
Комп'ютерні системи та мережі
Для розрахунку траєкторії руху судна потрібні великі обчислювальні можливості. В даний час основним напрямком збільшення обчислювальних потужностей є організація паралельних обчислень, з використанням відповідних методів і алгоритмів. Для реалізації ефективного розпаралелювання обчислень необхідний перехід на нові технології і нові паралельні методи розв'язання задач, які дозволять суттєво знизити вартість обчислень. Сучасні технології надають два основних напрямки розпаралелювання обчислювальних засобів: багатоядерні процесори (CPU) і графічні процесори (GPU).
До останнього часу ключовим компонентом систем для високопродуктивних обчислень, включаючи кластери, був центральний процесор. Однак кілька років тому у нього з'явився серйозний конкурент - графічний процесор (GPU). Висока продуктивність GPU пояснюється особливостями його архітектури. На відміну від центрального процесора, який складається з декількох ядер, графічний процесор спочатку створювався як многоядерная структура, в якій кількість компонентів вимірюється сотнями.
Вимоги підвищення безпеки руху транспортних засобів, захисту навколишнього середовища, зниження впливу суб'єктивного чинника на якість управління, підвищення ступеня автоматизації управління вимагають застосування нових технологій і засобів моделювання.
Автоматизація систем управління рухом як транспортного засобу (автомобіля, літака, судна) в цілому, так і сукупністю учасників руху дозволяє більш інтенсивно експлуатувати транспортний коридор, збільшити безпеку рухливих об'єктів транспортного потоку, знизити витрату палива, оптимально використовувати режими роботи двигуна транспортного засобу.
Одним з найважливіших напрямків інтелектуалізації транспортних засобів є розробка систем автоматизованого судоводіння. Проблеми підвищення безпеки судноплавства в обмежених умовах, економії енергоресурсів і зниження екологічного навантаження на навколишнє середовище вимагають розробки систем автоматичного управління рухом судна і груп суден за заданим фарватером. Приклад інтенсивного трафіку водного транспорту зображений на рис.1.

Рисунок 1 – Приклад інтенсивного трафіку водного транспорту [13]
Одним з найважливіших напрямків інтелектуалізації транспортних засобів є розробка систем автоматизованого судноводіння. Проблеми підвищення безпеки судноплавства в обмежених умовах, економії енергоресурсів і зниження екологічного навантаження на навколишнє середовище вимагають розробки систем автоматичного управління рухом судна по заданому фарватеру, тобто інтегрованої навігаційної системи (ІНС) для суден внутрішнього та змішаного плавання (СВЗП). Основною метою ІНС для СВЗП є підвищення безпеки руху на внутрішніх водних шляхах завдяки звільненню судноводія від вирішення навігаційних розрахунків. Це забезпечується за рахунок надання ІНС великої інформації про навігаційної обстановці і учасниках руху. Крім того, ІНС забезпечує збільшення економічності судна і поліпшення координації з управління транспортними потоками. Для виконання цих цілей у межах БВК у складі ІНС необхідно вирішити ряд завдань, а саме:
Структура ІНС для СЗСП наведена на рис.2. і включає в себе такі основні блоки: бортові датчики інформації, бази апріорних знань, блок визначення місця розташування судна, блок оцінки навігаційної обстановки, блок візуалізації та діалогу з судноводієм, блок управління виконавчими механізмами.
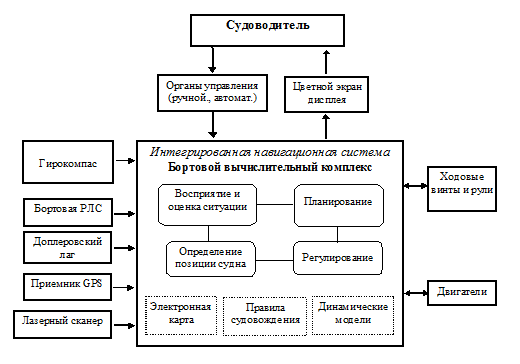
Рисунок 2 – Структура ІНС для внутрішнього і прибережного судноплавства [14]
Використання математичних моделей в контурі управління надає можливість дослідження і аналізу різних станів об'єкта, прогнозування його поведінки в залежності від керуючих впливів і зовнішніх факторів, що діють на керований об'єкт. Однак висока ефективність досягається при управлінні об'єктом у складі групи і здійснюється сильносвязний інформаційному просторі. Сильносвязний передбачає втілення принципу "все залежить від усього". У глобальному інформаційному просторі такі системи стають спочатку вкрай нестійкими, що висуває особливі вимоги до якості математичних моделей, а також до обчислювальних систем і мережевих засобів їх втілення в ресурсах глобальних мереж.
