




Реферат з теми випускної роботи
Зміст
- Введення
- 1. Актуальність теми
- 2. Мета і завдання дослідження, плановані результати
- 3. Огляд досліджень і розробок
- 3.1 Аналіз процесу водопостачання як об'єкта автоматичного управління
- 3.2 Огляд існуючих систем автоматичного управління для автоматизації водонапірного вузла. Напрямок удосконалення базової системи автоматичного управління
- 4. Моделювання вузла
- Висновки
- Список джерел
Введення
Водопровідні мережі міст України дуже часто складалися історично, шляхом розширення, по мірі приєднання нових житлових кварталів і промислових зон до міської території. Така практика не завжди враховувала можливості системи забезпечувати оптимальні параметри за видатками та тиску в магістральних і розподільних мережах. Досить часто у водопровідних схемах не враховувалися перепади відміток землі у межах розподільчої мережі, що створювало в деяких районах водопровідної мережі підвищений або недостатній тиск. Недостатній тиск призводить до зростання скарг споживачів, підвищений тиск призводить до зростання аварійних ситуацій, збільшення витоків і втрат води.
Завданням водопостачання є безперебійне постачання якісною водою споживачів за умови здійснення найбільшої зручності користування водою, при найменшій вартості її найбільшої простоті і заданої надійності експлуатації системи водопостачання.
Вирішити ці питання можна шляхом розробки нової та більш ефективної САУ водопостачання.
Актуальність теми
Підвищення енергоефективності управління водопостачанням є досить актуальною. Витрата води постійно зростає. Це пов’язано із зростанням населення в місті і підвищенням економічної активності. Тому в своїй роботі було вирішено мінімізувати ці витрати.
Мета і завдання дослідження, плановані результати
Метою даного курсового проекту є підвищення енергоефективності водонапірного вузла та зменшення часу його реакції на зміну навантаження за рахунок впровадження нової системи автоматизованого управління.
Для досягнення цієї мети САУ об'єкта [6] повинна виконувати наступні завдання [2]:
- Підтримувати тиск в загальному колекторі і трубопроводах до споживачів при непостійній навантаженні. У всіх трубах і насосах має бути однаковий тиск. Це необхідно для того, щоб вода не змінила свій напрямок руху, що може зупинити роботу всього вузла.
- Підтримувати задані параметри експлуатації обладнання вузла:
- – вихідний тиск – 6,5 ± 5% [Атм];
- – витрата води живить вузол утримувати в межах [900-1700] м3/добу;
- – рівні води в баках [3] – від 1 м до 9 м;
- – тиск і обороти насосів – 6,2-6,5 Атм;
- – контроль температури підшипників насосів (< 80 º C).
- – облік часу роботи насосів;
- – забезпечення рівномірного зносу;
Додаткові параметри:
- Мінімізувати енергоспоживання вузла.
- Забезпечувати автоматизоване і ручне управління обладнанням. Необхідно встановити елементи ручного та автоматичного керування обладнанням вузла з урахуванням сучасних вимог до ергономіки робочого місця оператора.
- Забезпечувати захисну функцію САУ (забезпечення безпеки роботи вузла):
- – сигнал про перевищення максимального рівня води в баку-накопичувачі і спустошенні нижче мінімального рівня;
- – сигналізація при виході тиску в загальному колекторі за допустимий діапазон;
- – сигналізація при перегріві насоса;
- – сигнал при різкому збільшенні споживання з різким падінням тиску, імовірний порив труби;
- – захоплення повітря насосом.
Усі аварійні ситуації повинні бути відображені на індикаторах щита управління і зобов'язані усуватися або автоматично, або за допомогою оператора.
