
Для расчета траектории движения судна требуются большие вычислительные возможности. В настоящее время основным направлением увеличения вычислительных мощностей является организация параллельных вычислений с использованием соответствующих методов и алгоритмов. Для реализации эффективного распараллеливания вычислений необходим переход на новые технологии и новые параллельные методы решения задач, которые позволят существенно снизить стоимость вычислений. Современные технологии предоставляют два основных направления распараллеливания вычислительных средств: многоядерные процессоры (CPU) и графические процессоры (GPU).
До последнего времени ключевым компонентом систем для высокопроизводительных вычислений, включая кластеры, был центральный процессор. Однако несколько лет назад у него появился серьезный конкурент – графический процессор (GPU). Высокая производительность GPU объясняется особенностями его архитектуры. В отличие от центрального процессора, который состоит из нескольких ядер, графический процессор изначально создавался как многоядерная структура, в которой количество компонентов измеряется сотнями.
Требования повышения безопасности движения транспортных средств, защиты окружающей среды, снижение влияния субъективного фактора на качество управления, повышение степени автоматизации управления требуют применения новых технологий и средств моделирования.
Автоматизация систем управления движением как транспортного средства (автомобиля, самолета, судна) в целом, так и совокупностью участников движения позволяет более интенсивно эксплуатировать транспортный коридор, увеличить безопасность подвижных объектов транспортного потока, снизить расход топлива, оптимально использовать режимы работы двигателя транспортного средства.
Одним из важнейших направлений интеллектуализации транспортных средств является разработка систем автоматизированного судовождения. Проблемы повышения безопасности судоходства в стесненных условиях, экономии энергоресурсов и снижения экологической нагрузки на окружающую среду требуют разработки систем автоматического управления движением судна и групп судов по заданному фарватеру. Пример интенсивного трафика водного транспорта показан на рис.1.

Рисунок 1 – Пример интенсивного трафика водного транспорта [13]
Одним из важнейших направлений интеллектуализации транспортных средств является разработка систем автоматизированного судовождения. Проблемы повышения безопасности судоходства в стесненных условиях, экономии энергоресурсов и снижения экологической нагрузки на окружающую среду требуют разработки систем автоматического управления движением судна по заданному фарватеру, т.е. интегрированной навигационной системы (ИНС) для судов внутреннего и смешанного плавания (СВСП). Основной целью ИНС для СВСП является повышение безопасности движения на внутренних водных путях благодаря освобождению судоводителя от решения навигационных расчетов. Это обеспечивается за счет предоставления ИНС обширной информации о навигационной обстановке и участниках движения. Кроме того, ИНС обеспечивает увеличение экономичности судна и улучшение координации по управлению транспортными потоками. Для выполнения этих целей в пределах БВК в составе ИНС необходимо решить ряд задач, а именно:
Структура ИНС для СВСП приведена на рис.2. и включает в себя следующие основные блоки: бортовые датчики информации, базы априорных знаний, блок определения местоположения судна, блок оценки навигационной обстановки, блок визуализации и диалога с судоводителем, блок управления исполнительными механизмами.
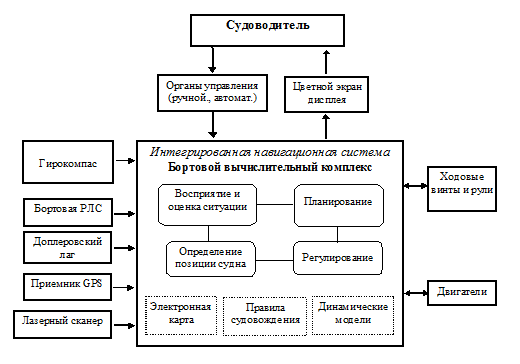
Рисунок 2 – Структура ИНС для внутреннего и прибрежного судоходства [14]
Использование математических моделей в контуре управления предоставляет возможность исследования и анализа различных состояний объекта, прогнозирования его поведения в зависимости от управляющих воздействий и внешних факторов, действующих на управляемый объект. Однако высокая эффективность достигается при управлении объектом в составе группы и осуществляется в сильносвязном информационном пространстве. Сильносвязность предполагает воплощение принципа "всё зависит от всего". В глобальном информационном пространстве такие системы становятся изначально крайне неустойчивыми, что предъявляет особые требования к качеству математических моделей, а также к вычислительным системам и сетевым средствам их воплощения в ресурсах глобальных сетей.
