
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Cостояние вопроса
- 2. Движения Человека
- 3. Особенности расположения акселерометров при измерении движения человека
- 4. Выбранные устройства для создания системы и возможные проводимые эксперименты
- 5. Результаты эксперементальных исследований
- 6. Выводы
- Выводы
- Список источников
Введение
Физическая деятельность человека — одно из сложнейших и многогранных явлений материального мира. Она сложна потому, что очень непросты функции органов движения с позиции физики. Она многогранна и потому, что в ней участвует сознание как продукт наиболее организованной материи — мозга. В первую очередь речь идет об осознанной, целенаправленной активной деятельности человека, о понимании ее смысла, о возможности контролировать и планомерно совершенствовать свои движения. При помощи двигательной деятельности человек активно преобразует мир, свою собственную природу, самовыражается в физическом взаимодействии с окружающим миром, и в то же время физически совершенствуется. Из-за анатомических особенностей человеческого тела, оно все это время находится под постоянным вниманием и является предметом исследования многих научно-исследовательских институтов. Сегодня проводятся многие анатомические, физиологические, механические, экологические, социологические и психологические исследования, которые призваны помочь определить ключевые элементы и законы анатомического функционирования человеческого тела. Эти исследования используются, в попытках создать современные методы для оценки зависимости движения человека от многочисленных возможных его заболеваний.
1. Состояние Вопроса
Подвижность и характер физической деятельности, выполняемой человеком на протяжении жизни, оказывают большое влияние на состояние здоровья, на физическую функциональность, энергичность и жизненную силу человека. Физическая активность существенным образом влияет на качество жизни человека.
На уровень физичесой активности влияет много факторов, например такой фактор как социальный можно считать зависящим от того, как человек взаимодействует со своим ближайшим окружением и остальной частью сообщества. Среда, которая окружает его имеет большое влияние на то, каким образом человек выполняет движения (стиль, форма, количество движения). Например, если это городской или сельский житель, то живет он сам или в семье; какой тип работы (тяжелая или легкая, сам или в коллективе) и в каком количестве он выполняет и т.д., все это может способствовать определению типа его походки, вида траектории его перемещения.
Психологические и эмоциональные факторы влияют на движение человека, отражая эмоциональное и психологическое состояние каждого, например, удовлетворенность жизнью или ее отсутствие, хорошее благосостояние или ощущение его недостаточности, уверенность в себе и т.п. при нахождении в своем окружении [1].
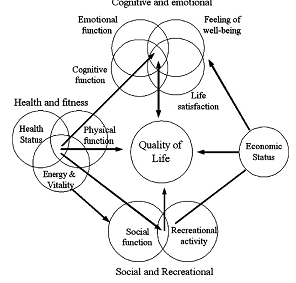
Рисунок 1 - Факторы, влияющие на качество жизни и здоровье человека[заимствовано из Godfrey et al.(2008)]
Рисунок 1 является хорошим представлением влияния интенсивности и типов движения на здоровье человека и почему важно поддерживать подвижный образ жизни.
Как видно из рисунка, все движения взаимосвязаны и потому нарушения от одного из них могут привести к цепной реакции проблем (Рисунок 2).
Именно в указанных областях функционирования человека идет комплексная работа ученных в инженерных, биологических и психологических сферах с целью получения необходимых знаний, в том каким образом люди проводят свою повседневную деятельность, и навыков, для контроля и поддержания здоровья человека при выполнении им этих мероприятий.
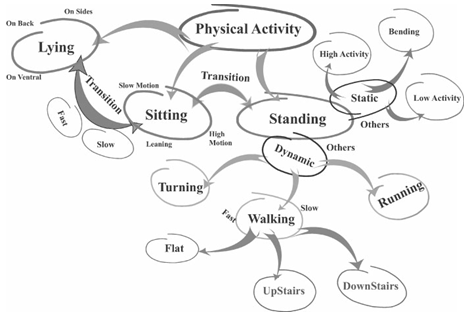
Рисунок 2 – Физическая деятельность человека [заимствовано из Godfrey et al. (2008)]
Одним из современных технических методов является прямое измерение движения с помощью акселерометра, который впервые был предложен в 1970-х годах, но при этом был достаточно усовершенствован только в последние 10-15 лет.
