
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Актуальность темы
- 2. Цель и задачи исследования, планируемые результаты
- 3. Обзор исследований и разработок
- 3.1 Обзор источников по теме
- 3.2 Текущие результаты
- Выводы
- Список источников
Введение
Современный технический
уровень
машин и механизмов, широкое внедрение систем автоматического управления
и
средств вычислительной техники изменили расстановку приоритетов при
анализе
факторов, влияющих на эффективность производственных процессов. Одним
из
наиболее весомых становится фактор повышения эффективности работ по
техническому обслуживанию и ремонту (работ по ТОР), поскольку
качественное
техническое обслуживание, выполняемое специальной службой ТОР,
позволяет
снизить простои оборудования по причине отказа.
По определению система
технического обслуживания и ремонта даже при реализации простейших
стратегий
обслуживания и ремонта может рассматриваться как система управления
техническим
состоянием. Такое представление системы ТОР тем более обосновано при
применении
современных стратегий, предполагающих использование при планировании
работ по обслуживанию
и ремонту технических средств диагностирования.
1. Актуальность темы
Большинство работ
посвящённых
анализу и синтезу систем ТОР основное внимание уделяют надёжностным
характеристикам (вероятность безотказной работы, интенсивность отказов,
вероятности ошибок персонала и т.д.). Даже при анализе систем ТОР с
точки
зрения учёта обученности и профессиональной подготовки персонала
определяющими
всё равно остаются указанные выше характеристики.
Все процессы, протекающие в системе ТОР, как в замкнутой СУТС, характеризуются определёнными статическими и динамическими свойствами, которые в терминах теории автоматического управления отображают динамику процесса восстановления, обученности и динамические свойства персонала, как человека-оператора, достоверность и оперативность ТСД.
Учёт этих факторов и, в частности, профессиональных характеристик ремонтного персонала, позволит более обосновано планировать работы по ТОР (в рамках принятой стратегии) и тем самым повысить эффективность системы.
2. Цель и задачи исследования, планируемые результаты
Целью работы является
повышение
эффективности системы управления техническим состоянием сложных
объектов за
счёт учёта профессиональных характеристик ремонтного персонала в виде
динамических параметров управляющих устройств.
Для достижения поставленной
цели
необходимо решить следующие адачи:
- представить
систему
технического обслуживания и ремонта в виде системы управления
техническим
состоянием;
- исследовать
динамику
объекта управления при потере-восстановлении работоспособности;
- провести анализ
работы
ремонтного персонала как управляющего устройства;
- исследовать
динамику
системы управления техническим состоянием.
Объект.
Система управления техническим состоянием.
Предмет. Динамика
процессов потери и восстановления работоспособности.
Апробация результатов работы. Материалы работы
докладывались на III международной
научно-практической
конференции молодых ученых «Современная информационная
Украина: информатика,
экономика, философия».
3. Обзор исследований и разработок
Поскольку системы технического обслуживания и ремонта являются важной частью производственных процессов, то проблемы по востановления работоспособности, устранению отказа и реализации комплекса мероприятий, направленных на поддержание в конкретных условиях эксплуатации показателей качества (в частности, показателей надежности) оборудования на уровне, предусмотренном в нормативной документации, были широко исследованы как американскими, европейскими, я так и отечественными специалистами.
В работах Яговкина А. И. рассматриваются такие проблемы как увеличение срока службы агрегатов до замены деталей в реальных условиях эксплуатации, практические приемы оценки изменения технического состояния агрегатов и советы по высококачественному ремонту агрегатов с минимальными затратами и простоем машин в ремонте.
При организации технического обслуживания и ремонта оборудования энергохозяйств промышленных предприятий энергетические службы начиная с 1976 г. пользовались «Системой планово-предупредительного ремонта электрооборудования промышленных предприятий».
