
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Шаговый двигатель
- 1.1 Двигатели с переменным магнитным сопротивлением
- 1.2 Двигатели с постоянными магнитами
- 1.3 Гибридные двигатели
- 1.4 Классификация шаговых двигателей по способу питания
- 1.5 Способы управления шаговым двигателем
- 1.6 Управление питанием шагового двигателя
- 1.7 Пуск шагового двигателя. Явление резонанса
- 2. Двигатель постоянного тока
- 2.1 Тормозные режимы ДПТ
- 2.2 Система подчинённого регулирования угловой скорости
- 3. Понижающий реверсивный преобразователь постоянного тока в постоянный (H-мост)
- Выводы
- Список источников
Введение
В современном мире невозможно обойтись без электропривода. Жизнь бы серьёзно осложнилась не будь в доме лифта. Без электпропривода трудно себе представить системы охлаждения. Если переходить от общего к частному, то двигатели постоянного тока применяются в следующих устройствах и системах:
- Краны различных тяжёлых производств
- Привод, с требованиями регулировки скорости в широком диапазоне и высоким пусковым моментом
- Тяговый электропривод тепловозов, электровозов, теплоходов, карьерных самосвалов и пр.
- Стартёры автомобилей, тракторов и др.
Шаговые электродвигатели применяются в приводах машин и механизмов, работающих в старт-стопном режиме, или в приводах непрерывного движения, где управляющее воздействие задаётся последовательностью электрических импульсов, например, в станках с ЧПУ. В отличие от сервоприводов, шаговые приводы позволяют получать точное позиционирование без использования обратной связи от датчиков углового положения. Шаговые двигатели применяются в устройствах компьютерной памяти — НГМД, НЖМД, устройствах чтения оптических дисков.
Если брать во внимание микромашины, то наиболее удобным способом обеспечения питания можно назвать реверсивный импульстный преобразователь постоянного тока в постоянный, силовая схема которого получила название H-мост
1. Шаговый двигатель
Шаговый двигатель – бесколлекторный электродвигатель постоянного тока, преобразующий сигнал управления в угловое перемещение ротора с возможной его дальнейшей фиксацией.
Достоинства шагового двигателя:
- Угол поворота ротора определяется числом импульсов, которые поданы на драйвер, нет необходимости в обратной связи, а скорость пропорциональна частоте входных импульсов
- Точное позиционирование и повторяемость, ошибка не накапливается от шага к шагу
- Быстрый старт/реверс
- Возможность получения низких скоростей и, следовательно, отсутствует необходимость в применении редуктора
- Отсутствие коллектора, следовательно, высокая надёжность
- В двигателях с постоянными магнитами имеется фиксирующий момент (когда статор обесточен), равный примерно 10% от момента удержания
Недостатки:
- Номинальное потребление энергии даже без нагрузки
- Возможен пропуск шага, следовательно, потеря контроля положения
- Явление резонанса (момент равен нулю на частоте резонанса)
- Затруднена работа на высоких скоростях, вследствие не мгновенного нарастания тока
По конструкции шаговые двигатели делятся на три основных типа:
- Двигатели с переменным магнитным сопротивлением
- Двигатели с постоянными магнитами
- Гибридные двигатели
1.1 Двигатели с переменным магнитным сопротивлением
Данные двигатели имеют несколько полюсов на статоре и ротор зубчатой формы из магнитомягкого материала. Намагниченность ротора отсутствует.
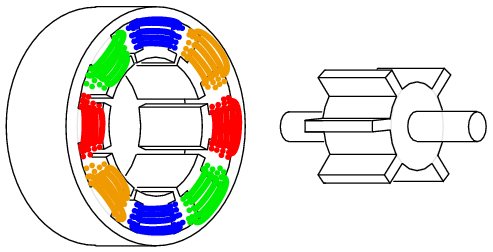
Рисунок 1 – Конструкция двигателя с переменным магнитным сопротивлением
На анимации изображён шаговый двигатель с шестью полюсами на статоре и четырьмя на роторе и имеет 3 независимые статорные обмотки. Такой двигатель имеет шаг 30°. При протекании тока через одну из обмоток, ротор стремится занять положение напротив соответствующих ей полюсов. Для изменения положения ротора необходимо обесточить текущую обмотку и подключить к питанию следующую. Например, используя последовательность обмоток 1-2-3, ротор будет вращаться по часовой стрелке. Напротив, используя последовательность 1-3-2, ротор будет вращаться против часовой стрелки. Данный тип двигателя нечувствителен к направлению протекания тока в обмотках. Вследствие отсутствия намагниченности ротора, не имеет фиксирующего момента и обеспечивает меньший рабочий момент в сравнении с другими типами шаговых двигателей.