3. Огляд досліджень і розробок
3.1 Аналіз процесу водопостачання як об'єкта автоматичного управління
Система водопостачання являє собою комплекс споруд для забезпечення певної групи споживачів (даного об'єкта) водою в необхідних кількостях і необхідної якості. Крім того, система водопостачання повинна мати певний ступінь надійності, тобто забезпечувати постачання споживачів водою без неприпустимого зниження встановлених показників своєї роботи у відношенні кількості або якості води, що подається (перерви або зниження подачі води або погіршення її якості в неприпустимих межах) [1].
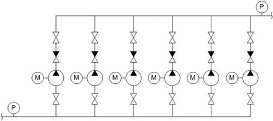
Розглянемо Мушкетівський водонапірний вузол як об'єкт управління. Водопровід – система безперервного водопостачання споживачів, призначена для проведення води для пиття і технічних цілей з одного місця в інше – до водокористувачеві (міські та заводських. Приміщення) переважно по підземних трубах або каналах.
З однієї загальної труби під тиском йде розподіл води в 6 допоміжних судин баків-накопичувачів, об’ємом 5 тис м3 кожен. Рівень води в баках обмежений lmax, lmin м;
Перед і після кожного бака-накопичувача знаходяться вентилі подачі води в ємності і виведення води з бака-накопичувача, які регулюють натиск рідини, що подається. З бака-накопичувача вода перекачується відцентровими насосами у водопровідну мережу до споживачів. Ці насоси створюють тиск у споживчому водонапірної мережі. Вода від насосів проходить через загальний колектор високого тиску і прямує в 4 вихідні труби. Потік до споживачів регулюється вентилями подачі води до споживачів.
Одночасно працюють максимально 3 насоса. 4-й – гарячий резерв (для введення насоса в експлуатацію достатньо натиснути кнопку. Він спочатку наповнений водою і готовий до роботи.
Вентиль запуску води в насос відкритий, а вентиль виведення води з насоса закритий). Тиск у насосах контролюється за допомогою датчиків тиску і змінюється за рахунок частотних перетворювачів.
Тиск у всіх трубах має бути однаковим, щоб уникнути перебоїв, тому датчики тиску розташовані на загальній трубі, загальному колекторі і на кожній трубі виведення води до споживачів.
Вентилі перерозподілу призначені для розподілу води між ємностями і насосами. За умови роботи тільки 1-го, третій і 4-го відцентрового насоса другий автоматично перекривається вентилями. Тоді вода надходить у відкриті насоси і безпосередньо в загальну розподільну трубу до споживачів. Таким чином, вода з будь-якої бажаної ємності потрапляє до споживача через працездатний насос.
вентиль управляє спеціальний виконавчий механізм. Дані з нього надходять на блок управління. Дані з датчиків і витратомірів надходять на блок вимірювань.
3.2 Огляд існуючих систем автоматичного управління для автоматизації водонапірного вузла. Напрямок удосконалення базової системи автоматичного управління
В даний час існує безліч аналогів донної системи. Одним з таких є система автоматизації WILO-MPS для насосів водопостачання. На малюнку 2 представлена її технологічна схема
Малюнок 2 – Технологічна схема WILO–MPS
Застосування:
Система автоматизації WILO- MPS [4] створена за технологією автоматизації насосів для систем водопостачання та опалення з кількістю насосів від 1 до 6 в діапазоні потужностей електродвигунів насосів від 1 до 630 кВт, напругою в мережі 380 В.