Система ТОР ЭО не только отвечает современным понятиям теории, науки и практики ремонта и восстановления производственных основных фондов, техники и оборудования промышленных предприятий, но и дает конкретные рекомендации, нормы и нормативы по организации и проведению прежде всего технического обслуживания как наиболее эффективного и экономного ремонтного воздействия. Это позволило пересмотреть и изменить продолжительность и структуру ремонтных циклов оборудования энергохозяйств в сторону ужесточения, т. е. продолжительность ремонтного цикла увеличить, а число ремонтов сократить. Из структуры ремонтного цикла в ряде случаев исключается капитальный ремонт, для некоторых видов оборудования капитальный ремонт заменяется на средний ремонт. Для других видов оборудования энергохозяйств оговаривается, что применение капитального ремонта требует технико-экономического обоснования, Изменения в продолжительности и структуре ремонтного цикла произведены так, что они не противоречат соответствующим рекомендациям, нормам и правилам технической эксплуатации и техники безопасности.
В представленных нормах и рекомендациях авторы стремились к максимальному учету различных положений, инструкций и правил государственных органов надзора и инспекций в части согласования сроков ремонта, структуры и продолжительности циклов технического обслуживания и ремонта, объема ремонтных работ, согласования видов контрольно-испытательных работ, тех или иных видов ремонта, сроков проверки и сроков ремонта.
3.1 Обзор источников по теме
Проведя анализ мировых и отечественных литературных источников связанных с техническим обслуживанием и диагностикой сложных технических объектов необходимо отметить, что в первую очередь необходимо определиться с формой технического обслуживания техники, применяемыми методами неразрушающего контроля и технической диагностики, а также программными и техническими средствами, на базе которых строятся методы и методики для достоверной диагностики объектов. Особенного внимания заслуживают внимания труды идеологов BALTECH, которые систематизируют подходы к диагностике, обслуживанию и эксплуатации технических сложных объектов. К сожалению в большинстве научной литературе надежность рассматривается на более низких уровнях всей многомерной системы технических объектов начиная с методов технической диагностики, которые в отдельности не приносят желаемого результата даже при разработке новых прогрессивных методик. Как в медицинской, так и в технической диагностике на первом месте по мнению автора должны стоять превентивные меры. Образно говоря: «Сколько мы не диагностируем человека (объект), состояние его не улучшится».
Рассмотрение системы ТОР как СУТС
определяет необходимость выяснения основной задачи технического
обслуживания и
ремонта сложных объектов.
1.1 Понятие сложного объекта
Под сложным объектом понимается объект, который характеризуется следующими особенностями [1, 2]:
- целостность выполнения единой поставленной перед объектом задачи с определенной эффективностью;
- многомерность;
- различные физическая природа, динамические свойства и степень надежности отдельных функционально-конструктивных элементов, составляющих объект;
- наличие в объекте всевозможных перекрещивающихся прямых и обратных связей, которые приводят к тому, что ни один его элемент не функционирует самостоятельно;
- статистическая природа управляющих сигналов, внешних возмущений и нагрузок;
- наличие конкурирующих сторон (например, сигналов управления, с одной стороны, и организованных и неорганизованных помех, с другой стороны).
В наибольшей степени указанные особенности проявляются в механизмах, машинах и агрегатах, оснащенных системами и средствами автоматического управления (регулирования), реализующих множество функциональных поведений, технологически связанных с соответствующим вспомогательным оборудованием и работающих в различных режимах при достаточно мощных внешних возмущениях.
Техническим обслуживанием и ремонтом сложных объектов занимаются специализированные службы, представляющие собой системы технического обслуживания и ремонта (системы ТОР).
Система технического обслуживания и ремонта оборудования представляет собой комплекс взаимосвязанных положений и норм, определяющих организацию и порядок проведения работ по техническому обслуживанию и ремонту оборудования для заданных условий эксплуатации с целью обеспечения показателей качества, предусмотренных в нормативной документации [3].