У книзі «Ходкость и управляемость судов» [8] розглянуті питання ходкості і керованості суден внутрішнього та змішаного плавання. Викладено теоретичні основи і методи практичного розрахунку опору навколишнього середовища руху судна. Дано відомості з теорії, розрахунками та проектуванню гребних гвинтів та інших рушіїв. Представлений матеріал по керованості суден і складів при русі і маневруванні. При складанні системи рівнянь, описаної в статті Розробка підсистеми розрахунку координат траєкторії руху судна з використанням технології NVIDIA CUDA [14], відповідно до основною ідеєю методу Кірхгофа, необхідно визначити кінетичну енергію системи судно-рідина. З цією метою приймається наступна система припущень.
Головним завданням є створення 3D моделі корабля, яка буде рухатися відповідно до математичної моделлю руху корабля. Так як для цього необхідні великі обчислювальні ресурси, завдання буде виконано з використанням паралельних технологій.
Науковою новизною буде застосування технології CUDA для вирішення поставленого завдання.
Дослідження в даній теми активно в стінах ДонНТУ. Зокрема, цим займається факультет КНТ, кафедра КІ. Під управлінням проф. Святного В.А. зроблено дуже багато роботи. До переліку яких можна віднести роботи Кривошеєва С.В., Анопрієнко О.Я. [3]. Теми їхніх робіт присвячені дослідженням управління річкових суден в середовищі Matlab / Simulink, а також моделюванню процесів обробки інформації в інтегрованій навігаційній системі. Глобальні досягнення у цій сфері давно перейшли на якісно новий рівень і ідея інтегрованих навігаційних систем виражається в створенні нової тенденції в судноплавстві, яка здатна істотно знизити людський фактор у судноплавстві. Розробки в даному напрямі активно проводяться нашими партнерами в Max Plank інституті (Німеччина), відділі Integrated Navigation Systems. Також дуже активну роботу в цій галузі ведуть в Норвегії під керівництвом професора I. Fossen [13, 6]. На їх сайті представленно велика кількість бібліотек необхідних для розробки навігаційних і управлющіх систем. Причому всі вони поширюються вільно і можуть бути модифікування, так як поширюються під ліцензією GNU.
Для створення математичної моделі використовувалися дві основні книги: «ходкості і керованість судів» під редакцією В.Г. Павленко [8] і Marine Control Systems [7], автором якої є Thor I. Fossen.
Хоча технічні засоби забезпечення ходкості і керованості судів (жердина, весло, вітрило, кермо) виникли в глибоку давнину, наука у цій галузі відносно молода.
Першим за часом виникло вчення про опір середовища переміщенню в ній тел. Передісторія цього вчення пов'язана з поглядами Аристотеля (IV ст. До н. е.), Згідно з якими всякий рух вимагає безперервного додатки до тіла зовнішнього середовища. Така сила, згідно з вченням Аристотеля, виникає за рахунок змикання рідини за тілом і прикладена до кормового краю тіла.
Ці уявлення проіснували до XVII століть до робіт основоположника вищої математики та класичної механіки Ісаака Ньютона. Ньютон у своїх Математичних засадах натуральної філософії призводить теоретичний висновок квадратичного закону опору, як реакції від удару рідини об лобову частину тіла. Інша частина опору, по Ньютону, походить від в'язкого тертя рідини об поверхню тіла. Підвищення тиску в кормовій частині, передбачене ще Аристотелем, Ньютоном не враховується. Звідси випливав парадоксальний висновок про те, що форма кормової краю не впливає на опір тіла, що суперечило накопиченому до того часу досвіду мореплавання.
Справжня історія вчення про ходкості і керованості судів почалася з робіт основоположника теоретичної гідромеханіки і теорії корабля, члена Петербурзької Академії наук Леонарда Ейлера (1707-1783 рр..). Поштовх розвитку гідродинаміки дало введене їм уявлення про рідини і газі як про суцільних середовищах. З отриманих Ейлером рівнянь гідродинаміки ідеальної рідини математичним шляхом виводиться і знаменитий парадокс д'аламбера (1744), згідно з яким опір при рівномірному русі тіла в безмежній ідеальної рідини дорівнює нулю. Пояснення парадоксу було дано Ейлером, який підкреслив відміну дійсної рідини, що володіє внутрішнім тертям (в'язкістю), від ідеальної.
