
Компьютерные системы и сети
Цифровая обработка сигналов (ЦОС) дает по истине безграничные возможности в областях обработки различного рода сигналов. Она появилась в 1960-1970–е годы, во времена, когда впервые стали доступны цифровые компьютеры. Но из-за высокой стоимости компьютеров, применение ЦОС ограничивалось лишь несколькими критическими задачами и жизненно важными сферами. В число первых попыток применение ЦОС, наряду с радиолокацией, гидролокацией (важных составляющих государственной безопасности), поиском нефтяных месторождений (данная сфера сулила большие доходы), исследованиях космического пространства, входила и рентгенография (как область которая спасала человеческие жизни).
После успеха применения ЦОС в рентгенографии и революцией в сфере компьютеров в 1980-1990-х годах, данный аппарат начал свое дальнейшее успешное применение в медицине. Сейчас ЦОС в медицине успешно совершила революцию в таких направления как:
Можно также отметить, что само понятие обработка сигналов
впервые встречается именно в медицине,
в связи с математическим анализом кардиограмм, начатым Эйнтховеном в 1903-ем году [2].
Позже в 1906 году он впервые применил телемедицинскую технологию – передал ЭКГ на расстояние.
В 1924 году Виллем Эйнтховен был удостоен Нобелевской премии За открытие механизма электрокардиограммы
.
В настоящее время в связи с развитием электроники и микропроцессорной техники появляются портативные медицинские диагностические приборы, которые с успехом могут использоваться в бытовых условиях. Одной из важнейших задач современной медицины является выявление на разной стадии и профилактика сердечных заболеваний.
Электрокардиография (ЭКГ) является одним из ведущих методов инструментального исследования сердечно-сосудистой системы, которая остается наиболее распространенным и доступным для широкого круга людей. Для постоянного контроля сердечно-сосудистой системы и получения своевременной помощи возможно применения дистанционного метода наблюдения пациента лечащим врачом.
Доступность проведения регулярного мониторинга работы сердца позволит выявлять такие заболевания на ранних стадиях болезней сердца, способствовать своевременному назначению лекарственных препаратов и уменьшить затраты на лечение. Цифровая обработка сигнала может существенно уменьшить стоимость необходимого оборудования, увеличить надежность и точность регистрационного оборудования. Данное направление переноса обработки сигнала электрокардиограммы с аналоговой части в цифровую является особенно актуальным. Это связано с ростом количества сердечных заболеваний.
В процессе работы по данной теме планируется исследовать различные способы фильтрации электрокардиосигнала, и разработать наиболее оптимальный алгоритм для реализации в портативных устройствах. Вот список задач которые планируется решить:
Для достижения данных задач был разработан план результатом выполнения которого будет магистерская работа. Данный план включает следующие пункты:
Практическое значение данной работы будет заключатся в алгоритмах обработки зашумленного сигнала, которые могут быть реализованы в портативных устройствах и анализе требований к ним.
Как известно, электрокардиография — это методика регистрации и исследования электрических полей, образующихся при работе сердца[3].
На сигналы ЭКГ могут накладываться различного рода шумы и помехи. Основные источники шумов и помех это:
Стандартный клинический аппарат ЭКГ работает с полосой частот 0,05 – 100 Гц [4]. Данный частотный отрезок будет выделятся из исходного и в нем будет производится удаление нежелательных частот.
Существует два основных метода для устранения нежелательных частот из сигнала. Во первых можно осуществить БПФ над входными отсчетами. И в результирующем массиве частот обнулить не желаемые для нас частоты, которые являются следствием влияния помех. Обнуление данных коэффициентов будет довольно тривиальной задачей, главной проблемой становится само БПФ из-за возможной громоздкости его реализации в портативном устройстве.
Вторым возможным вариантом является применение цифровых фильтров. Они представляют собой линейную дискретную систему, выполняющую преобразование входной последовательности в выходную по алгоритму, описываемому разностным уравнением. Они позволяют восстановить сигнал, который был каким-либо образом искажен. Решение данной задачи можно осуществить с помощью аналоговых фильтров, но цифровые фильтры позволяют достичь значительно более высокой точности.
Существует четыре основных вида цифровых фильтров: низкочастотный (а), полосовой (б), высокочастотный (в), режекторный (г) рис. 1.