Рекомендується використовувати для автоматичного підйому і циркуляції води:
- – Станції першого підйому, Водозабори і водозабірні вузли ( ВЗУ)
- – Станції другого, третього, четвертого підйому
- – Підвищувальні насосні станції (ПНС)
- – Водонапірні насосні станції ( ВНС)
- – Мережеві насоси та насосні групи
- – Насосні станції теплопостачання і циркуляції
Таблиця 1 Технічні характеристики
| Тип регулювання станції | Підтримання тиску, витрати, або їх перепаду |
| Кількість насосів | Від 1 до 6 (більше за спеціальним замовленням) |
| Токи | від 3 А до 1120 А (більше за спеціальним замовленням) |
| Потужність | від 1 кВт до 630 кВт (понад за спеціальним замовленням) |
| Електропостачання відповідно до ГОСТ 13109-97 | 380 В ± 10%, 50 Гц ± 0.2; |
| Коефіцієнт спотворення синусоидальности | Kui не більше 8.0; |
| Діапазон флуктуації частоти | +/- 5%; |
| Ступінь спотворень робочої напруги | =3; |
| Вимоги по ЕМС згідно МЕК 60947–1 – ступінь жорсткості | 3; |
| Температура навколишнього середовища | 0..+40 С |
| Ступінь захисту IP | 54 |
| Тип підключаються аналогових датчиків | 4-20 мА (пасивний) |
| Тип датчиків, що підключаються захисту насоса | Термістор РТС, РТ 100, біметал, 1 аналоговий датчик вібрації (4..20 мА), 1 дискретний датчик додаткового захисту |
| Тип підключаються дискретних сигналів | Сухий контакт |
| Тип вихідних дискретних сигналів шафи управління | Сухий контактmax 220 В, 5 А |
| Максимальна відстань до датчиків, що підключаються | 200 м |
| Перетин підключаються проводів до датчиків | не менше 0,75 кв. мм |
| Макс. довжина кабелю від шафи управління до кінцевого шафи силової комутації | 200 м |
| Макс. довжина кабелю до двигуна без вихідної дроселя | 50 м екранований, 100 м неекранований |
| Макс. довжина кабелю до двигуна з вихідним дроселем | 150 м екранований, 250 м неекранований |
| Підтримувані протоколи обміну даними | Industrial Еthernet, Modbus, Lonworks, Industrial Ethernet ч/з ADSL, Modbus ч/з GPRS, Profibus |
| Монтаж силових і сигнальних кабелів здійснити в різних лотках, або в одному лотку з металевою перегородкою | |
4. Моделювання вузла
Контроль рівня води в баках.
Розрахунок коефіцієнта регулюючого органу:

Рівняння рівня води в баках-накопичувачах:


Де S_сеч – площа поперечного перерізу бака-накопичувача.
Розрахунок передавальної функції виконавчого механізму:
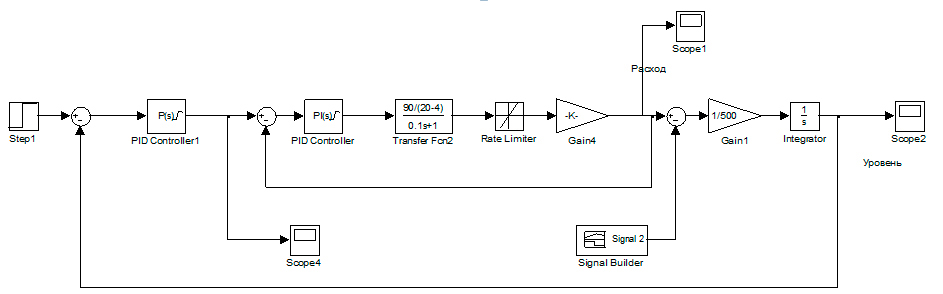
Малюнок 3 – Імітаційна модель рівня води в баку-накопичувачі
При розробці регулятора можна використовувати методику вибору параметрів на основі перетворення Мебіуса [5].
Результати моделювання представлені на малюнку 4:
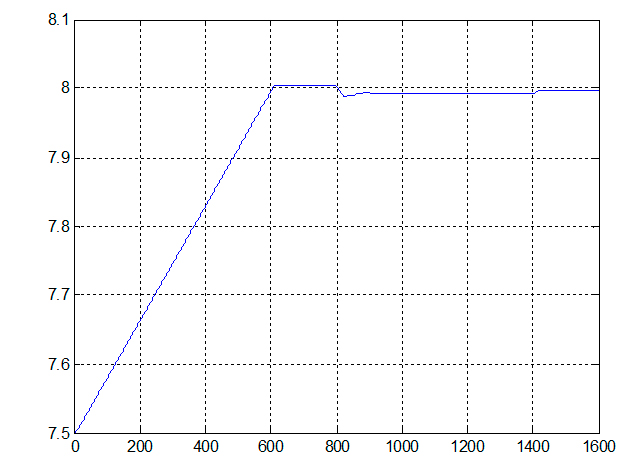
Малюнок 4 – Рівень води в баку-накопичувачі
На малюнку 4 видно, що в системі присутня помилка регулювання, проте вона входить в допустима межа похибки.