В книге «Ходкость и управляемость судов» [8] рассмотрены вопросы ходкости и управляемости судов внутреннего и смешанного плавания. Изложены теоретические основы и методы практического расчёта сопротивления окружающей среды движению судна. Даны сведения по теории, расчётам и проектированию гребных винтов и других движителей. Представлен материал по управляемости судов и составов при движении и маневрировании. При составлениии системы уравнений, описанной в статье Разработка подсистемы расчета координат траектории движения судна с использованием технологии NVIDIA CUDA [14], в соответствии с основной идеей метода Кирхгофа, необходимо определить кинетическую энергию системы судно—жидкость. С этой целью принимается следующая система допущений.
Главной задачей является создание 3D модели корабля, которая будет двигаться в соответствиии с математической моделью движения корабля. Так как для этого необходимы большие вычислительные ресурсы, задача будет выполнена с использованием параллельных технологий.
Научной новизной будет применение технологии CUDA для решения поставленной задачи.
Исследования в данной темы активно в стенах ДонНТУ. В частности, этим занимается факультет КНТ, кафедра КИ. Под управлением проф. Святного В.А. сделано очень много работы. К списку которых можно отнести работы Кривошеева С.В., Аноприенко А.Я. [3]. Темы их работ посвящены исследованиям управления речных судов в среде Matlab/Simulink, а также моделированию процессов обработки информации в интегрированной навигационной системе. Глобальные достижения в этой сфере давно перешли на качественно новый уровень и идея интегрированных навигационных систем выражается в создании новой тенденции в судоходстве, которая способна существенно снизить человеческий фактор в судоходстве. Разработки в данном направлении активно проводятся нашими партнёрами в Max Plank институте (Германия), отделе Integrated Navigation Systems. Также очень активную работу в этой отрасли ведут в Норвегии под руководством профессора I. Fossen [13, 6]. На их сайте представленно большое количество библиотек необходимых для разработки навигационных и управлющих систем. Причем все они распространяются свободно и могут быть модифицированны, так как распространяются под лицензией GNU.
Для создания математической модели использовались две основные книги: «Ходкость и управляемость судов» под редакцией В.Г. Павленко [8] и Marine Control Systems [7], автором которой является Thor I. Fossen.
Хотя технические средства обеспечения ходкости и управляемости судов (шест, весло, парус, руль) возникли в глубочайшей древности, наука в этой области относительно молода.
Первым по времени возникло учение о сопротивлении среды перемещению в ней тел. Предыстория этого учения связана с воззрениями Аристотеля (IV в. до н. э.), согласно которым всякое движение требует непрерывного приложения к телу внешней среды. Такая сила, согласно учению Аристотеля, возникает за счет смыкания жидкости за телом и приложена к кормовой оконечности тела.
Эти представления просуществовали до XVII столетий до работ основоположника высшей математики и классической механики Исаака Ньютона. Ньютон в своих Математических началах натуральной философии приводит теоретический вывод квадратичного закона сопротивления, как реакции от удара жидкости о лобовую часть тела. Другая часть сопротивления, по Ньютону, происходит от вязкого трения жидкости о поверхность тела. Повышение давления в кормовой оконечности, предсказанное еще Аристотелем, Ньютоном не учитывается. Отсюда следовал парадоксальный вывод о том, что форма кормовой оконечности не влияет на сопротивление тела, что противоречило накопленному к тому времени опыту мореплавания.
Настоящая история учения о ходкости и управляемости судов началась с работ основоположника теоретической гидромеханики и теории корабля, члена Петербургской Академии наук Леонарда Эйлера (1707—1783 гг.). Толчок развитию гидродинамики дало введенное им представление о жидкости и газе как о сплошных средах. Из полученных Эйлером уравнений гидродинамики идеальной жидкости математическим путем выводится и знаменитый парадокс д’Аламбера (1744 г.), согласно которому сопротивление при равномерном движении тела в безграничной идеальной жидкости равно нулю. Объяснение парадокса было дано Эйлером, который подчеркнул отличие действительной жидкости, обладающей внутренним трением (вязкостью), от идеальной.
