
Реферат
за темою магістерської роботи
"Дослідження динаміки системи управління технічним станом устаткування"
Зміст
- Вступ
- 1. Актуальність теми
- 2. Мета і задачі дослідження та заплановані результати
- 3. Огляд досліджень та розробок
- 3.1 Огляд джерел по темі
- 3.2 Поточні результати
- Висновки
- Перелік посилань
Вступ
За визначенням система технічного обслуговування і ремонту навіть при реалізації найпростіших стратегій обслуговування і ремонту може розглядатися як система управління технічним станом. Таке уявлення системи ТОР тим більше обгрунтовано при застосуванні сучасних стратегій, що передбачають використання при плануванні робіт з обслуговування та ремонту технічних засобів діагностування.
1. Актуальність теми
Всі процеси, що протікають в системі ТОР, як у замкненій СУТС, характеризуються певними статичними і динамічними властивостями, які в термінах теорії автоматичного управління відображають динаміку процесу відновлення, навченості та динамічні властивості персоналу, як людини-оператора, достовірність та оперативність ТСД.
Облік цих факторів і, зокрема, професійних характеристик ремонтного персоналу, дозволить більш обгрунтовано планувати роботи по ТОР (в рамках прийнятої стратегії) і тим самим підвищити ефективність системи діагностування.
2. Мета і задачі дослідження та заплановані результати
Для досягнення поставленої мети необхідно вирішити наступні задачі:
- представити систему технічного обслуговування і ремонту у вигляді системи управління технічним станом;
- дослідити динаміку об'єкта управління при втраті-відновленні працездатності;
- провести аналіз роботи ремонтного персоналу як керуючого пристрою;
- дослідити динаміку системи управління технічним станом.
Об'єкт. Система управління технічним станом.
Предмет. Динаміка процесів втрати і відновлення працездатності.
Апробація результатів роботи. Матеріали роботи доповідалися на III міжнародній науково-практичній конференції молодих вчених «Сучасна інформаційна Україна: інформатика, економіка, філософія».
3. Огляд досліджень та розробок
Оскільки системи технічного
обслуговування і ремонту є важливою частиною виробничих процесів, тому
проблеми з відновлювання працездатності, усунення відмови і реалізації
комплексу заходів, спрямованих на підтримання в конкретних умовах
експлуатації показників якості (зокрема, показників надійності)
обладнання на рівні, передбаченому в нормативній документації, були
широко досліджені як американськими, європейськими, так і
вітчизняними фахівцями.
В роботах Яговкіна А. І. розглядаються
такі проблеми як збільшення терміну служби агрегатів до заміни деталей
в реальних умовах експлуатації, практичні прийоми оцінки зміни
технічного стану агрегатів та поради по високоякісному ремонту
агрегатів з мінімальними витратами і простоєм машин у ремонті.
При організації технічного обслуговування та ремонту
обладнання енергогосподарств промислових підприємств енергетичні служби
починаючи з 1976 р. користувалися "Системою
планово-попереджувального ремонту електрообладнання промислових
підприємств".
Система ТОР ЕО не тільки відповідає сучасним поняттям
теорії, науки і практики ремонту і відновлення виробничих основних
фондів, техніки і устаткування промислових підприємств, але і дає
конкретні рекомендації, норми і нормативи з організації та проведення
насамперед технічного обслуговування, як найбільш ефективного та
економного ремонтного впливу. Це дозволило переглянути і змінити
тривалість і структуру ремонтних циклів обладнання енергогосподарств в
бік посилення, тобто збільшити тривалість ремонтного циклу, а число
ремонтів скоротити. Зі структури ремонтного циклу в ряді випадків
виключається капітальний ремонт, для деяких видів обладнання
капітальний ремонт замінюється на середній ремонт. Для інших видів
обладнання енергогосподарств обмовляється, що застосування капітального
ремонту потребує техніко-економічного обгрунтування. Зміни в тривалості
та структурі ремонтного циклу зроблені так, що вони не суперечать
відповідним рекомендаціям, нормам і правилам технічної експлуатації і
техніки безпеки.
У представлених нормах та рекомендаціях автори прагнули до максимального обліку різних положень, інструкцій і правил державних органів нагляду та інспекцій в частині узгодження термінів ремонту, структури і тривалості циклів технічного обслуговування і ремонту, обсягу ремонтних робіт, погодження видів контрольно-випробувальних робіт, тих чи інших видів ремонту, термінів перевірки і термінів ремонту.