3.2 Текущие результаты
В настоящее время применяются две системы технической эксплуатации зданий и сооружений как совокупность взаимосвязанных организационных и технических мероприятии по установлению технического состояния оборудования, проведению профилактических мер и ремонтов конструкций и оборудования, осуществляемых в строго установленные сроки, для обеспечения сохранности и эксплуатационной пригодности, предупреждения преждевременного износа и предотвращения аварийных ситуации.

Рисунок 1 - Эксплуатация оборудования
(Анимация: объем - 294 КБ; размер - 653х322; количество кадров - 4; задержка между кадрами - 250 мс; задержка между последним и первым кадрами - 250 мс; количество циклов повторения - 5)
Рассматривая
оборудование как
динамическую систему (динамический объект управления), в работах [2, 3,
4]
указывается, что при отказах переход объекта из одного технического
состояния в
другое сопровождается переходным процессом, длительность которого
зависит от
вида нарушения и динамических свойств объекта. Динамический характер
носит и
процесс восстановления работоспособности [5]. Таким образом,
рассматривая
процесс восстановления работоспособности как процесс стабилизации,
можно
утверждать, что переходные процессы потери и восстановления
работоспособности
при единичном отказе в самом общем случае будут иметь вид, показанный
на
рисунке 1, где g(t)
– параметр
технического состояния.
Очевидно,
что характер и показатели
качества переходных процессов потери и восстановления работоспособности
будут
определяться структурой и динамическими свойствами объекта и
управляющего
устройства (устройства стабилизации). Поэтому вполне правомерна
постановка
задачи исследования динамики системы управления техническим состоянием
оборудования с помощью методов, принятых в теории управления
динамическими объектами.

Рисунок 1 – Графики переходных процессов потери и восстановления
работоспособности при внезапном (а) и постепенном (б) отказах
2
Структура объекта
исследования
- наблюдение за исходным состоянием или поведением объекта;
- формирование и реализация целенаправленного воздействия на объект;
- наблюдение за результатами управления.
Понятно, что в каждом конкретном случае эти фазы будут характеризоваться особенностями, присущими той или иной системе управления. Указанные особенности отразятся в количественном и качественном составе контролируемых переменных, в алгоритмах обработки информации и формирования управляющих воздействий и т.п., то есть предопределят функциональную организацию системы [6]. В свою очередь, функциональная организация отразится на составе элементов системы и их распределении во времени и пространстве, то есть обусловит формирование структуры системы [7].
Для анализа первой фазы процесса управления, рассматриваемого в данной работе, разобьем все пространство возможных технических состояний объекта Q на следующие четыре области: Q1 – объект работоспособен; Q2 – объект неработоспособен; Q3 – объект функционирует правильно; Q4 – объект функционирует неправильно. Кроме того, для многофункциональных объектов диагностирования в работе [8] рекомендуется вводить еще одну область: Q5 – объект не функционирует. При этом полагается, что в техническом состоянии Q4 объект не выполняет какую-либо одну из своих функций, а в техническом состоянии Q5 объект не выполняет ни одну из своих функций.
С учетом принятых понятий «Работоспособность (неработоспособность)» и «Правильное (неправильное) функционирование» [9] остальные соотношения можно представить в виде следующих высказываний: I1: «Объект работоспособен и правильно функционирует»; I2: «Объект неработоспособен, но функционирует правильно»; I3: «Объект функционирует неправильно»; I4: «Объект не функционирует».
Определим, каким образом указанные высказывания могут быть сделаны человеком. Для этого в качестве примера рассмотрим контроль технического состояния электродвигателя. Наблюдая за его работой, человек формирует результаты своих наблюдений примерно так [10]: «Двигатель не идет в ход», «При номинальной нагрузке двигатель вращается с частотой, не достигающей номинальной», «Двигатель сильно гудит и развивает пониженный крутящий момент», «Наблюдается общий равномерный перегрев обмотки статора», «Повышенная вибрация двигателя» и т.п.