Контроль тиску в трубопроводі.
Складання математичної моделі насоса:
Згідно обраної моделі насоса [7], представимо його характеристики:
Нас цікавить залежність витрати Q, [м3/ч] від потужності N, [кВт]. Уявімо цю залежність у вигляді масиву чисел:
N = [270,300,310,380,400,450,510], кВт
Q = [0,200,450,800,1000,1400,2000], м3/ч
Таблиця 2 – Параметри асинхронного двигуна АІР802А [8]
| Номинальная мощность | Pn=3*746 (ВА), |
| действующее линейное напряжение | Un=220 (В) |
| номинальнаячастота | fn=60 (Гц) |
| сопротивление статора | Rs =0.435 (Ом) |
| индуктивность статора | Ls=2.0е–3 (Гн) |
| сопротивление ротора | Rs=0.86 (Ом) |
| индуктивность ротора | Ls=2.0е–3 (Гн) |
| взаимная индуктивность | 69.31е–3 (Гн) |
| момент инерции | J=0.089 (кг*м^2) |
| коэффициент трения | F=0 (Н*м*с) |
| число пар полюсов | p=2 |
На малюнках 5 і 6 представлені моделі в Simulink
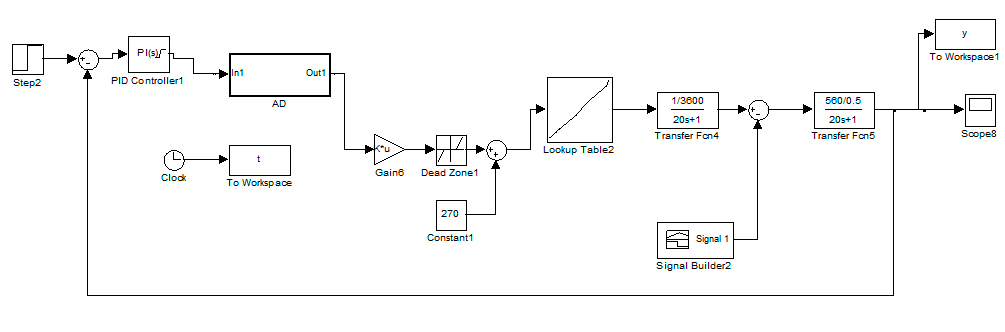
Малюнок 5 – Імітаційна модель підтримки тиску в загальному колекторі
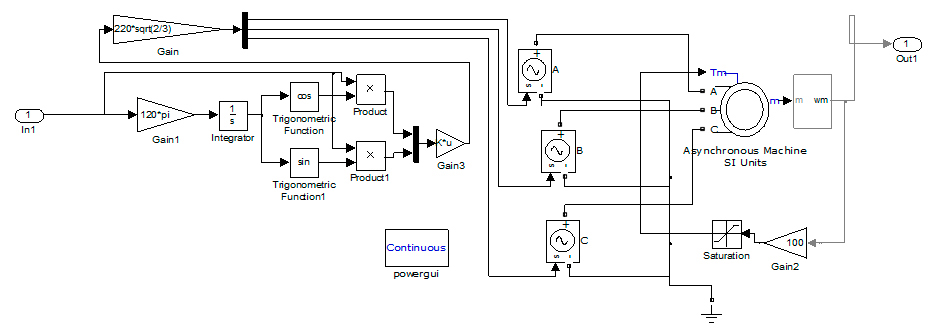
Малюнок 6 – Імітаційна модель асинхронного двигуна АІР80
Результат моделювання представлені на малюнку 7:
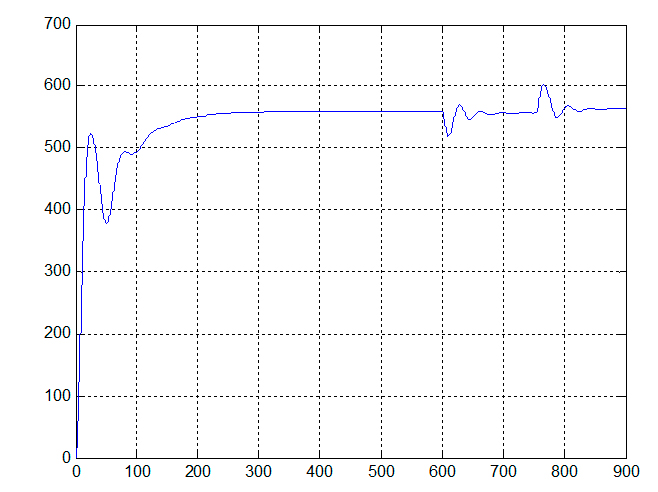
Малюнок 7 – Перехідний процес тиску
Враховуючи задане в умовах значення тиску р=560 кПа, можна зробити висновок, що система змодельована вірно.
Висновки
Була спроектована САУ процесу водопостачання [9]. САУ ефективно вирішує поставлені перед нею завдання. Аналіз САУ показав, що розроблена система ефективніше і дешевше у створенні, ніж використання вже готових варіантів від лідируючих компаній.
Наступні математичні моделі були зібрані і промодельовані в середовищі Matlab Simulink [10]:
- - модель контролю рівня води в баках-накопичувачах;