3.1 Огляд міжнародних джерел
Провівши аналіз світових і вітчизняних літературних джерел, пов'язаних з технічним обслуговуванням і діагностикою складних технічних об'єктів, необхідно зазначити, що в першу чергу необхідно визначитися з формою технічного обслуговування техніки, застосовуючи методи неруйнівного контролю та технічної діагностики, а також програмними і технічними засобами, на базі яких будуються методи і методики для достовірної діагностики об'єктів. Особливої уваги заслуговують уваги праці ідеологів BALTECH, які систематизують підходи до діагностики, обслуговування та експлуатації технічних складних об'єктів. На жаль, в більшості наукової літератури надійність розглядається на більш низьких рівнях всієї багатомірної системи технічних об'єктів починаючи з методів технічної діагностики, які окремо не приносять бажаного результату, навіть при розробці нових прогресивних методик. Як у медичній, так і в технічній діагностиці на першому місці на думку автора повинні стояти превентивні заходи. Образно кажучи: "Скільки ми не діагностуємо людину (об'єкт), стан його не покращиться".
Розгляд системи ТОР як СУТС визначає необхідність з'ясування основного завдання технічного обслуговування і ремонту складних об'єктів.
1.1 Поняття складного об'єкта
Під складним об'єктом розуміється об'єкт, який характеризується такими особливостями [1, 2]:
- цілісність виконання єдиної поставленої перед об'єктом задачі з
певною ефективністю;
- багатомірність;
-різні фізична природа, динамічні властивості і ступінь
надійності
окремих функціонально-конструктивних елементів, що складають об'єкт;
- наявність в об'єкті всіляких перехрещующихся
прямих і зворотніх
зв'язків, які призводять до того, що жоден його елемент не функціонує
самостійно;
- статистична природа керуючих сигналів, зовнішніх
збурень і
навантажень;
- наявність конкуруючих сторін (наприклад, сигналів
управління, з
одного боку, і організованих і неорганізованих перешкод, з іншого боку).
Найбільшою мірою зазначені особливості проявляються в механізмах, машинах і агрегатах, оснащених системами і засобами автоматичного керування (регулювання), що реалізують безліч функціональних поводжень, технологічно пов'язаних з відповідним допоміжним обладнанням і працюють в різних режимах при досить потужних зовнішніх збуреннях.
Технічним обслуговуванням і ремонтом складних об'єктів займаються спеціалізовані служби, що представляють собою системи технічного обслуговування і ремонту (системи ТОР).
Система технічного обслуговування та ремонту обладнання представляє собою комплекс взаємопов'язаних положень і норм, що визначають організацію і порядок проведення робіт з технічного обслуговування і ремонту обладнання для заданих умов експлуатації з метою забезпечення показників якості, передбачених у нормативній документації [3].
3.2 Поточні результати
В даний час застосовуються дві системи технічної експлуатації будівель і споруд як сукупність взаємопов'язаних організаційних і технічних заходів щодо встановлення технічного стану обладнання, проведення профілактичних заходів і ремонтів конструкцій та обладнання, здійснюваних в строго встановлені терміни, для забезпечення схоронності та експлуатаційної придатності, попередження передчасного зносу і запобігання аварійних ситуацій.
Розглядаючи обладнання як динамічну систему (динамічний об'єкт управління), в роботах [2, 3, 4] вказується, що при відмовах перехід об'єкта з одного технічного стану в інший супроводжується перехідним процесом, тривалість якого залежить від виду порушення і динамічних властивостей об'єкта. Динамічний характер носить і процес відновлення працездатності [5]. Таким чином, розглядаючи процес відновлення працездатності як процес стабілізації, можна стверджувати, що перехідні процеси втрати і відновлення працездатності при одиничній відмові в найзагальнішому випадку будуть мати вигляд, показаний на малюнку 1, де g (t) - параметр технічного стану.
Очевидно, що характер і показники якості перехідних процесів втрати і відновлення працездатності будуть визначатися структурою і динамічними властивостями об'єкта і керуючого пристрою (пристрою стабілізації). Тому цілком правомірна постановка задачі дослідження динаміки системи управління технічним станом обладнання за допомогою методів, прийнятих в теорії управління динамічними об'єктами.

Малюнок 1
- Графіки перехідних процесів втрати і відновлення
працездатності при раптовому (а) і
поступове (б) відмовах
У самому загальному випадку процес управління можна умовно розбити на наступні три фази:
- спостереження за вихідним станом або поведінкою об'єкта;
- формування та реалізація цілеспрямованого впливу на об'єкт;
- спостереження за результатами управління.