Анализируя приведенные примеры, обратим внимание на следующее. Во-первых, все высказывания человека сформулированы относительно объективных или субъективных показателей g(t) Î G, характеризующих эффективность использования объекта по назначению (показателей эффективности [11]). Во-вторых, для всех показателей эффективности также объективно или субъективно установлены области допустимых изменений. Выход любого из показателей за границы области «своих» допустимых значений воспринимается субъектом как факт перехода объекта из одного технического состояния в другое. В-третьих, оценка показателей эффективности осуществляется с учетом управляющих и возмущающих воздействий.
Множество значений показателей эффективности G разделим на два подмножества G1 и G2, причем G2 Ì G1. Если g(t) Ï G1, то имеет место отказ объекта, который должен быть устранен в результате реализации режима «Устранение отказа». Если же g(t) Î G1, но при этом g(t) Ï G2, то данное соотношение характеризует такую степень развития первичного дефекта, при котором высока вероятность отказа, и тем самым обусловливает необходимость реализации режима «Профилактика».
Сопоставив сказанное со структурой СУТС, можно сделать вывод, что в рассматриваемой системе имеются два наблюдателя за техническим состоянием оборудования:
- «Наблюдатель 1» – эксплуатационный персонал, осуществляющий технологическое управление оборудованием, контролирующий его техническое состояние в различных режимах работы и тем самым фиксирующий факт отказа (то есть фиксирующий ситуацию, когда g(t) Ï G1) и сигнализирующий о необходимости реализации режима «Устранение отказа»;
- «Наблюдатель 2» – руководящий персонал (руководство) службы ТОР, непосредственно или опосредованно контролирующий характер изменения технического состояния оборудования (то есть наблюдающий за ситуацией, когда g(t) Î G2) и формирующий план реализации режима «Профилактика», целью которого является предотвращение ситуации, когда g(t) Ï G2, а тем более ситуации, когда g(t) Ï G1.
Таким
образом, первую фазу
процесса
управления техническим состоянием можно представить в виде
соответствующей
системы контроля, структурная схема которой приведена на рисунке 2.
 |
|
Рисунок 2 – Структурная схема системы контроля |
На рисунке 2 обозначено: x(t) – «технологическое» управление; f(t) – возмущающее воздействие, вызывающее изменения технического состояния объекта; h1 – сигнал, активирующий режим «Устранение отказа»; h2(Iпр) – сигнал, активирующий режим «Профилактика» и содержащий информацию об элементах объекта, подлежащих наладке, замене или ремонту (Iпр).
Рассмотрим теперь систему управления техническим состоянием, оснащенную встроенными автоматическими или переносными автоматизированными техническими средствами диагностирования (ТСД). Положим, что в применяемых технических средствах диагностирования обеспечена однозначность отображения множества дефектов D во множество диагностических признаков b(t) Î Б. Кроме того, в множестве диагностических признаков Б также выделены два подмножества Б1 и Б2, аналогичные (по смыслу) подмножествам G1 и G2. Если b(t) Ï Б1, то реализуется режим «Устранение отказа», если же b(t) Î Б1, но при этом b(t) Ï Б2, то реализуется режим «Профилактика».