Рисунок 2 – Работа двигателя с переменным магнитным сопротивлением
1.2 Двигатели с постоянными магнитами
Конструкция статора данного типа двигателей мало чем отличается от конструкции двигателей с переменным магнитным сопротивлением. Главное отличие в роторе, он содержит постоянные магниты. Чередующиеся полюса ротора имеют прямолинейную форму и расположены параллельно оси двигателя.
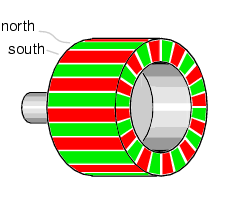
Рисунок 3 – Конструкция ротора двигателя с постоянными магнитами
На анимации приведен двухфазный двигатель, имеющий три пары полюсов ротора и две пары полюсов статора, что позволяет обеспечить аналогично предыдущему примеру величину шага 30°. Для вращения против часовой стрелки необходимо использовать следующую последовательность коммутации фаз (+1)-(+2)-(-1)-(-2), соответственно по часовой (+1)-(-2)-(-1)-(+2). Вследствие намагниченности ротора, данный тип двигателей обеспечивает больший момент в сравнении с двигателем с переменным магнитным сопротивлением, а также имеет фиксирующий момент. Максимальная скорость данного типа двигателей ограничивается обратной ЭДС со стороны ротора.
Рисунок 4 – Работа двигателя с постоянными магнитами
1.3 Гибридные двигатели
У гибридного двигателя ротор разделен на две части, между которыми расположен цилиндрический постоянный магнит. Зубцы одной половины ротора являются северными полюсами, а зубцы другой половины – южными. Половины ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половин.
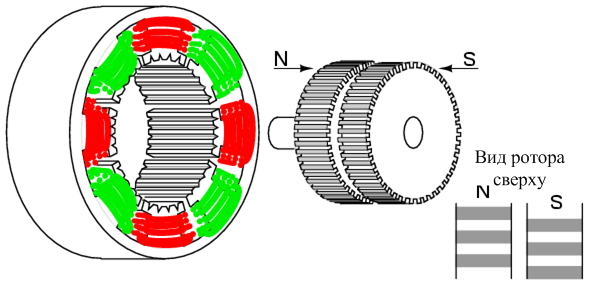
Рисунок 5 – Конструкция гибридного двигателя
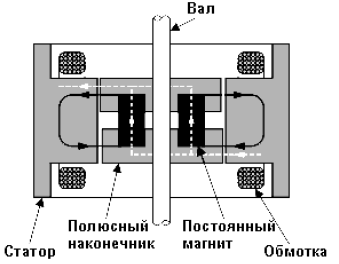
Рисунок 6 – Конструкция ротора гибридного двигателя
Наиболее распространены шаговые двигатели с числом шагов на оборот от 100 до 500 (3,6° – 0,72° на один шаг). Гибридный двигатель объединяет преимущества первых двух типов двигателей: малый шаг поворота и большой момент. По сути это двигатель с постоянными магнитами, но с большим количеством полюсов. Количество шагов на оборот пропорционально количеству фаз статора и количеству полюсов (зубцов) ротора. В данный момент этот тип двигателя наиболее распространён.
Рисунок 7 – Работа гибридного двигателя
В дальнейшем при рассмотрении работы шагового двигателя будем рассматривать двухфазный шаговый двигатель с постоянными магнитами, с двумя парами полюсов на статоре и одной парой полюсов на роторе.
1.4 Классификация шаговых двигателей по способу питания
Различают двигатели:
- Биполярные
- Униполярные
Рисунок 8 – Биполярный (1), униполярный (2) и четырёхобмоточный (3) двигатели
В биполярных двигателях каждая фаза имеет одну обмотку (рис. 8.1), следовательно, для изменения направления магнитного поля необходимо изменять полярность питающего напряжения. В дрвайвере такого двигателя необходимо использовать мостовой преобразователь.