Зрозуміло, що в кожному конкретному випадку ці фази будуть характеризуватися особливостями, притаманними тій чи іншій системі управління. Зазначені особливості відіб'ються в кількісному і якісному складі контрольованих змінних, в алгоритмах обробки інформації та формування керуючих впливів і т.п., тобто зумовлять функціональну організацію системи [6]. У свою чергу, функціональна організація відіб'ється на складі елементів системи та їх розподілу у часі та просторі, тобто зумовить формування структури системи [7].
Для аналізу першої фази процесу управління, що розглядається в даній роботі, розіб'ємо весь простір можливих технічних станів об'єкта Q на наступні чотири області: Q1 - об'єкт працездатний; Q2 - об'єкт непрацездатний; Q3 - об'єкт функціонує правильно; Q4 - об'єкт функціонує неправильно. Крім того, для багатофункціональних об'єктів діагностування в роботі [8] рекомендується вводити ще одну область: Q5 - об'єкт не функціонує. При цьому вважається, що в технічному стані Q4 об'єкт не виконує яку-небудь одну зі своїх функцій, а в технічному стані Q5 об'єкт не виконує ні одну зі своїх функцій.
Співвідношення між зазначеними областями такі:
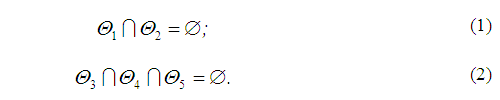
З урахуванням прийнятих понять «Працездатність (непрацездатність)» та «Правильне (неправильне) функціонування» [9] інші співвідношення можна представити у вигляді наступних висловлювань: I1: «Об'єкт працездатний і правильно функціонує»; I2: «Об'єкт непрацездатний, але функціонує правильно» ; I3: «Об'єкт функціонує неправильно»; I4: «Об'єкт не функціонує».
Визначимо, яким чином зазначені висловлювання можуть бути зроблені людиною. Для цього в якості прикладу розглянемо контроль технічного стану електродвигуна. Спостерігаючи за його роботою, людина формує результати своїх спостережень приблизно так [10]: «Двигун не йде в хід», «При номінальному навантаженні двигун обертається з частотою, не досягаючи номінальної», «Двигун сильно гуде і розвиває знижений крутний момент», «Спостерігається загальний рівномірний перегрів обмотки статора», «Підвищена вібрація двигуна» і т.п.
Аналізуючи наведені приклади, звернемо увагу на наступне. По-перше, всі висловлювання людини сформульовані щодо об'єктивних чи суб'єктивних показників g(t), Î, G, що характеризують ефективність використання об'єкта за призначенням (показників ефективності [11]). По-друге, для всіх показників ефективності також об'єктивно або суб'єктивно встановлені області допустимих змін. Вихід будь-якого з показників за межі області «своїх» допустимих значень сприймається суб'єктом як факт переходу об'єкта з одного технічного стану в інший. По-третє, оцінка показників ефективності здійснюється з урахуванням керуючих і збурюючих впливів.
Безліч значень показників ефективності G розділимо на дві підмножини G1 і G2, причому G2, Ì, G1. Якщо g(t), Ï, G1, то має місце відмова об'єкта, який повинен бути усунутий в результаті реалізації режиму «Виправлення відмови». Якщо ж g(t), Î ,G1, але при цьому g(t), Ï, G2, то співвідношення характеризує такий ступінь розвитку первинного дефекту, при якому висока ймовірність відмови, і тим самим обумовлює необхідність реалізації режиму «Профілактика».
Зіставивши сказане зі структурою СУТС, можна зробити висновок, що в даній системі є два спостерігача за технічним станом обладнання:
- «Спостерігач 1» - експлуатаційний персонал, який здійснює технологічне управління обладнанням, що контролює його технічний стан в різних режимах роботи і тим самим фіксує факт відмови (тобто фіксує ситуацію, коли g (t) Ï G1) і сигналізує про необхідність реалізації режиму «Виправлення відмови»;
- «Спостерігач 2» - керівний персонал (керівництво) служби ТОР, безпосередньо або опосередковано контролює характер зміни технічного стану обладнання (тобто спостерігає за ситуацією, коли g(t), Î, G2) і формуючий план реалізації режиму «Профілактика», метою якого є запобігання ситуації, коли g(t,) Ï, G2, а тим більше ситуації, коли g(t), Ï, G1.