- - модель підтримки постійного тиску в загальному колекторі при непостійній навантаженні.
Були отримані і проаналізовані перехідні процеси даних моделей.
За результатами поточного проекту можна більш детально вивчити сильні та слабкі сторони отриманої САУ для подальшого удосконалення системи, усунення недоліків і поліпшення ефективності системи.
Список використаної літератури
- Наказ Міністерства житлово-комунального господарства від 06.09.10 р. № 316
Щодо розроблення схем оптімізації роботи централізованіх систем водопостачання населених пунктів України
. - Наказ Міністерства ЖКГ від 23.12.10 р № 476
Про погодження Методичних рекомендацій з розроблення схем оптімізації роботи систем централізованого водопостачання та водовідведення
. - І. В. Кожинов Усунення втрат води при експлуатації систем водопостачання/ І. В. Кожинов, Р. Г. Добровольський / 2-е вид., Перераб. і доп. – М: Стойіздат, 1988 р. – 348 с.
- Сайт компанії WILO–MPS: http://www.wilo-mps.ru/ .
- Науковi працi Донецького Нацiональне технiчного унiверситету.
Про вибір параметрів перетворення Мебіуса при конструюванні стабілізуючих регуляторів
, А. В. Хорхордін, С. С. Батир, А. А. Безрук - Автоматизація систем водопостачання і водовідведення, А. А. Рульная, К. Ю. Євстаф'єв, видавництво:
Инфра–М
, 2010 р. – 208 с. - Електронний каталог насосів: http://www.uptc.ru/category/view/id/1.html.
- Автоматизація контролю параметрів і діагностика асинхронних двигунів, О. Д. Гольдберг, І. М. Абдуллаєв, А. Н. Абієв, видавництво: Вища школа, 1991 р. – 160 с.
- Автоматизація систем водопостачання і водовідведення, Г. С. Попковіч, М. А. Гордєєв, видавництво:
Вища школа
, 1986 р. – 392 с. - Моделювання процесів і систем в MATLAB, Ю. Лазарєв, видавнича група BHV, 2005. – 512 с.