В униполярных двигателях из середины каждой обмотки сделан вывод, что позволяет переключением половины обмоток изменять направление магнитного поля. Это упрощает схему драйвера, т.к. теперь нет необходимости изменения полярности напряжения. Достаточно лишь использовать четыре простых ключа. Иногда униполярные двигатели имеют четыре раздельных обмотки. Любой униполярный двигатель может работать как биполярный, просто оставив выводы AB и CD неподключенными или закоротив выводы A’B и C’D.
Момент, создаваемый шаговым двигателем, пропорционален его магнитному полю. Чтобы увеличить магнитный поток необходимо увеличить число витков или увеличить ток. Проблемой использования униполярного двигателя является то, что в каждый момент времени используется только половина обмотки, что приводит к снижению момента.
1.5 Способы управления шаговым двигателем
Различают:
- Полношаговый режим без перекрытия фаз
- Полношаговый режим с перекрытием фаз
- Полушаговый режим
- Микрошаговый режим
Полношаговый режим без перекрытия фаз. В этом режиме в один момент времени получает питание только одна фаза двигателя. Полюса ротора стремятся занять положение напротив запитанной обмотки, в зависимости от направления протекания тока в ней. Недостатком данного способа является меньший момент двигателя.
Рисунок 9 – Диаграммы работы для униполярного и биполярного двигателей
Полношаговый режим с перекрытием фаз. Характерной чертой данного режима есть то, что одновременно получают питания две соседние фазы и ротор останавливается не напротив полюсов, а в промежуточном положении между ними. Данный способ коммутации фаз обеспечивает в корень из двух раз больший момент. При останове двигателя важно не обесточивать его обмотки, чтобы двигатель обеспечивал полный момент, так как может произойти смещение ротора на половину шага и соответственно потеря положения.
Рисунок 10 – Диаграммы работы для униполярного и биполярного двигателей
Полушаговый режим является комбинацией двух вышеназванных, т. е. ротор останавливается как напротив полюсов, так и в промежуточном положении между ними. С одной стороны это позволяет уменьшить шаг в два раза, с другой будут иметь место скачки момента, так как когда две фазы получают питание, то момент будет в корень из двух раз больше. Чтобы избежать этого явления, в момент, когда включены две фазы, необходимо занижать на них ток тоже в корень из двух раз, но это приведёт к общему уменьшению момента. Одной из проблем полушагового режима также является переход в состояние с одной включённой фазой. Дело в том, что нужно как можно быстрее свести в выключаемой фазе ток к нулю. Например, используя H-мост, это осуществляется выключением всех ключей, что приводит к тому, что большой разрядный ток течёт через диоды и источник питания. Если же оставить один ключ замкнутым, то контур разряда будет включать в себя диод и ключ, поэтому ток будет спадать медленнее.
Рисунок 11 – Диаграмма работы для униполярного двигателя
Рисунок 12 – Диаграмма работы для биполярного двигателя
Микрошаговый режим. Полушаговый режим является частным случаем микрошагового. Изменяя соотношение токов в фазах двигателя можно добиться любого положения ротора между соседними полюсами. Чтобы суммарный момент оставался постоянной величиной, амплитуды моментов, создаваемые каждой фазой должны выбираться из соотношения M21max+ M22max = M2ном. На графиках приведены примеры таких соотношений.
Рисунок 13 – Момент шагового двигателя в функции угла поворота, ротор смещён относительно фазы B на: (1) - 30°, (2) - 22,5°, (3) - 15°
Зависимость соотношений амплитуд моментов от угла поворота до полюса следующей фазы – характеристика не линейная. Координаты точки равновесия рассчитываются как:
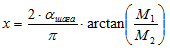
Следовательно, возможно фиксировать ротор в любой произвольной позиции.
Рисунок 14 – Зависимость угла поворота ротора от соотношения моментов
1.6 Управление питанием шагового двигателя
Для управления униполярным двигателем достаточно двух ключей на фазу, которые обеспечивают протекание тока в каждой из половинок обмоток. Дополнительные диоды в схеме с униполярным питанием необходимы из-за того, что половины обмоток находятся на общем сердечнике и тесно связаны друг с другом, следовательно, они работают как автотрансформатор и выбросы напряжения возникают на выводах обеих обмоток. Для питания каждой обмотки биполярных двигателей необходим H-мост. Он обеспечивает протекание тока, как в прямом, так и обратном направлении. Разрядный ток обмотки при этом протекает через диоды и источник питания. При управлении ключами H-моста необходимо убедится, чтобы не были включены одновременно два ключа одного плеча, что приведёт к короткому замыканию.