Таким чином, першу фазу процесу управління технічним станом можна представити у вигляді відповідної системи контролю, структурна схема якої наведена на малюнку 2.

На малюнку 2 позначено: x(t) - «технологічне» управління; f(t) - виводить із рівноваги вплив, що викликає зміни технічного стану об'єкта; h1 - сигнал, що активує режим «Виправлення відмови»; h2 (Іпр) - сигнал, що активує режим «Профілактика» і містить інформацію про елементи об'єкта, що підлягають налагодженню, заміні або ремонту (Іпр).
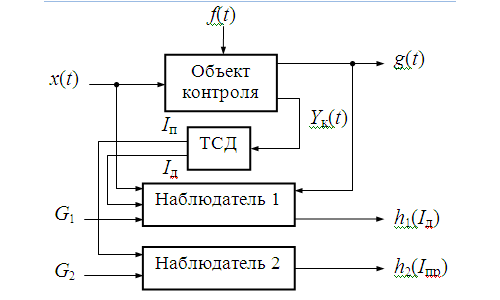
Розглянемо тепер систему управління технічним станом, оснащену вбудованими автоматичними або переносними автоматизованими технічними засобами діагностування (ТСД). Покладемо, що в застосовуваних технічних засобах діагностування забезпечена однозначність відображення безлічі дефектів D в безлічі діагностичних ознак b(t) Î Б. Крім того, в багатьох діагностичних ознаках Б також виділені дві підмножини Б1 і Б2, аналогічні (за змістом) підмножині G1 і G2 . Якщо b(t) Ï Б1, то реалізується режим «Виправлення відмови», якщо ж b(t) Î Б1, але при цьому b(t) Ï Б2, то реалізується режим «Профілактика».
З урахуванням сказаного структурна схема системи контролю технічного стану із застосуванням вбудованих автоматичних ТСД приймає вид, показаний на малюнку 3, а із застосуванням переносних автоматизованих ТСД - на малюнку 4, де Yк(t) - безліч контрольованих змінних об'єкта, необхідних для формування діагностичних ознак; Iд - інформація про причину відмови (індикація дефекту); Iп - інформація, яка використовується керівництвом служби ТОР при плануванні робіт в режимі «Профілактика».
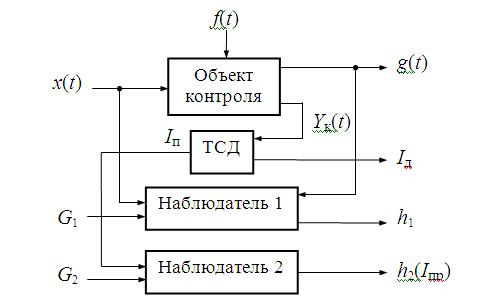
Малюнок 4 - Структурна схема системи контролю з переносними ТСД
Розглянемо другу фазу процесу управління - формування та реалізація
цілеспрямованого впливу на об'єкт. При цьому врахуємо наступне:
1) під цілеспрямованим впливом (безпосередньо управлінням) будемо
розуміти відновлення працездатності, тобто переклад об'єкта з
початкового (непрацездатного або близького до непрацездатного) стану в
кінцевий (працездатний) стан;
2) відновлення працездатності (безпосередньо управління) здійснюється
ремонтним персоналом, що дозволяє розглядати його як керуючий пристрій
(пристрій стабілізації, регулятор);
3) оскільки предметом дослідження є безпосередньо процес відновлення,
то будемо вважати, що на момент початку роботи ремонтний персонал має
інформацію про те, працездатність якого елементу об'єкта повинна бути
відновлена.
Отже, структурна схема об'єкта
дослідження має вид, показаний на малюнку 5, де s(t) - вихідна змінна,
яка містить інформацію про технічний стан відновлюваного об'єкта (або
його функціонально-конструктивного елементу); u(t) - керуючий вплив.

Малюнок 5 - Структурна схема об'єкта дослідження
Таким чином, завдання відновлення працездатності (як завдання
стабілізації технічного стану об'єкта) можна сформулювати так:
необхідно за допомогою керуючого впливу u(t) з точністю не нижче
заданої (потрібної), усунути відхилення технічного стану об'єкта s(t),
обумовленого впливом збурення f(t), від значення, передбаченого в
нормативно-технічній документації.
Зазначимо, що третя фаза управління
виконується в процесі реалізації другої фази шляхом спостереження за
змінною s(t).