Леонардом Ейлером були отримані й перші рівняння руху судна по криволінійній траєкторії, опубліковані в його капітальній праці «Повне умогляд будови і водіння кораблів», російське видання якого датується 1776 Цей час можна вважати початком виникнення вчення про керованість судів.
Сучасник Ейлера Данило Бернуллі отримав відоме рівняння зв'язку між швидкістю і тиском в ідеальній рідині. Їм же введений і сам термін «гідродинаміка». З часів Ейлера і Бернуллі гідродинаміка стає фундаментом вчення про ходкості і керованості судів. У свою чергу, необхідність вирішення завдань ходкості у зв'язку з появою на флоті парових двигунів стимулювала розвиток гідродинаміки.
У першій половині XIX століття працями О. Коші і його послідовників створена теорія хвиль малої амплітуди, на базі якої в подальшому розвивалася теорія хвильового опору судів. Д. Стоксом та іншими дослідниками отримані рівняння руху в'язкої рідини. У 70-х роках Г. Кирхгофом розроблена теорія довільного руху тіл в ідеальній рідині. Працями У. Томсона і Г. Гельмгольца встановлено основні закономірності вихрових рухів рідини.
Паралельно розвивалася і експериментальна гідродинаміка - загальна і суднова. Осборном Рейнольдсом докладно вивчені два режими руху в'язкої рідини (ламінарний і турбулентний), встановлено роль критерію, що носить його ім'я, покладено початок теорії турбулентних рухів рідини. Вільямом Фруде розроблена методика моделювання опору води руху суден у дослідному басейні. Їм показано, що особливості створюваної судном системи хвиль і закономірності хвильового опору залежать від значення відносної швидкості (надалі - числа Фруда), дан емпіричний метод розрахунку опору тертя судна і його моделі. Його сином Реджімоном Фруда в кінці 90-х років виявлено основні особливості впливу мілководдя на опір судів.
Питаннями ходкості судів при несталому русі займалася велика група дослідників. Початок цьому напрямку покладено в працях Нордстрема і Г.Є. Павленко (1928-1934 рр..). З пізніших робіт слід відзначити праці І.Я. Мініовіча, а також В.І. Небеснова і його учнів. Метод розрахунку характеристик розгону і гальмування річкових суден та суден, що штовхаються з урахуванням мілководдя і течії розроблений на початку 70-х років в НІІВТі.
На розвиток вчення про керованість судів великий вплив зробили успіхи гідро-і аеродинаміки, зокрема роботи Н.Є. Жуковського і його послідовників у галузі теорії крила, а також роботи Г. Кірхгофа з теорії руху тіл в ідеальній рідині. Багато поняття і методи були перенесені в область керованості судів з аеродинаміки повітряних кораблів, особливо дирижаблів (роботи К.К. Федяевского та ін.)
Переломним моментом, який привів до створення сучасної теорії керованості, з'явилася поява в кінці 50-х років нелінійної теорії керованості. В основу цієї теорії були покладені результати систематичних модельних випробувань Р.Я. Першиц, а також застосування циркуляционно-відривний теорії крила малого подовження в роботах К.К. Федяевского і Г.В. Соболєва.
Практика річкового судноплавства, в першу чергу широке впровадження штовхання несамохідних суден, зумовила необхідність поглибленого вивчення маневрених якостей флоту. У зв'язку з цим радянськими вченими на базі нелінійної теорії керованості, модельних та натурних випробувань створені методи розрахунку керованості суден і штовхаються складів в річкових, умови плавання [8].
На території України питання суднобудування і керування трафіком активно вивчаються в Одесі [15].
Провідним центром є Одеська національна морська академія [16]
У Донецькому Національному технічному Університеті питаннями моделювання руху кораблів, створенням тренажерних систем та інтегрованих навігаційних систем займаються Кривошеєв Сергій Васильович, Анопрінко Олександр Якович, Святний Володимир Андрійович[1, 2, 3, 4, 5].
Піонером у цій галузі був Потапеноко В.А. [25]
З точки зору кінематики судно може розглядатися як тверде тіло з шістьма ступенями свободи [10,8]. Рівняння руху судна складаються на підставі законів кінематики і динаміки твердого тіла, а також теорії силового впливу рідини на рухоме тіло [18].
Для вивчення руху судна по вільній поверхні застосовують такі основні системи координат [10,17 ]:
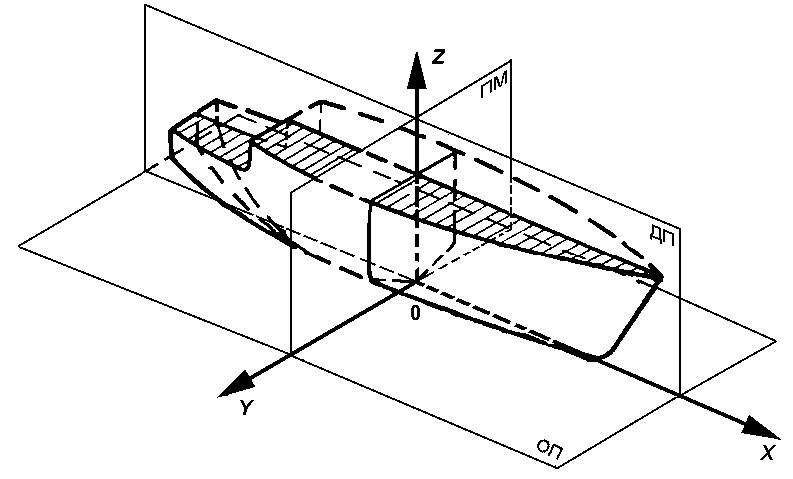
Рисунок 3 – Головні площини судна
Якщо судно в початковий момент руху знаходиться в рівновазі, то системи координат Orhn і Oxyz збігаються.
Перетворення з нерухомої системи координат в рухому виробляється за допомогою наступної матриці переводу η:
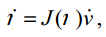
де
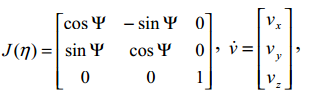
де v - вектор швидкості; vx, vy, vz - проекції вектора швидкості судна (рис. 4); Ψ – курс судна.
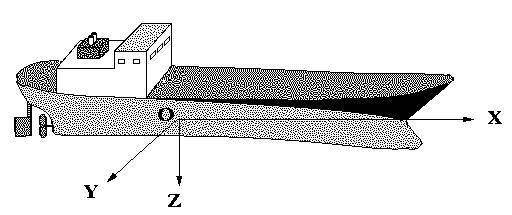
Рисунок 4 – Система координат судна
Більш детальна інформація за моделлю руху корабля викладена в статтях автора [14,19,20].
Для розрахунку траєкторії руху судна потрібні великі обчислювальні можливості. Тому при розрахунку координат використовується технологія паралельного програмування NVIDIA CUDA [9,11,12,23].
Друга частина роботи - це візуалізація результатів. Для цього необхідно створити тривимірну модель об'єкта (корабля). Цей об'єкт буде рухатися по траекторіі, що розраховується математичною моделлю.
Для візуалізації корабля використовується Java2D [21]. Мова JAVA [22] обраний через його зручності і широких можливостей. Також важливим фактором є кроссплатформенность додатків, написаних мовою JAVA.
На рисунку 5 представлена спрощена тривимірна модель корабля.
Рисунок 5 – Спрощена тривимірна модель корабля
(анімація: 15 кадрів, 3 цикли повторення, 83 кілобайт)
Задача управління водним трафіком є актуальною. Для її вирішення необіхдні якісні, складні, точні математичні моделі, які описують рух кожного об'єкта. Часто необхідно враховувати форму і дрібні деталі об'ектів, наприклад, коли вони знаходяться на малій відстані один від одного. Для цього буде потрібно 3D-модель кожного учасника водного руху. Все це вимагає великих обчислювальних ресурсів.
У рамках проведених досліджень виконано:
Досягнення поставленої мети передбачає виконання великого обсягу роботи. Тому завдання розділена між двома студентами на дві підзадачі:
Моя частина роботи пов'язана з візуалізацією. Намічені наступні цілі:
Технології jcuda дозволяє використовувати переваги CUDA при розробці основної частини проекту звичною для багатьох мовою JAVA. У цьому я бачу доцільність її застосування.
JAVA - це потужний, сучасний, популярний мову, що володіє великою кількістю достоїнств. Він добре підходить для виконання моєї магістерської роботи. Крім того, використання мови JAVA обумовлено рекомендацією кафедри і моїми особистими уподобаннями.
При написанні даного реферату магістерська робота ще не завершена. Остаточне завершення: грудень 2013 року. Повний текст роботи та матеріали по темі можуть бути отримані у автора або його керівника після зазначеної дати.