique
Automatique: Qui fonctionne tout seul ou sans intervention humaine. Il existe deux domains d’intervention de l’automatique:
— Dans les sysemes a evenements discrets. On parle d’automatisme (sequence d’actions dans le temps). Exemples d’applications: les distributeurs automatiques, les ascenseurs, le montage automatique dans le milieu industriel, les feux de croisement, les passages a niveaux.
— Dans les syst`emes continus pour asservir et/ou commander des grandeurs physiques de facon precise et sans aide exterieure. Quelques exemples d’application: l’angle d’une fusee, la vitesse de rotation d’un lecteur CD, la position du bras dun robot, le pilotage automatique d’un avion.
Dans ce cour, nous ne nous interesserons qu’a l’automatique des systemes continus.
1.2 Principes de base
faire une contre-reaction ou un ”feedback”: reagir en fonction de ce qui est realise, connaissant ce qui est demande.
Ce principe nous l’utilisons tous les jours dans la plupart de nos actions. Pour conduire, nous devons regarder la route et sans cesse corriger la direction de la voiture meme s’il n’y a pas de virages.
1.2.1 Notion de systeme, de Boucle Ouverte (BO), de Boucle Fermee (BF)
А l’automatique peut s’appliquer a tout ce qui bouge, fonctionne, se transforme. L’objet d’application de l’automatique est appele systeme. Un systeme se caracterise par ses grandeurs d’entree et de sortie. Les grandeurs d’entree sont les grandeurs qui agissent sur le systeme. Il en existe de deux types:
commandes: celles que l’on peut maitriser
perturbations: celles que l’on ne peut pas maitriser.
Un systeme est en boucle ouverte lorsque la commande est elaboree sans l’aide de la connaissance des grandeurs de sortie: il n’y a pas de feedback. Dans le cas contraire, le systeme est dit en boucle fermee. La commande est alors fonction de la consigne (la valeur souhaitee en sortie) et de la sortie. Pour observer les grandeurs de sortie, on utilise des capteurs. C’est l’information de ces capteurs qui va permettre d’elaborer la commande.

Fig. 1.1 – Schema d’un systeme en Boucle Ouverte (en haut) et en Boucle Fermee (en bas)
Ce que nous avons vu permet de donner cette autre definition de l’automatique. Automatique: c’est une science et une technique qui permet de maitriser le comportement d’un systeme (traduit par ses grandeurs de sortie), en agissant de maniere adequate sur ses grandeurs d’entree.
1.3 Exemples
1.3.1 Chauffage d’une salle
Considerons le chauffage electrique d’une salle. Le syst`eme est constitue par l’ensemble chauffage + salle. La sortie de ce systeme est la temperature de la piece. La commande du systeme est la position 0 ou 1 de l’interrupteur. Les perturbations peuvent etre l’ouverture d’une fenetre, de la porte ou les rayons du soleil. En boucle ouverte, la commande est insensible a la sortie. Pour creer un feedback ou contre-reaction, on peut utiliser un thermostat. La commande est alors elaboree en fonction de la consigne (temperature souhaitee) et de la sortie (temperature de la piece).
1.4 Necessite de la boucle fermee

Fig. 1.2 – Schema de la regulation de la temperature d’une piece par un thermostat
Exceptionnellement, le syseme de commande peut operer en boucle ouverte a partir du seul signal de consigne. Mais la boucle fermee (contre reaction) est capable de
– stabiliser un systeme instable en BO
– compenser les perturbations externes
– compenser les incertitudes internes au processus lui-meme
Un systeme de commande peut realiser deux fonctions distinctes:
– l’asservissement c’est a dire la poursuite par la sortie d’une consigne variable dans le temps;
– la regulation c’est a dire la compensation de l’effet de perturbations variables sur la sortie (la consigne restant fixe)
1.3 Theorie des systemes et theorie de la commande
1.3.1 Notion de systeme
Un systeme, agregation d’elements interconnectes, est constitue naturellement ou artificiellement a?n d’accomplir une tache predefinie. Son etat est affecte par une ou plusieurs variables, les entrees du systeme. Le resultat de l’action des entrees est la reponse du systeme qui peut etre caracterisee par le comportement d’une ou plusieurs variables de sorties. Le systeme complet ou un des elements le composant est generalement represente schematiquement par un schema fonctionnel consistant en un rectangle auquel les signaux d’entree representes par des fleches entrantes sont appliques. L’action des entrees produit de maniere causale des effets mesures par les signaux de sortie representes par des fleches sortantes. Notons ainsi que la notion de systeme est indissociable de celle de signal.
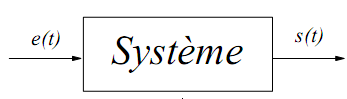
Fig. 1.24 – Schema fonctionnel
Les entrees affectant un systeme peuvent etre de nature differente. Les unes ont pour but d’exercer des actions entrainant le fonctionnement souhaite du systeme; ce sont les commandes. Les autres entrees troublent le fonctionnement desire et sont definies comme des perturbations.
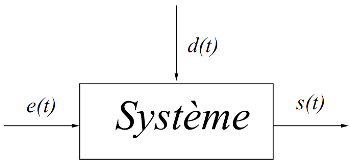
Fig. 1.25 – Commandes e(t) et perturbations d(t)
Chaque element constitutif de l’ensemble systeme peut etre caracterise par un nombre fini de variables et l’interdependance des variables caracterisant chaque element peut etre exprimee sous la forme d’une loi mathematique. Ainsi la relation entre les entrees et les sorties du systeme est l’expression des lois de la physique associees au systeme, c’est a dire la combinaison des lois mathematiques preсedentes. L’ensemble des lois mathematiques regissant la causalite entre les entrees et les sorties du systeme constitue le modele mathematique du systeme. La modelisation, etape preliminaire de l’analyse d’un systeme quelconque, independamment de sa nature physique, de sa composition et de son degre de complexite comporte donc les etapes suivantes:
– identifcation des variables pertinentes pour la сaracterisation de chaque element constituant le systeme,
– caracterisation des relations entre ces variables,
– representation mathematique des interactions entre les elements a travers la representation mathematique des interactions entre les variables,
– formation d’un systeme de relations entre les variables caracterisant le systeme comme un tout,
– formation d’un systeme de relations entre les variables d’entree et les variables de sortie.
Il est important de remarquer que tous ces aspects de l’analyse des systemes ainsi que ceux developpes par la suite sont abordes en theorie des systemes d’un point de vue abstrait plutot que d’un point de vue physique. Cela signifie qu’en theorie des systemes, l’identite physique des variables associees a un systeme importe moins que les relations mathematiques entre ces memes variables.