2 Визначення
структури і параметрів керуючого пристрою
В роботах [15, 16] вказується, що характеристики
ремонтного персоналу надають найбільш істотний вплив на ефективність
системи ТОР. Найбільшу увагу даному питанню приділено в роботі [15], де
для оцінки якості роботи ремонтного персоналу використовуються такі
характеристики, як надійність і операторська напруженість [17-20].
Такий же підхід прийнятий і в роботі [21], в якій наведено спосіб
оцінки ефективності алгоритмів діагностування. Не заперечуючи
важливості зазначених характеристик, відзначимо, що в даній роботі
система ТОР розглядається як замкнена динамічна система управління.
Отже, основними, як загальноприйнятими в теорії управління динамічними
об'єктами, необхідно вважати такі показники системи як стійкість,
точність, вид перехідного процесу і його показники якості, які при
відомому об'єкті формуються вибором динамічних властивостей керуючого
пристрою. У цьому сенсі найбільш придатними є математичні моделі людини
як динамічної ланки системи управління [20, 22, 23].
З точки зору динаміки управління найбільш
близької моделлю сенсомоторної діяльності людини є дискретна модель. На
малюнку 6 показана узагальнена структурна схема ергатичної
системи
управління (ЕСУ), на якій позначено: 1 - індикаторний пристрій, 2 -
імпульсний елемент; 3 - формуючий ланцюг (екстраполятор); 4 -
безперервна
лінійна ланка.
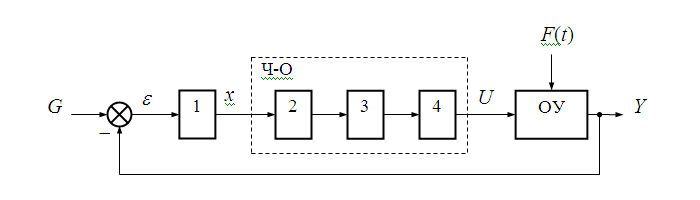
Малюнок 6 - Структурна схема ергатичної системи управління
Як випливає з даної структурної схеми, людина-оператор представляється у вигляді послідовного з'єднання імпульсного елемента, екстраполятора і безперервної лінійної ланки.
Наявність імпульсного елементу у вигляді періодично замикаючого і розмикаючого ключа з екстраполятором призводить до дискретизації вхідного сигналу і подання його у вигляді деякої ступінчастою функції. Тим самим непрямим чином може моделюватися ряд наступних специфічних особливостей діяльності людини-оператора.
По-перше, моделюється нечутливість оператора до малих змін вхідного сигналу, так як ці зміни не мають яких-небудь наслідків на виході до чергового замикання ключа.
По-друге, моделюється здатність оператора при управлінні об'єктом високого порядку здійснювати швидкі пробні рухи і потім утримувати орган управління у фіксованому положенні, чекаючи реакції об'єкта на ці рухи.
По-третє, наявність переривника обмежує частоти, які можуть бути відтворені на виході, величиною не більше половини частоти переривання і тим самим явно відображати фільтруючі властивості оператора. Наприклад, при частотах вхідного сигналу, що перевищують 1,6 Гц, менш 30% спектральної щільності вихідного сигналу людини-оператора виявляється лінійно пов'язаною зі спектральною щільністю вхідного сигналу.
По-четверте, шум квантування в часі у відомій мірі дозволяє імітувати більш широкий спектр гармонік вихідного сигналу оператора при обмеженому спектрі вхідного сигналу. Це явище обумовлене вже згаданими вище пробними рухами, а також стохастичністю рухів людини, які обумовлені такими факторами, як вид і напрямок руху, механічні характеристики органу управління, емоційний і фізичний стан людини, вид вхідного сигналу і т.п.
Введення в модель екстраполятора дозволяє
врахувати експериментально
спостережувані явища інтерполяції та екстраполяції реакції
людини-оператора при тимчасовому зникненні вхідного сигналу. Крім того,
за допомогою екстраполятора представляється можливим змоделювати
прогнози здатності оператора, які виробляються в процесі
багаторазових повторень в ході тренувань і дослідів одного і того ж
закону зміни вхідного сигналу, що викликає запам'ятовування їм якщо не
всього закону, то його окремих характерних ділянок. Внаслідок цього в
діях оператора з'являються попереджувальні руху, часто їм самим не
усвідомлювані. Відзначимо, що найбільш часто при моделюванні діяльності
людини-оператора використовують екстраполятор нульового чи першого
порядку.
Висновки
Подання систем технічного обслуговування та ремонту у вигляді системи управління технічним станом, зокрема системи стабілізації вихідної змінної об'єкта, дозволяє застосувати для дослідження системи ТОР методи теорії автоматичного управління.