Самым простым способом реализации цифрового фильтра есть свертка входного сигнала с импульсной характеристикой. По данному способу можно построить практически любой линейный фильтр. Фильтры, основанные на операции свертки, называются – не рекурсивными. В них каждый отсчёт выходного сигнала получается в результате умножения отсчётов входного сигнала на соответствующие весовые коэффициенты и последующему суммированию полученных результатов. Не рекурсивные фильтры, основанные на операции свёртки, называют фильтрами с конечной импульсной характеристикой (КИХ-фильтрами). Их описывает следующая передаточная функция [5]:
 (1)
(1)
Другой формой построения цифровых фильтров являются – рекурсивные фильтры. Этот класс является более широким. Кроме отсчётов входного сигнала, учитываются также отсчёты выходного сигнала, полученные на предыдущих итерациях. Рекурсивные фильтры называют фильтрами с бесконечной импульсной характеристикой (БИХ - фильтрами). Передаточная функция в общем виде имеет следующий вид:
 (2)
(2)
Ей соответствует алгоритм вычисления реакции в виде разности уравнений:
 (3)
(3)
Также помимо общего вида (2), передаточная функция БИХ может быть представлена в других эквивалентных видах [6], среди которых интерес представляют следующие два:
 (4)
(4)
 (5)
(5)
Передаточной функции КИХ-фильтров (1) соответствует разностное уравнение:
 (6)
(6)
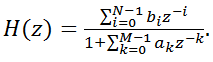
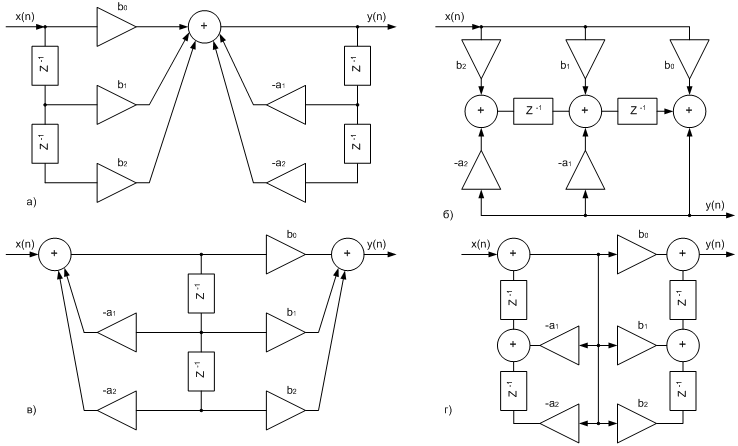
Таким образом, структура цифрового фильтра, отображающая алгоритм вычисления реакции, определяется видом передаточной функции. Основные виды передаточных функций БИХ-фильтров:
Они соответственно определяют три основные структуры БИХ-фильтров (рис. 2):
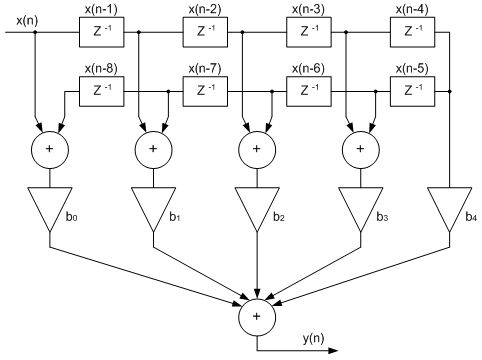
Передаточная функция (1), определяет прямую структуру КИХ-фильтра. Она представляется в основном двумя разновидностями:
Структура КИХ-фильтра с симметричной импульсной характеристикой изображена на рис. 3.
Цифровые фильтры можно классифицировать по области применения и их структуре табл. 1. По области применения всех их разделяют на три большие группы: фильтры временной обработки, фильтры частотной обработки и специальные фильтры. Так как полученная информация во входном сигнале будет представлена в временной области, то данная группа фильтров имеет наибольший интерес. По внутренней структуре цифровые фильтры разделяются на вышеупомянутые КИХ и БИХ.
Таблица 1 - Классификация фильтров
| По области применения |
|
|
| На основе свёртки (КИХ) | С рекурсивной структурой | |
| Фильтры временной области | Однородные фильтры | Однополюсные рекурсивные фильтры |
| Фильтры частотной области | Оконные фильтры | Фильтры Чебышева |
| Специальные фильтры | Специальные КИХ-фильтры | Фильтры с итеративной структурой |
Как видно из табл. 1 КИХ-фильтры и БИХ-фильтры составляют собой два класса фильтров. На вопрос на основе какого из классов реализовать необходимые алгоритмы и будет отвечать моя магистерская работа.
На данном этапе работы была разработана схема устройство снятия электрокардиограммы для дальнейшей обработки в системе MATLAB.
Схема изображена на рис. 4.

Также ниже (рис. 5) можно видеть исходный и отфильтрованный сигнал посредством поочередной фильтрации полосовыми режекторным фильтром.
При написании данного реферата магистерская работа еще не завершена. Окончательное завершение: декабрь 2012. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты.
Компоненты и технологии- 2008 - ноябрь - 146 с.
Компоненты и технологии- 2009 - январь - 108 с.