Леонардом Эйлером были получены й первые уравнения движения судна по криволинейной траектории, опубликованные в его капитальном труде «Полное умозрение строения и вождения кораблей», русское издание которого датируется 1776 г. Это время можно считать началом возникновения учения об управляемости судов.
Современник Эйлера Даниил Бернулли получил известное уравнение связи между скоростью и давлением в идеальной жидкости. Им же введен и сам термин «гидродинамика». Со времен Эйлера и Бернулли гидродинамика становится фундаментом учения о ходкости и управляемости судов. В свою очередь, необходимость решения задач ходкости в связи с появлением на флоте паровых двигателей стимулировала развитие гидродинамики.
В первой половине XIX столетия трудами О. Коши и его последователей создана теория волн малой амплитуды, на базе которой в дальнейшем развивалась теория волнового сопротивления судов. Д. Стоксом и другими исследователями получены уравнения движения вязкой жидкости. В 70-х годах Г. Кирхгофом разработана теория произвольного движения тел в идеальной жидкости. Трудами У. Томсона и Г. Гельмгольца установлены основные закономерности вихревых движений жидкости.
Параллельно развивалась и экспериментальная гидродинамика — общая и судовая. Осборном Рейнольдсом обстоятельно изучены два режима движения вязкой жидкости (ламинарный и турбулентный), установлена роль критерия, носящего его имя, положено начало теории турбулентных движений жидкости. Уильямом Фрудом разработана методика моделирования сопротивления воды движению судов в опытовых бассейнах. Им показано, что особенности создаваемой судном системы волн и закономерности волнового сопротивления зависят от значения относительной скорости (в дальнейшем — числа Фруда), дан эмпирический метод расчета сопротивления трения судна и его модели. Его сыном Реджимоном Фрудом в конце 90-х годов выявлены основные особенности влияния мелководья на сопротивление судов.
Вопросами ходкости судов при неустановившемся движении занималась большая группа исследователей. Начало этому направлению положено в трудах Нордстрема и Г.Е. Павленко (1928—1934 гг.). Из более поздних работ следует отметить труды И.Я. Миниовича, а также В.И. Небеснова и его учеников. Метод расчета характеристик разгона и торможения речных судов и толкаемых составов с учетом мелководья и течения разработан в начале 70-х годов в НИИВТе.
На развитие учения об управляемости судов большое влияние оказали успехи гидро- и аэродинамики, в частности работы Н.Е. Жуковского и его последователей в области теории крыла, а также работы Г. Кирхгофа по теории движения тел в идеальной жидкости. Многие понятия и методы были перенесены в область управляемости судов из аэродинамики воздушных кораблей, особенно дирижаблей (работы К.К. Федяевского и др.).
Поворотным моментом, приведшим к созданию современной теории управляемости, явилось появление в конце 50-х годов нелинейной теории управляемости. В основу этой теории были положены результаты систематических модельных испытаний Р.Я. Першица, а также применение циркуляционно-отрывной теории крыла малого удлинения в работах К.К. Федяевского и Г.В. Соболева.
Практика речного судоходства, в первую очередь широкое внедрение толкания несамоходных судов, обусловила необходимость углубленного изучения маневренных качеств флота. В связи с этим советскими учеными на базе нелинейной теории управляемости, модельных и натурных испытаний созданы методы расчета управляемости судов и толкаемых составов в речных, условиях плавания [8].
На территории Украины вопросы судостроения и управление трафиком активно изучаются в Одессе [15].
Ведущим центром является Одесская Национальная Морская Академия [16]
В Донецком Национальном техническом Университете вопросами моделирования движения кораблей, созданием тренажёрных систем и интегрированных навигационных систем занимаются Кривошеев Сергей Васильевич, Анопринко Александр Яковлевич, Святный Владимир Андреевич [1, 2, 3, 4, 5].
Пионером в этой области был Потапеноко В.А. [25]
С точки зрения кинематики судно может рассматриваться как твердое тело с шестью степенями свободы [10,8]. Уравнения движения судна составляются на основании законов кинематики и динамики твердого тела, а также теории силового воздействия жидкости на движущееся тело [18].