Опис складного об'єкта за допомогою відповідної структурної схеми
дозволяє розглядати відмови окремих елементів як параметричні збурення.
Перелік посилань
-
ГОСТ 18322-78. Система технического обслуживания и ремонта техники. Термины и определения. -
Скляревич А.Н. Линейные системы с возможными нарушениями. – М.: Наука, 1975. – 352 с. - Скляревич А.Н., Скляревич Ф.А. Линейные системы с возможными изменениями. – Рига: Зинатне, 1985. – 296 с.
- Склярвич А.Н., Скляревич Ф.К. Вероятностные модели объектов с возможными изменениями. – Рига: Зинатне, 1989. – 366 с.
- Байхельт Ф., Франкен П. Надежность и техническое обслуживание. Математический подход. – М.: Радио и связь, 1988. – 392 с.
- Сетров М.И. Основы функциональной теории организации. – М.: Наука, 1972. – 164 с.
-
Николаев В.И., Брук В.М. Системотехника: методы и приложения. – Л.: Машиностроение, 1985. – 199 с. - Воронин В.В. Множество возможных дефектов и виды технических состояний // Приборы и системы. Управление. Контроль. Диагностика. – 2002. – № 6. – С. 41-44.
- ГОСТ 27.002-83. Надежность в технике. Термины и определения.
-
Гемке Р.Г. Неисправности электрических машин. – М.: Энергоатомиздат, 1989. – 336 с. -
Надежность и эффективность в технике: Справочник в 10-ти кн. / Кн. 8: Эксплуатация и ремонт / Под ред. В.И. Кузнецова и Е.Ю. Барзиловича. – М.: Машиностроение, 1990. – 320 с. Солодовников В.В., Бирюков В.Ф., Тумаркин В.И. Принцип сложности в теории управления. – М.: Наука, 1977. – 344 с. Солодовников В.В., Тумаркин В.И. Теория сложности и проектирование систем управления. – М.: Наука, 1980. – 162 с. Федосов Е.А., Себряков Г.Г. Спектральный анализ систем управления со случайно изменяющимися параметрами // Автоматическое управление и вычислительная техника: Сб. статей, вып. 8. – М.: Машиностроение, 1968. – С. 208-238. Гимельшейн Л.Я. Техническое обслуживание и ремонт подземного оборудования. – М.: Недра, 1984. – 221 с. -
Маньшин Г.Г. Управление режимами профилактик сложных систем. – Минск: Наука и техника, 1976. – 255 с. -
Венда В.Ф. Инженерная психология и синтез систем отображения информации. – М.: Машиностроение, 1975. – 396 с. - Губинский А.И., Кобзев В.В. Оценка надежности деятельности человека-оператора в системах управления. – М.: Машиностроение, 1974. – 52 с.
- Суходольский Г.В. Структурно-алгоритмический анализ и синтез деятельности. – Л.: Изд-во ЛГУ, 1976. – 120 с.
Зараковский Г.М., Павлов В.В. Закономерности функционирования эргатических систем. – М.: Радио и связь, 1987. – 232 с. -
Цибулевский И.Е. Человек как звено следящей системы. – М.: Наука, 1981. – 288 с. - Ронжин О.В. Информационные методы исследования эргатических систем. – М.: Энергия, 1976. – 208 с.
- Фролов К.В. Уменьшение амплитуды колебаний резонансных систем путем управляемого изменения параметров // Машиноведение. – 1965. – № 3. – С. 25-30.
Александров А.Г. Оптимальные и адаптивные системы. – М.: Высшая школа, 1989. – 263 с. - Моделирование динамических систем [Электронный ресурс]. – Точка доступа: URL: http://www.ee.unb.ca/jtaylor/Publications/m2sabi.pdf
- Имитационное моделирование сложных динамических систем [Электронный ресурс]. – Точка доступа: URL: http://www.exponenta.ru/soft/others/mvs/ds_sim.asp
- Устойчивость движений дискретных динамических систем [Электронный ресурс]. – Точка доступа: URL: http://195.19.227.46:8080/innov15/reports/Alex_shtx.pdf
- Стабілізація динамічних систем імпульсним і гібридним керуванням [Электронный ресурс]. – Точка доступа: URL: http://www.lib.ua-ru.net/diss/cont/338512.html
- Динамическиее системы [Электронный ресурс]. – Точка доступа: URL: http://www.maikonline.com/maik/index.do