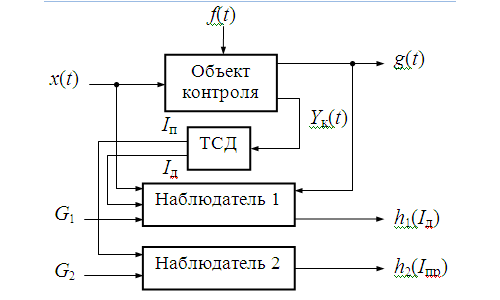
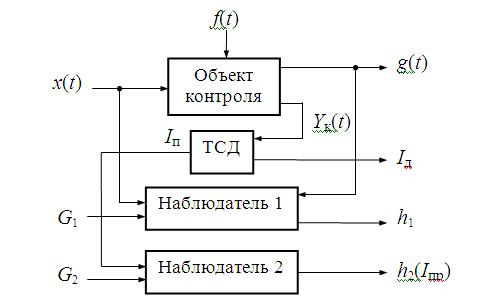
С учетом сказанного структурная схема системы контроля технического состояния с применением встроенных автоматических ТСД примет вид, показанный на рисунке 3, а с применением переносных автоматизированных ТСД – на рисунке 4, где Yк(t) – множество контролируемых переменных объекта, необходимых для формирования диагностических признаков; Iд – информация о причине отказа (индикация дефекта); Iп – информация, используемая руководством службы ТОР при планировании работ в режиме «Профилактика».
|
Рисунок
3 – Структурная схема системы контроля со встроенными ТСД
|
 |
|
Рисунок 4 – Структурная схема системы контроля с переносными ТСД |
Рассмотрим вторую фазу процесса управления – формирование и реализация целенаправленного воздействия на объект. При этом учтем следующее:
1) под целенаправленным воздействием (непосредственно управлением) будем понимать восстановление работоспособности, то есть перевод объекта из начального (неработоспособного или близкого к неработоспособному) состояния в конечное (работоспособное) состояние;
2) восстановление работоспособности (непосредственно управление) осуществляется ремонтным персоналом, что позволяет рассматривать его как управляющее устройство (устройство стабилизации, регулятор);
3) поскольку предметом исследования является непосредственно процесс восстановления, то будем полагать, что на момент начала работы ремонтный персонал имеет информацию о том, работоспособность какого элемента объекта должна быть восстановлена.
Следовательно, структурная схема объекта исследования имеет вид, показанный на рисунке 5, где s(t) – выходная переменная, содержащая информацию о техническом состоянии восстанавливаемого объекта (или его функционально-конструктивного элемента); u(t) – управляющее воздействие.
 |
|
Рисунок 5 – Структурная схема объекта исследования |
Таким образом, задачу восстановления работоспособности (как задачу стабилизации технического состояния объекта) можно сформулировать так: необходимо с помощью управляющего воздействия u(t) с точностью не ниже заданной (требуемой) e устранить отклонение технического состояния объекта s(t), обусловленного воздействием возмущения f(t), от значения, предусмотренного в нормативно-технической документации.
Отметим, что третья фаза управления выполняется в процессе реализации второй фазы путем наблюдения за переменной s(t).
2 Определение структуры и параметров управляющего устройства
В работах [15, 16] указывается, что характеристики ремонтного персонала оказывают наиболее существенное влияние на эффективность системы ТОР. Наибольшее внимание данному вопросу уделено в работе [15], где для оценки качества работы ремонтного персонала используются такие характеристики, как надежность и операторская напряженность [17-20]. Такой же подход принят и в работе [21], в которой приведен способ оценки эффективности алгоритмов диагностирования. Не отрицая важности указанных характеристик, отметим, что в данной работе система ТОР рассматривается как замкнутая динамическая система управления. Следовательно, основными, как общепринятыми в теории управления динамическими объектами, необходимо считать такие показатели системы как устойчивость, точность, вид переходного процесса и его показатели качества, которые при известном объекте формируются выбором динамических свойств управляющего устройства. В этом смысле наиболее подходящими являются математические модели человека как динамического звена системы управления [20, 22, 23].
С точки зрения динамики управления наиболее близкой моделью сенсомоторной деятельности человека является дискретная модель. На рисунке 22 показана обобщенная структурная схема эргатической системы управления (ЭСУ), на которой обозначено: 1 – индикаторное устройство; 2 – импульсный элемент; 3 – формирующая цепь (экстраполятор); 4 – непрерывное линейное звено.
|
|
|
Рисунок 22 – Структурная схема эргатической системы управления |
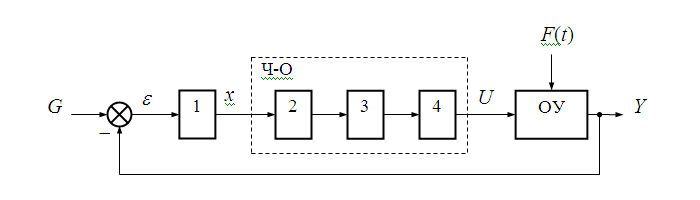
Как следует из данной структурной схемы, человек-оператор представляется в виде последовательного соединения импульсного элемента, экстраполятора и непрерывного линейного звена.
Наличие импульсного элемента в виде периодически замыкающегося и размыкающегося ключа с экстраполятором приводит к дискретизации входного сигнала и представлению его в виде некоторой ступенчатой функции. Тем самым косвенным образом может моделироваться ряд следующих специфических особенностей деятельности человека-оператора.
Во-первых, моделируется нечувствительность оператора к малым изменениям входного сигнала, так как эти изменения не имеют каких-либо последствий на выходе до очередного замыкания ключа.
Во-вторых, моделируется способность оператора при управлении объектом высокого порядка совершать быстрые пробные движения и затем удерживать орган управления в фиксированном положении, ожидая реакции объекта на эти движения.
В-третьих, наличие прерывателя ограничивает частоты, которые могут быть воспроизведены на выходе, величиной не более половина частоты прерывания и тем самым явным образом отражает фильтрующие свойства оператора. Например, при частотах входного сигнала, превышающих 1,6 Гц, менее 30% спектральной плотности выходного сигнала человека-оператора оказывается линейно связанной со спектральной плотностью входного сигнала.
В-четвертых, шум квантования во времени в известной мере позволяет имитировать более широкий спектр гармоник выходного сигнала оператора при ограниченном спектре входного сигнала. Это явление обусловлено уже упомянутыми выше пробными движениями, а также стохастичностью движений человека, которые обусловлены такими факторами, как вид и направление движения, механические характеристики органа управления, эмоциональное и физическое состояние человека, вид входного сигнала и т.п.
Введение в модель экстраполятора позволяет учесть экспериментально наблюдаемые явления интерполяции и экстраполяции реакции человека-оператора при временном исчезновении входного сигнала. Кроме того, с помощью экстраполятора представляется возможным смоделировать прогнозирующие способности оператора, которые вырабатываются в процессе многократных повторений в ходе тренировок и опытов одного и того же закона изменения входного сигнала, что вызывает запоминание им если не всего закона, то его отдельных характерных участков. Вследствие этого в действиях оператора появляются упреждающие движения, зачастую им самим не осознаваемые. Отметим, что наиболее часто при моделировании деятельности человека-оператора используют экстраполяторы нулевого и первого порядка.
Выводы
Представление систем
технического
обслуживания и ремонта в виде системы управления техническим
состоянием, в
частности системы стабилизации выходной переменной объекта, позволяет
применить
для исследования системы ТОР методов теории автоматического управления.
Описание сложного объекта с помощью соответствующей структурной схемы позволяет рассматривать отказы отдельных элементов как параметрические возмущения.
Список источников
-
ГОСТ 18322-78. Система технического обслуживания и ремонта техники. Термины и определения. -
Скляревич А.Н. Линейные системы с возможными нарушениями. – М.: Наука, 1975. – 352 с. - Скляревич А.Н., Скляревич Ф.А. Линейные системы с возможными изменениями. – Рига: Зинатне, 1985. – 296 с.
- Склярвич А.Н., Скляревич Ф.К. Вероятностные модели объектов с возможными изменениями. – Рига: Зинатне, 1989. – 366 с.
- Байхельт Ф., Франкен П. Надежность и техническое обслуживание. Математический подход. – М.: Радио и связь, 1988. – 392 с.
- Сетров М.И. Основы функциональной теории организации. – М.: Наука, 1972. – 164 с.
-
Николаев В.И., Брук В.М. Системотехника: методы и приложения. – Л.: Машиностроение, 1985. – 199 с. - Воронин В.В. Множество возможных дефектов и виды технических состояний // Приборы и системы. Управление. Контроль. Диагностика. – 2002. – № 6. – С. 41-44.
- ГОСТ 27.002-83. Надежность в технике. Термины и определения.
-
Гемке Р.Г. Неисправности электрических машин. – М.: Энергоатомиздат, 1989. – 336 с. -
Надежность и эффективность в технике: Справочник в 10-ти кн. / Кн. 8: Эксплуатация и ремонт / Под ред. В.И. Кузнецова и Е.Ю. Барзиловича. – М.: Машиностроение, 1990. – 320 с. Солодовников В.В., Бирюков В.Ф., Тумаркин В.И. Принцип сложности в теории управления. – М.: Наука, 1977. – 344 с. Солодовников В.В., Тумаркин В.И. Теория сложности и проектирование систем управления. – М.: Наука, 1980. – 162 с. Федосов Е.А., Себряков Г.Г. Спектральный анализ систем управления со случайно изменяющимися параметрами // Автоматическое управление и вычислительная техника: Сб. статей, вып. 8. – М.: Машиностроение, 1968. – С. 208-238. Гимельшейн Л.Я. Техническое обслуживание и ремонт подземного оборудования. – М.: Недра, 1984. – 221 с. -
Маньшин Г.Г. Управление режимами профилактик сложных систем. – Минск: Наука и техника, 1976. – 255 с. -
Венда В.Ф. Инженерная психология и синтез систем отображения информации. – М.: Машиностроение, 1975. – 396 с. - Губинский А.И., Кобзев В.В. Оценка надежности деятельности человека-оператора в системах управления. – М.: Машиностроение, 1974. – 52 с.
- Суходольский Г.В. Структурно-алгоритмический анализ и синтез деятельности. – Л.: Изд-во ЛГУ, 1976. – 120 с.
Зараковский Г.М., Павлов В.В. Закономерности функционирования эргатических систем. – М.: Радио и связь, 1987. – 232 с. -
Цибулевский И.Е. Человек как звено следящей системы. – М.: Наука, 1981. – 288 с. - Ронжин О.В. Информационные методы исследования эргатических систем. – М.: Энергия, 1976. – 208 с.
- Фролов К.В. Уменьшение амплитуды колебаний резонансных систем путем управляемого изменения параметров // Машиноведение. – 1965. – № 3. – С. 25-30.
Александров А.Г. Оптимальные и адаптивные системы. – М.: Высшая школа, 1989. – 263 с. - Моделирование динамических систем [Электронный ресурс]. – Точка доступа: URL: http://www.ee.unb.ca/jtaylor/Publications/m2sabi.pdf
- Имитационное моделирование сложных динамических систем [Электронный ресурс]. – Точка доступа: URL: http://www.exponenta.ru/soft/others/mvs/ds_sim.asp
- Устойчивость движений дискретных динамических систем [Электронный ресурс]. – Точка доступа: URL: http://195.19.227.46:8080/innov15/reports/Alex_shtx.pdf
- Стабілізація динамічних систем імпульсним і гібридним керуванням [Электронный ресурс]. – Точка доступа: URL: http://www.lib.ua-ru.net/diss/cont/338512.html
- Динамическиее системы [Электронный ресурс]. – Точка доступа: URL: http://www.maikonline.com/maik/index.do
Примечание
При написании данного реферата магистерская работа еще не
завершена. Окончательное завершение - 1 декабря 2012 г. Полный текст
работы и материалы по теме могут быть получены у автора или его
руководителя после указанной даты.