Прямое измерение с помощью акселерометра – это успешное введение в реализацию прибора малой мощности с низкой стоимостью датчиков, которые можно массово использовать в клинических и домашних условиях для постоянного и непрерывного мониторинга (контроля) пациентов по их подвижности и типу движений. Качественные иколичественные результаты (данные), предоставляемые этими датчиками, позволяют инженерам и врачам работать вместе, чтобы иметь возможность максимально повысить эффективность и скорость оказания помощи своим пациентам в преодолении их недугов [6].
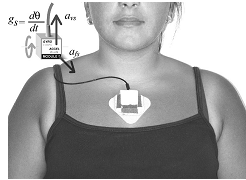
Рисунок 3. [заимствовано из Aminian et al.( 2003)]

Рисунок 4. [заимствовано из Aminian et al.(2004)]
Лидером в этой области количественного измерения параметров движения конечностей и всего тела является английская фирма Vicon, которая выпускает оборудование и специализированное программное обеспечение для маркерных оптических трехмерных систем захвата движения. Принцип действия системы основан на сочетании трехмерной визуализации с методом количественного анализа походки и электромиографией.
Технической базой для работы системы являются инфракрасные камеры, которые позволяют записывать движения со скоростью 200 кадров в секунду. Они получают информацию от специальных светоотражающих датчиков – маркеров, которые в определенной последовательности закрепляются на коже человека. Стоит сказать, что количество и месторасположения этих маркеров играет существенную роль в проведении самого исследования [7].

Рисунок 5 – Vicon.
Microsoft Kinect – технология распознавания движений человека, основанная на нескольких камерах и лазере. Примечательна тем, что для распознавания движений нужно лишь войти в зону видимости камер – никаких дополнительных контроллеров брать в руки не требуется. Некоторое время назад Kinect поставлялась только в виде периферийного устройства для приставки Microsoft Xbox 360, но сейчас уже написан SDK для использования компьютера, а Kinect потихоньку постепенно задействуется в различных сферах деятельности человека, в первую очередь используется в медицине и образовании [8].

Рисунок 6 – Microsoft Kinect
Компания Xsens является поставщиком систем 3D захвата движения на основе миниатюрного MEMS датчика (инерциальная сенсорная технология). Компания создала комплексный продукт в области мульти-сенсорных систем захвата движения. Продукт объединяет алгоритмы обработки данных, поступающих от надеваемых на тело сетей датчикоа и непосредственно сами инерциальные датчики в специальном исполнении. Продукция Xsens широко используется в области промышленности, развлекательной индустрии, для обучения и симуляции, для задач биомеханики [9].

Рисунок 7 – Xsens
2. Движение человека
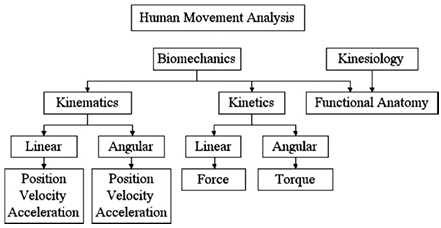
Рисунок 8 – Аспекты движения человека.
Изучение физических компонентов движения человека необходимо для полного понимания физиологических процессов человека и принятие правильного последующего лечения болезней и расстройств, связанных с движением человека [1].
Анализ движений человека проводится в общем в двух основных аспектах:
- Кинезиологический анализ
- Биомеханический анализ
При изучении различных аспектов движения обычно используют два подхода: качественный и количественный подходы.
Качественный подход заключается в том, что данные собираются со сравнительно небольшой группы экспертов и не анализируются при помощи статистики. Качественный подход анализа движения должен основываться на аналитике(или оборудовании), которая способна распознавать важные аспекты движения. Субъективные выводы, основанные именно этот на типе анализа, могут быть приняты или отклонены на основании количественных данных полученных в последующем.
Количественный подход, в свою очередь, это числовая оценка движения на основе данных, полученных во время анализа экспериментальных данных. Этот подход может опровергнуть субъективные мнения, описанные ранее, а также полученные данные могут описать или объяснить физическую ситуацию системы.
3. Особенности расположения акселерометров при измерении движения человека
Местоположение, в котором акселерометр помещают на тело, является важным фактором в измерении движения тела. Акселерометр обычно прикреплен к той части тела, движение которого изучается. Например, акселерометры, прикрепленные к лодыжке и голени, используются для изучения движения ног во время ходьбы, а акселерометры прикрепленные к запястью – используют при исследовании Тремора Паркинсона. Во многих случаях, когда необходимо изучить все телодвижения, для расположения акселерометра выбирают место как можно ближе к центру массы тела, например, грудь или талия.
Важным аспектом является точное расположение акселерометра относительно системы ориентации тела в пространстве, так как даже если их поместить нанекоторые жесткие (почти статичные) участки тела это может значительно повлиять на точность измерений.
Так же следует учитывать такие особенности как, например, что если датчик прикреплен слишком близко к центру вращения, амплитуда результирующего измеряющегося сигнала может быть ослаблена. В дополнение к этому, если использоватьдля ходьбы вспомогательные устройства (тростниковый или Zimmer кадр / ходок ) они могут значительно влиять на характер измеренных сигналов. Это может привести к полному ослаблению амплитуды сигнала на этапе измерения, а также увеличить колебание движений во времяамбулаторного движения.
4. Выбранные устройства для создания системы и возможные проводимые эксперименты
Для проведения исследований был взят цифровой акселерометр ADXL345, который представляет собой полную трехосевую систему измерения ускорения с выбираемым диапазоном измерения либо ±2g, ±4g, ±8g, или ±16g. Он измеряет как динамическое ускорение в результате движения или скачка и статического ускорения, например, силы тяжести, что позволяет использовать его в качестве датчика наклона.
Датчик представляет собой поликремниевую поверхность микромеханической структуры, построенная на вершине кремниевой пластины. Поликремниевые пружины приостанавливают структуру на поверхности пластины и обеспечивают устойчивость против силы ускорения.
Отклонение структуры измеряется с помощью дифференциальных конденсаторов, которые состоят из независимых фиксированных пластин и пластин, прикрепленных к движущейся массе. Ускорение отклоняет пучок и разбалансирует дифференциальный конденсатор, в результате чего получаем выходной датчика, амплитуда которого пропорциональна ускорению. Также используется фазочувствительная демодуляция для определения величины и полярности ускорения [3].
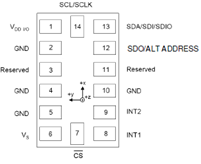
Рисунок 9 – Конфигурация выводов (вид сверху).
| Pin № | Название (аббревиатура) | Описание |
|---|---|---|
| 1 | VDD I/O | Цифровой вход напряжения питанияи |
| 2 | GND | Должен быть соединен с землей |
| 3 | Reserved | Подключается к VS или остается открытым |
| 4 | GND | Должен быть соединен с землей |
| 5 | GND | Должен быть соединен с землей |
| 6 | VS | Напряжение питания |
| 7 | CS | Выбор микросхемы |
| 8 | INT1 | Вихід переривання 1 |
| 9 | INT2 | Вихід переривання 2 |
| 10 | GND | Должен быть соединен с землей |
| 11 | Reserved | Подключается к GND или остается открытым |
| 12 | SDO/ALT ADDRESS | Последовательный вывод данных, заменяет I2C Address Select |
| 13 | SDA/SDI/SDIO | Последовательная передача данных (SPI 4-Wire), In/Out (SPI 3-Wire) |
| 14 | SCL/SCLK | Последовательная связь Clock |
Для того, чтобы получить систему, необходимо учесть несколько особенностей системы, которые будут рассмотрены далее. Также желательно программно организовать калибровку акселерометра, т.к. заводская калибровка зачастую бывает не достаточно точной [5].
Систему датчик ускорения ADXL345 – Микроконтроллер можно использовать для измерения движения любого сегмента человеческого тела, для этого достаточно закрепить систему в исследуемом сегменте, ориентируя акселерометры, чтобы его оси совпадали с осями системы ориентирования конечности в пространстве [4].
Изделие представляет собой печатную плату для 3-х осевого гироскопа L3GD20 фирмы ST, который измеряет вращение по осям X, Y, Z. Угловая скорость может быть измерена в любом из диапазонов ±250°/с, ±500°/с, или ±2000°/с. Измеренное значение угловой скорости может быть прочитано через I2C или SPI интерфейс [11].

Рисунок 10 – гироскоп L3GD20
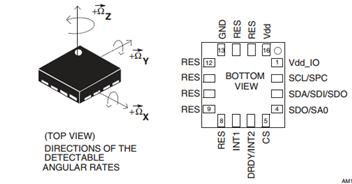
Рисунок 11 – Пин соединения
5. Результаты экспериментальных исследований
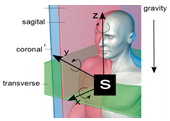
Рисунок 12 – Схема расположения датчиков на груди.
Рисунок 13 – схематично вставание и посадка с датчиком на груди.
анимация: 5 кадров, 5 циклов повторения, 8килобайт.
Рисунок 14 – фото, вставание и посадка с датчиком на груди
анимация: 5 кадров, 87 килобайт
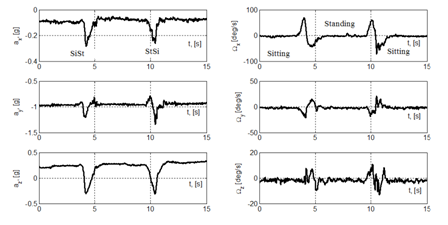
Рисунок 15 – График - Вставание посадка 1 раз
В задаче классификации сеть должна отнести каждое наблюдение к одному из нескольких классов (или, в более общем случае, оценить вероятность принадлежности наблюдения к каждому из классов). Классификацию можно осуществлять с помощью сетей следующих типов: многослойного персептрона, радиальной базисной функции, сети Кохонена, вероятностной нейронной сети и линейной сети и тд [10].
Для классификации были выбраны три положення: стоять,лежать лежать на боку. Чтобы выполнить нашу поставленную задачу – классифицировать эти три положения мы выполнили следующие действия:
- Система состоит из микроконтроллера, который принимает информацию от датчика по трем осям и выполняет передачу данных на компьютер в соответствии со схемой рисунок 2, добавляя время операции.

Рисунок 16 – Результаты экспериментальных исследований
- Солгласно полученным данным создаём script и строим следующие зависимости в пакете прикладних програм MATLAB.
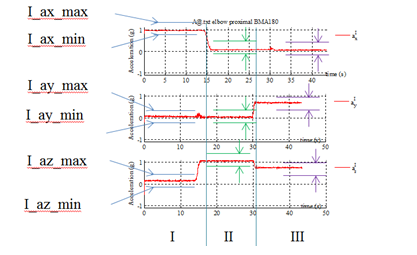
Рисунок 17 – Результаты экспериментальных исследований
Это график показывает нам три независимых и четко разделимых действий. Как мы видим первый (I) положение стоять и имеет значения X, близких к 1, Y = 0, Z = 0, второй (II), это горизонтальное положение с X около 0, Y около 0 и Z имеет значения примерно, равные 1. И третья (III) действий это горизонтальное положение на правой стороне.
Стрелками указан возможный диапазон отклонения человеческого тела в обычных(ровных) положениях. Он необходим для правильной классификации поз и построении логических правил.
- Далее организовываем логические правила основанные на булевой логике. И получаем следующие результаты:
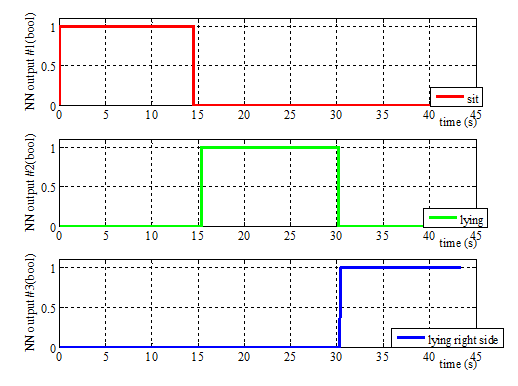
Рисунок 18 – Результаты экспериментальных исследований
- Следующим шагом является написание программы с использованием нейронной сети для классификации. В качестве классификатора был выбран многослойный перцептрон. Используя нашу обучающую выборку получаем.
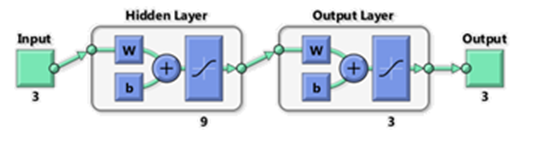
Рисунок 19 – Результаты экспериментальных исследований
Далее после получения нейронной сети, создаём программу в симулинк.И на выходе нейронной сети получаем соответствующие данные.
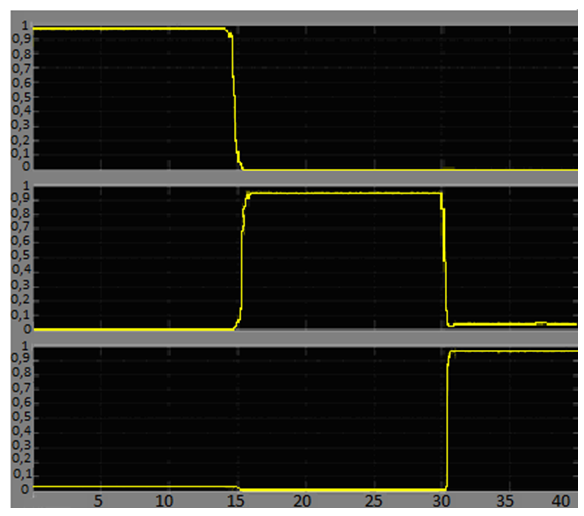
Рисунок 20 – Ответ нейронной сети. По оси У время, по оси Х ускорение [g]
6. Выводы
Движение человека является важным нейро-мышечным, скелетным событием, которое включает в себя механические, физиологические, анатомические, социологические, экологические и психологические факторы. Физиологические, механические и анатомические факторы, лежащие в основе, включают в себя многие аспекты, такие как плоскости движения, кинематика, биомеханика и т.д., которые нуждаются в тщательном анализе и получении количественной оценки для определения особенностей движения тела с целью эффективного лечения человека.
Измерение с помощью акселерометра зарекомендовало себя в качестве надлежащего и жизне способного метода определения движений различных групп.
С помощью этого метода более легкой реализация непрерывного измерения и контроля движения человека за счет его малой энергопотребности и миниатюрных габаритов.
Главным преимуществом такого метода является возможность работы в автономном режиме и при этом обработки данных в режиме реального времени.
В результате этого, измерения параметров движения на базе инерциальных датчиков позволили построить системы мониторинга, которые используютсравнительно неинтрузивные методы амбулаторной оценки движения, поз и осанки при ходьбе; расхода энергии, скорости и интенсивности движения.
Подобные системы можно создавать со специальными функциями, рассчитанными, например, для пожилых людей. Такие приборы более восприимчивы к шуму и плавности движения, которые изменяются с возрастом.
К настоящему моменту, из числа запланированных исследований, мною проведено:
- Проанализирован необходимый объем литературных источников с описанием существующих систем мониторинга активности человека.
- Разработано устройство для регистрации и передачи данных для последующих сохранения и обработки.
- Проведён ряд экспериментов направленный на количественное измерение параметров движения отдельных конечностей и тела человека.
- Реализованы программы обработки сигналов микроэлектромеханических датчиков и статистической обработки.
- Реализован алгоритм на базе многослойной нейронной сети с обученем методом обратного распространения ошибки для классификации сигналов.