Для изучения движения судна по свободной поверхности применяют следующие основные системы координат [10, 17]:
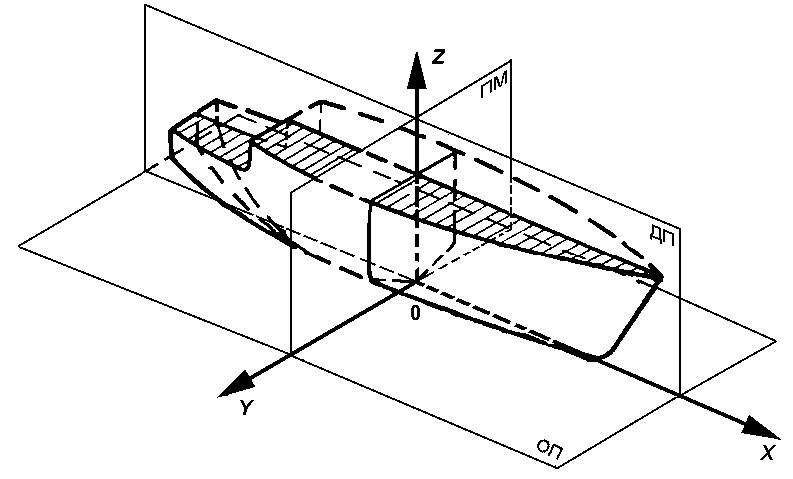
Рисунок 3 – Главные плоскости судна
Если судно в начальный момент движения находится в равновесии, то системы координат Orhn и Oxyz совпадают.
Преобразование из неподвижной системы координат в подвижную производится с помощью следующей матрицы перевода η:
где
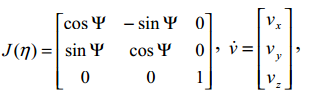
где v – вектор скорости; vx, vy, vz – проекции вектора скорости судна (рис. 4); Ψ – курс судна.
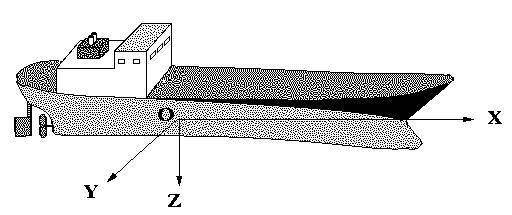
Рисунок 4 – Система координат судна
Более подробная информация по модели движения корабля изложена в статьях автора [14,19,20].
Для расчета траектории движения судна требуются большие вычислительные возможности. Поэтому при рассчёте координат используется технология параллельного программирования NVIDIA CUDA [9,11,12,23].
Вторая часть работы - это визуализация результатов. Для этого необходимо создать трёхмерную модель объекта (корабля). Этот объект будет двигаться по траектории, рассчитываемой математической моделью.
Для визуализации корабля используется Java2D [21]. Язык JAVA [22] выбран из-за его удобства и широких возможностей. Также важным фактором является кроссплатформенность приложений, написанных на языке JAVA.
На рисунке 5 представлена упрощённая трёхмерная модель корабля.
Рисунок 5 – Упрощённая трёхмерная модель корабля
(анимация: 15 кадров, 3 цикла повторения, 83 килобайта)
Задача управления водным трафиком является актуальной. Для её решения необходимы качественные, сложные, точные математические модели, описывающие движение каждого объекта. Часто необходимо учитывать форму и мелкие детали объектов, например, когда они находятся на малом расстоянии друг от друга. Для этого потребуется 3D-модель каждого участника водного движения. Всё это требует больших вычислительных ресурсов.
В рамках проведенных услоыий выполнено:
Достижение поставленной цели предполагает выполнение большого объёма работы. Поэтому задача разделена между двумя студентами на две подзадачи:
Моя часть работы связана с визуализацией. Намечены следующие цели:
Технологии jcuda позволяет использовать преимущества CUDA при разработке основной части проекта на привычном для многих языке JAVA. В этом я вижу целесообразность её применения.
JAVA - это мощный, современный, популярный язык, обладающий большим количеством достоинств. Он хорошо подходит для выполнения моей магистерской работы. Кроме того, использование языка JAVA обусловлено рекомендацией кафедры и моими личными предпочтениями.
При написании данного реферата магистерская работа еще не завершена. Окончательное завершение: декабрь 2013 года. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты.