Податливое управление роботами-манипуляторами, включающими датчик усилия и модели препятствий
Автор: R. P. Judd, C. W. Mousseau
Автор перевода: А.С. Жданов
Источник: American Control Conference, Seattle, WA, USA, 1986,
p. 689 - 694
Аннотация
R.P. Judd, C. W. Mousseau Податливое управление роботами-манипуляторами включающими датчик усилия и модели препятствий
В документе предлагается новая система управления роботом которая одновременно отслеживает сигналы, подаваемые датчиками положения и силы, вдоль препятствующей поверхности. Модель препятсвия добавляется в алгоритм управления. Это делает контроллер надежнее, чем те, которые разработаны ранее. Статья представляет общую модель для поверхностей препятствий и архитектуру для обратной связи контроллера. Если усилия смоделированы точно, контроллер способен следить с нулевой статической ошибкой.
Вступление
В теории, шесть осевых датчиков силы в сочетании с совместным энкодером предоставляют всю необходимую информацию для точного выполнения точных погрузочно-разгрузочных работ и монтажных задач. К сожалению, ни одна из существующих методик управления не может обрабатывать сигналы с датчика, чтобы обеспечить адекватную производительность.
Исследователями предложены различные способы податливого управления движением роботов-манипуляторов. Пол и Шимано [1] описали процедуру которая выбирает суставы для контроля силы или положения.
Крейг и Райберт предложили гибридный метод, который контролирует силу и положение в предопределенно ограниченном пространстве в декартовых координатах. Для сервопривода каждого звена, этот метод одпределяет управление из комбинации ошибок силы и положения. Матрицы выбора выбирают соответствующее ограничение для координаты силы или положения. Экспериментальные результаты были представлены для двухосевого манипулятора Шейнмана. Результаты показали, что метод имеет проблему отслеживания положения, во время регулирования силы.
Х. Ван Брюссель и Дж. Симонс [3] представили технику активной адаптации обратной связи по силе, которая использует специальный рабочий орган с пятью степенями свободы и заданной програмно податливостью с ограничением силы. Обратная связь по силе замкнута на манипуляторе, что разъединяет две проблемы.
Х. Одзаки, А. Мохри и Н. Taктa [4] представили метод, который преобразует обратную связь по силе во время перемещения и суммирует её с контролем положения.
Метод использованный в данной статье схож с [4], но также использует модели препятствующих поверхностей в системе управления, что приводит к более надёжной работе контроллера.
<р3>Метод моделирования
Структурная схема на Рисунке 1 даёт обзор отслеживания задания на силу и перемещение. Энкодер измеряет угловое перемещение звена, и датчик силы измеряет силу контакта рабочего органа. Модели препятствующих плоскостей и датчика силы используются вместе с измерениями на звеньях для расчёта силы и перемещения. Контроллер использует задание и измеренное значение состояния рабочего органа для выработки корректирующего перемещения звена робота. Далее обсуждаются элементы Рисунка 1.

Рисунок 1 – Структурная схема системы управления
Препятствующая поверхность и контакт рабочего органа
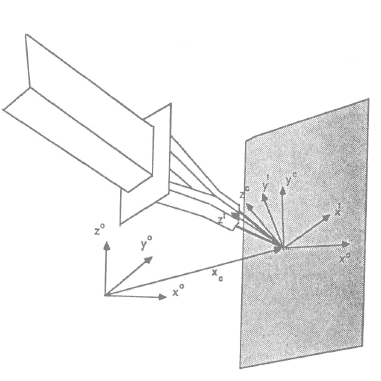
Рисунок 2 – Определения базисной системы координат и систем координат рабочего органа и препятствующей поверхности
Рассматриваем, что рабочий орган робота касается твёрдого объекта работы, показаного на Рисунке 2. Системы координат t и c относятся только к рабочему органу и ограничивающей поверхности в точке контакта. Матрица tАc преобразует величины векторов от системы координат препятствующей поверхности в систему координат рабочего органа.
Пепятствующая поверхность может быть разделена на нормальную и препятствующую [5]. Это разделение определяет степени свободы в которых контролируются сила и положение. Координаты нормальны к поверхности на которой контролируется усилие, в то время как они касательны к поверхности, в которой контролируется положение.
Модель препятствия
n-мерный вектор 0xt описывает положение и ориентацию рабочего органа относительно нуля координат. m препятствий предполагаются протяженными и однородными.