Дальнейшие исследования направлены на следующие ключевые моменты:
- В работе с мониторингом дневной активности человека важным моментом является чёткое распознавание, разделение и классификация всех возможных положений человеческого тела. Поэтому совершенствование алгоритма классификации является первым пунктом в дальнейших исследованиях.
- Изучение всех активностей человека, включая все возможные постуральные переходы, промежуточные позиции а также различныхе нестандарные положения.
- Проведение серии экспериментов по измерению параметров движения человека для распространенных постуральных переходов, что позволит создать статистическую базы и опробовать разработанный прототип.
- Разработка критерия биоподобности траектории движения объекта по полученной с инерциального датчика информации. Данный притерий будет положен в основу выявления природы движущегося объекта и классификации по категориям движения гуманоидного робота / движения человека.
Технические задачи не являются научными, однако необходимо решить ряд технических вопросов.
- Трехосевой датчик ускорения позволяет исследователь значительную часть повседневной деятельности. Однако если датчик или сеть датчиков требуют использования многочисленных кабелей, которые располагаютсявдоль тела, то такое ношение значительно сокращает мобильность системы исследования (сковывает движения человека). Этот подход непрактичен для долгосрочного мониторинга и коммерческого использования. Поэтому наиболее эффективно развивать эту сферу в направлении беспроводной связи, повышения длительности автономной работы и миниатюризации что позволит сделать систему еще более совершенной.
- Повышение скорости обмена данными в системе, переход к 32битным архитектурам микроконтроллеров.
Замечание
Выражаю огромную благодарность всем, кто принимает участие в написании данной работы и проведении исследований.
На период написания данного реферата магистерская работа еще не завершена. Завершение работы – январь 2015 года. Более подробную информацию по этим исследованиям можно получить у автора, а полный текст и материалы работы – после завершения магистерской работы.
Список источников
- «Direct measurement of human movement by accelerometry», A. Godfrey, R. Conway a, D. Meagher, G. OLaighin; received 7 May 2008; received in revised form 25 September 2008; accepted 26 September 2008.
- «Triaxial Accelerometer Static Calibration», Kian Sek Tee, Member, IAENG, Mohammed Awad, Abbas Dehghani, David Moser, Saeed Zahedi; Proceedings of the World Congress on Engineering 2011 Vol III WCE 2011, July 6-8, 2011, London, U.K.
- «Datasheet ADXL345», 2008 Analog Devices, Inc. All rights reserved. Trademarks and registered trademarks are the property of their respective owners.
- Kreshchak R and Melnyk A., Capteur porte pour etude de la dynamique des mouvements de l’etre humain. Сучасні проблеми систем електропостачання та побутових об'єктів. Збірник наукових праць I Міжнародної науково-технічної конференції викладачів, аспірантів і студентів: 17-18 жовтня 2013 р., м. Донецьк: "ДВНЗ" ДонНТУ, 2013. С. 105-106.
- Khomenko V., Melnyk A., Henaff P., Kuzmin G., Borysenko V., (2013), Experiments in measurement of rhythmical movements of anthropomorphic robots or humans. Travaux scientifiques de l’Universite technique nationale de Donetsk. Наукові праці Донецького національного технічного університету 1 (14), 2013. 287–292.
- B. Najafi, K. Aminian, F. Loew, Y. Blanc, and P. Robert “Measurement of stand-sit and sit-stand transitions using a miniature gyroscope and its application in fall risk evaluation in the elderly” IEEE Trans. Biomed. Eng., vol. 49, pp. 843–851.
- Vicon[электронный ресурс]. - Режим доступа:http://www.vicon.com/http://www.vicon.com/
- Kinect for Widdows [электронный ресурс].- Режим доступа:http://www.microsoft.com/en-us/kinectforwindows/http://www.microsoft.com/en-us/kinectforwindows/
- Xsens [электронный ресурс]. - Режим доступа:http://www.xsens.com
- Statsoft [электронный ресурс]. - Режим доступа:http://www.statsoft.com/
- «Datasheet L3GD20», 2008 Analog Devices, Inc. All rights reserved. Trademarks and registered trademarks are the property of their respective owners.