Рисунок 15 – Направление протекания токов в преобразователе напряжения
Так как обмотка двигателя содержит индуктивность, то ток в ней не может измениться мгновенно, следовательно, если прикладывать к ней импульсы напряжения прямоугольной формы, то ток будет иметь иную форму. На низкой скорости это явление не будет сильно оказывать влияние на момент. На высокой скорости ток может даже не достигать своего максимума, циклично нарастая и спадая. Поэтому необходимо в начальный момент времени повысить уровень подаваемого напряжения для обеспечения максимально быстрого темпа нарастания тока. Кроме того для различных режимов работы необходимо поддерживать заданное значение тока в фазах двигателя, поэтому целесообразно применение регулятора тока. Для этих целей замечательно подходит релейный регулятор, который поддерживает заданное значение тока в пределах своей уставки. Если ток пытается покинуть заданный «коридор», то происходит переключение значения напряжения на противоположное, что приводит к уменьшению (или увеличению, в зависимости от предыдущего знака di/dt) тока. Следовательно, к двигателю прикладывается два уровня напряжения ±Uп. И чем выше его модуль, тем больший темп нарастания тока можно обеспечить.
Рисунок 16 – Управление напряжением
Рисунок 17 – Управление током
Рисунок 18 – Микрошаговый режим
Все функции управлением шаговым двигателем ложатся на драйвер. Он должен решать следующие задачи:
- иметь возможность включать и выключать ток в обмотках, а также менять его направление;
- поддерживать заданное значение тока;
- обеспечивать как можно более быстрое нарастание и спад тока для хороших скоростных характеристик.
Рисунок 19 – Функциональная схема системы управления шаговым двигателем
1.7 Пуск шагового двигателя. Явление резонанса
Начиная с некоторой частоты коммутации фаз, момент начинает резко уменьшаться. Это затрудняет пуск на высоких скоростях. Для шаговых двигателей приводится следующая зависимость, которая отображает максимальную скорость пуска и работы при заданном моменте. Сначала необходимо выполнить запуск из области старта и далее «разогнать» двигатель до нужной скорости. Торможение выполняется в обратном порядке. Если же попытаться стартовать на большей скорости, то это приведёт к пропуску шагов.
Рисунок 20 – Зависимость момента от частоты коммутации
Резонанс шагового двигателя. Делая шаг, ротор двигателя совершает затухающие колебания. Следовательно, систему статор – магнитное поле – ротор можно рассматривать как пружинный маятник, который характеризует частота колебаний. Эта частота и является резонансной. На этой частоте коммутации фаз момент будет равен нулю, следовательно, при работе её нужно избегать.
где, N – число шагов на оборот двигателя. Как видно резонансная частота зависит он момента инерции нагрузки, при чём, чем больше нагрузка, тем меньше частота.
Способы борьбы с резонансом:
- Применение специальных муфт связи с нагрузкой
- Замыкание накоротко неиспользуемых обмоток
- Использование алгоритмов работы, при которых одновременно используется наибольшее число фаз
- Применение микрошагового режима
2. Двигатель постоянного тока
Машина постоянного тока – электрическая машина, предназначенная для преобразования механической энергии в электрическую постоянного тока (генератор) или для обратного преобразования (двигатель).
Принцип действия. Машина постоянного тока имеет обмотку возбуждения, расположенную на явно выраженных полюсах. По обмотке протекает постоянный ток (ток возбуждения), создающий магнитное поле возбуждения. На роторе расположена двухслойная обмотка, в которой при вращении ротора индуцируется переменная ЭДС. С помощью механического преобразователя энергии – коллектора, эта ЭДС выпрямляется. При заданном направлении вращения якоря направление ЭДС, индуцируемой в его проводниках зависит от того, под каким полюсом находится проводник, поэтому во всех проводниках, расположенных под одним полюсом, направление ЭДС одинаково и сохраняется таким независимо от частоты вращения.
Рисунок 21 – Работа двигателя постоянного тока
Конструктивно машина постоянного тока состоит из статора (на котором находится обмотка возбуждения), ротора (якоря) и щеточно-коллекторного аппарата (преобразовании переменной ЭДС в постоянное напряжение или наоборот).
По способу электрического соединения обмоток двигатели постоянного тока бывают независимого, параллельного, последовательного и смешанного возбуждения. Способ соединения обмоток влияет на вид статических и динамических характеристик.
Рисунок 22 – Cхемы соединения обмоток ДПТ
Наибольшее распространение получили ДПТ с независимым возбуждением. Отличительной их чертой является возможность раздельного управления тока якоря (управление в первой зоне, ниже скорости холостого хода) и магнитного потока (во второй зоне, выше скорости холостого хода). Используя уравнение якорной цепи, выразив из него ЭДС и разделив на произведение магнитного потока и конструктивной постоянной, получим уравнение механической статической характеристики:
Из него хорошо видно, что скорость двигателя можно изменить тремя способами – изменением напряжения якоря, изменением магнитного потока, введением добавочных сопротивлений. Регулирование с помощью введения добавочных сопротивлений крайне неэффективно, ввиду уменьшения КПД и необходимости в мощных резисторах, требующих хорошего охлаждения. Поэтому данный способ регулирования рассмотрен не будет. При этом можно заметить, что характеристики полученные ослаблением поля имеют различную жёсткость, которая меньше чем у естественной механической характеристики.
Рисунок 23 – Регулирование скорости изменением напряжения
Рисунок 24 – Регулирование скорости изменением сопротивления якоря
Рисунок 25 – Регулирование скорости ослаблением магнитного потока
Рисунок 26 – Законы регулирования скорости в первой и второй зонах
Машина постоянного тока может работать как в двигательном (скорость двигателя ниже скорости холостого хода), так и в генераторном (выше скорости холостого хода) режиме, отдавая энергию в сеть.
Реверс осуществляется либо изменением направления тока якоря, либо изменением направления тока возбуждения.
2.1 Тормозные режимы ДПТ
Торможение можно осуществлять следующими способами:
- Генераторное торможение
- Торможение противовключением
- Динамическое торможение
Генераторное торможение (рекуперативное) – такое торможение применяется при переходе на более низкую скорость. При понижении напряжения скорость и соответственно ЭДС не могут мгновенно измениться, это приводит к тому, что ток меняет направление и начинает протекать от двигателя к источнику напряжения.
Рисунок 27 – Генераторное торможение
Торможение противовключением производится путём переключения полярности напряжения якоря и введением в его цепь добавочного сопротивления. По достижении точки 3 необходимо обесточить двигатель и, в зависимости от того какой момент нагрузки приложен, наложить механический тормоз.
Рисунок 28 – Торможение противовключением
Динамическое торможение осуществляется замыканием якоря двигателя на добавочное сопротивление. При активном моменте нагрузки необходимо также наложить механический тормоз при нулевой скорости.
Рисунок 29 – Динамическое торможение
2.2 Система подчинённого регулирования угловой скорости
Как видно из статических механических характеристик, с ростом момента угловая скорость уменьшается, что недопустимо в устройствах, где необходимо точное регулирование скорости и обеспечение одинакового момента на разных скоростях. Для этих целей применяют замкнутые системы регулирования с обратной связью по скорости или ЭДС/напряжению, которые компенсируют просадку по скорости путём поднятия напряжения якоря или ослабления магнитного поля, в зависимости от зоны регулирования.
Регулирование угловой скорости по цепи якоря. Запишем уравнение якорной цепи, уравнение момента, ЭДС а также второй закон Ньютона для вращательного движения, и, перейдя в операторную форму записи, найдём передаточные функции и составим структурную схему.
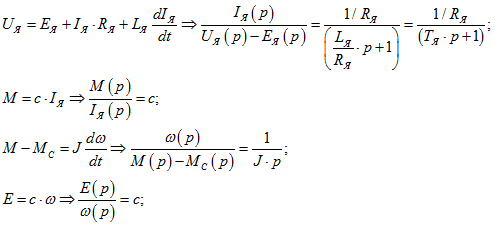
Рассчитывая регуляторы тока и скорости, пренебрегаем влиянием противо-ЭДС, считая его незначительным.
Суть настройки – реализация регулятора с ПФ обратной произведению ПФ прямой ветви и ветви ОС контура регулирования.