Где 0xc – Положение и ориентация из какой-либо точки на препятствующей поверхности к нулевой точке оси координат. Рисунок 2 показывает датчик силы касающийся препятствующей поверхности в xc. При условии отсутствия трения и движения датчика, положение рабочего органа относительно препятствующей поверхности может быть определено как минимум потенциальной энергии V системы

Где К – матрица упругости датчика силы и xr – позиция и ориентация запястья робота. Множитель Лагранжа p преобразует в форму V'
Минимизация V' даёт
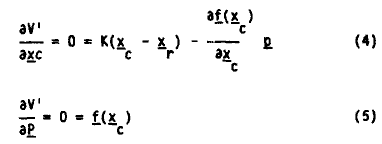
Уравнения 4 и 5 представляют проекцию рабочего органа на препятствующую поверхность.
Эти уравнения будут добавлены для представления общего типа препятствий. Примем, что препятствие имеет линейные зависимости среди переменных препятсвия с возможностью их представления. Например, в виде линий и плоскостей.
Где J – матрица mxn и b – вектор-строка длинной m.
Решая по xс
Заметим, что J должна иметь ранг m м К должна быть инверируемой.
Закон управления
Структурная схема на Рисунке 1 описывает как вычисляется контроль положения робота. Изменение усилия и положения необходимо чтобы робот выработал задание по уравнению
Где F – n мерная матрица представляющая обратную связь закона управления. сr – измеренные сила и положение crest – вычисленные сила и положение. Верхний индекс с показывает значение вектора в системе координат препятствующей поверхности. се теперь может быть трансформирована в эквивалентное перемещение с матрицей упругости датчика силы.
Где сК – матрица упругости датчика силы в оси координат препятствующей поверхности. В общем случае это увеличивает разнообразие движений робота. Это связано с матрицей tК матрицей упругости датчика силы в осях координат рабочего органа.
Заметим, что tК – матрица констант. Тогда (9) может быть переписано таким образом
Где S1 и S2 – матрицы выбора.
Где

Якобиан манипулятора Jr преобразует перемещение рабочего органа в перемещение манипулятора которое компенсирует ошибки силы и положения.

Подставив выражения (8) и (11) в (12) даёт конечную форму закона управления
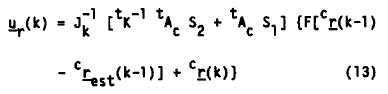
Которая может быть описано как форма RMRC контроля.
Вывод
Формулы описанные в статье могут быть использованы в любом роботе с n степенями свободы и с m препятствий. Методология была добавлена в двумерного робота в декартовых координатах с линейным препятствием. Динамикой робота пренебрегаем. Результаты симуляции показывают, что для идеального препятствия робот обводит препятствие с нулевой погрешностью как по усилию, так и по положению. Также, когда препятствие не было идеальным, робот следовал поверхности по преженему с удовлетворяющей стабильностью.
Сейчас методология развивается также для динамими датчика и робота. Симуляция должна быть развита для учитывания динамических режимов и чуствительности препятствия. Также адаптирующаяся схема управления, которая вычисляет препятствующую поверхность, должна быть исследована.
Методология на данный момент может быть продемонстрирована на примере робота, обводящего стилусом твердую препятствующую поверхность.
Литература
- Paul, Richard P.C., and Shimano, Bruce, 'Compliance and Control,' Proceedings of the 1976 Joint Automatic Control Conference, pp. 694-699.
- Craig, J. John, and Raibert, March, 'A Systematic Method of Hybrid Position/Force Control of a Manipulator,' 1979 IEEE Computer Software and ADDlications Conference.
- Van Brussel, H., and Simons, J., 'Robot Assetbly by Active Force Feedback Accomodation,' Manufacturina Technology: CIRP Annals, Vol. 28, No. 1, 1979, pp. 397401.
- Ozaki, Mohri H., and Takata, N., 'On the Force Feedback Control of a Manipulator with a Compliant Wrist Force Sensor,' Mechanism and Machine Theory, Vol. 18, No. 1, pp. 5742.
- Mason, M. T., 'Compliance and Force Control for Computer Controlled Manipulators," IEEE Trans. on Systems. Man, and Cybernetics, June 1981, pp. 418432.