Для контура тока:
Но так как инерционность преобразователя невозможно скомпенсировать, мы её исключаем из синтеза. Так как в контуре тока присутствует возмущение, а его необходимо выполнить астатическим, следовательно, регулятор тока должен быть ПИ типа, но, исходя из выше сказанного, получаем ПД ПФ.
Умножив полученную ПФ на интегратор с постоянной времени Tт получим искомую ПФ:
Передаточная функция всего контура тока:
Рисунок 30 – Структурная схема контура регулирования тока
Рисунок 31 – Структурная схема контура регулирования скорости
Аналогично выполняется настройка контура регулирования скорости. В итоге получаем ПФ регулятора скорости и структурную схему всей системы целиком:
Рисунок 32 – Структурная схема всей системы
Так как целью дальнейшего исследования являются двигатели постоянного тока малой мощности, которые выполняют с возбуждением от постоянных магнитов, регулирование скорости во второй зоне рассматриваться не будет.
3. Понижающий реверсивный преобразователь постоянного тока в постоянный (H-мост)
H-мост — это электронная схема, которая дает возможность приложить напряжение к нагрузке в разных направлениях.
Замыкая ключи K1-K4, к нагрузке прикладывается положительное напряжение питания, в ином случае, замыкая К2-К3, к нагрузке прикладывается отрицательное напряжение питания.
Диоды, установленные параллельно ключам, обеспечивают путь для обратного тока индуктивной нагрузки. Если их не использовать, на выводах нагрузки будут возникать перенапряжения, что в случае применения полупроводниковых ключей приведёт к выходу их из строя.
Наиболее быстрый спад тока происходит, когда выключены все ключи и ток течёт через диоды D2-D3. Этот метод подходит для регулирования тока в обмотках шаговых двигателей, когда нужно перейти из состояния с двумя включенными обмотками в состояние с одной включенной.
Если же оставить включенным ключ К1, тогда ток потечёт по контуру D2-K1 и ток будет спадать медленнее. Этот вариант оптимален для ШИМ регулирования напряжения у двигателя постоянного тока.
Рисунок 33 – Структурная схема преобразователя
Широтно-импульсная модуляция (ШИМ) — управление средним значением напряжения на нагрузке путём изменения скважности импульсов, управляющих ключом.
Рисунок 34 – Принцип работы ШИМ
Например, исходя из схемы замещения двигателя постоянного тока, мы видим, что его якорная цепь представляет собой активно-индуктивную нагрузку. Следовательно, ток якоря не может изменяться мгновенно и будет иметь место переходный процесс. Поэтому чередуя импульсы и паузы можно добиться такого же эффекта, как будто якорь питается от постоянного напряжения. На графике хорошо видно, что, несмотря на колебания напряжения, ток изменяется всего в пределах нескольких процентов, и это не оказывает существенного влияния на момент.
Рисунок 35 – Переходный процесс тока
Выводы
При написании данного реферата магистерская работа еще не завершена. Окончательное завершение: декабрь 2014 года. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты. Эта часть реферата исключительно обзорная. Дальнейшая работа будет направлена на эксперементальное исследование электроприводов постоянного тока и устройств, включающих их в себя.
Список источников
- Емельянов А.В. Шаговые двигатели: учеб. пособие/ А.В. Емельянов, А.Н. Шилин/ВолгГТУ. - Волгоград, 2005. - 48 с.
- Tony R. Kuphaldt. Lessons In Electric Circuits, Volume II – AC, Sixth Edition, 2007. - 561 с.
- Брускин Д.Э., Зорохович А.Е., Хвостов В.С. Электрические машины и микромашины: Учеб. для электротехн. спец. вузов. - 3-е изд., перераб. и доп. - М.: Высш. шк., 1990. - 528 с.
- Дискретный электропривод с шаговыми двигателями. Под общ. ред. М.Г. Чиликина. М., «Энергия», 1971. - 624 c.
- Ion Boldea. Electric drives. — Lexington, KY, USA — 2005, - 549 с.
- Чиликин М.Г., Сандлер А.С. Общий курс электропривода: Учебник для вузов. - 6-е изд., доп. и перераб. - М.: Энергоиздат, 1981. - 576 с.
- Теория электропривода, ч.1: учебное пособие / Сост.: А.Б.Зеленов – Алчевск, ДонГТУ, 2005. – 382 с.
- Matlab R2013a documentation center [электронный ресурс].–Режим доступа: www.mathworks.com