УДК 004.896+681.3
Разработка мобильного робота с реализацией визуального обхода препятствий
С.С. Михнев
Национальный авиационный университет
kvp@nau.edu.ua
Рассмотрена обобщенная структура модели информационного обмена автономного мобильного робота и внешней среды. Предложен способ уменьшения неопределенности входных данных при формировании траектории перемещения робота за счет использования верификации ориентиров на базе ВИЗА-данных и геометрического моделирования объектов-ориентиров.
Современные интеллектуальные системы управления автономными мобильными роботами (АМР) должны обладать средствами планирования поведения с учетом неопределенностей входной информации, которые возникают в ходе информационного обмена АМР с внешней средой.
На рис. 1 приведена обобщенная модифицированная структура информационной модели системы управления АМР, которая разработана на базе структуры модели приведенной в [1].
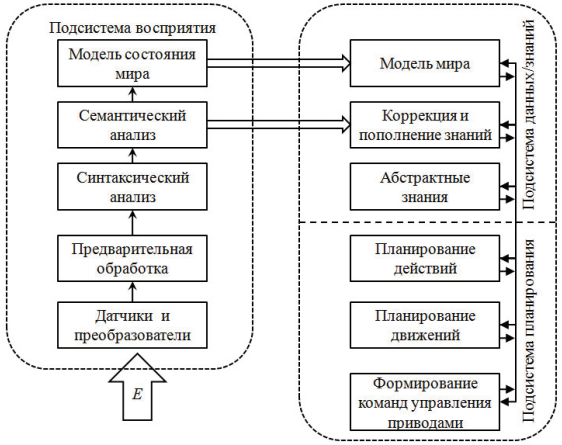
Рисунок 1 – Обобщенная структура модели информационного обмена автономного мобильного робота и внешней среды
Одним из источников неопределенности является незнакомый рельеф при передвижении АМР по пересеченной местности. Для решения задачи прохождения из точки в точку с наименьшими потерями при условии выполнения миссии, необходимо обеспечить возможность уменьшения неопределенности за счет способности ориентироваться на местности по ориентирам, описанным в априорной модели внешней среды (мира) АМР.
В работе [2] предложено хранить информацию об объектах реального мира с помощью векторного информативно-значимого ассоциативного (ВИЗА-данные) представления информации об объектах. На данном этапе развития представление должно включать следующий минимальный набор атрибутов для объекта-ориентира описывающего реальный объект в априорной модели мира:
- уникальный идентификатор объекта (в пределах загружаемого участка реального мира);
- координаты условного центроида объекта (Xс,Yc) в декартовой системе координат;
- вектор точек в локальной полярной системе координат определяющий вершины объекта, который должен содержать количество точек достаточное для восстановления проекции по заданному методу проецирования;
- набор ассоциативных данных (название, характеристики) в формате «ключ>значение»;
- набор ассоциативных данных в формате «ключ>значение» для определения типа данных характеристики объекта.
Перед выполнением задачи мобильным роботом, априорная модель мира содержит начальные версии объектов-ориентиров на карте. По ходу выполнения миссии или движения вдоль траектории спроектированной в блоке стратегического планирования происходит верификация основных объектов-ориентиров с выполнением классификации и относительной привязкой объектов отсутствующих в модели мира к объектам-ориентирам. Новые объекты помещаются в базу «приобретенных» объектов
Верификация ориентиров и корректировка нового маршрута содержит следующие этапы:
- фотографирование предполагаемого объекта ориентира;
- предварительная обработка изображения (применение фильтров и выделение контуров);
- моделирование на базе ВИЗА-данных с помощью объектно- ориентированного подхода контура объекта-ориентира с использованием методов геометрического моделирования[3];
- идентификация и сопоставление полученного изображения с образом, полученным в результате моделирования;
- уточнение, в случае неполного соответствия на базе нейросетевых технологий;
- оценка рисков, с учетом уточненной информации;
- проверка необходимости расчета новой оценки оптимальности маршрута;
- многокритериальная оценка оптимальности (при необходимости) с помощью аппарата генетических алгоритмов;
- подтверждение рассчитанного маршрута, либо выбор вновь рассчитанного.
Для выполнения поставленных задач управляющая система АМР должна содержать блоки геометрического моделирования, нейросетевые блоки распознавания и уточнения, блоки нечеткой оценки, блоки многокритериальной оптимизации на базе генетических алгоритмов. Все блоки должны обмениваться данными в унифицированном формате на базе ВИЗА-данных по единой информационной шине.
В ходе дальнейших исследований планируется разработать критерии информативной значимости и провести оценку достаточного количества данных для геометрического моделирования объекта- ориентира и дать формальное описание формата представления ВИЗ
Список литературы
- Гаврилов А.В. Системы искусственного интеллекта./А.В. Гаврилов // – Новосибирск: Изд-во НГТУ, 2001 – Ч.1. – 67 с.
- Квасніков В.П. Структура інтелектуальної системи управління мобільним роботом з верифікацією орієнтирів / В.П. Квасніков, С.С. Міхнєв // Збірник наукових праць Військового інституту Київського національного університету імені Тараса Шевченка. – 2011. – № 32. – С. 33 – 37.
- Голованов Н.Н. Геометрическое моделирование/ Н.Н. Голованов // - М.:Издательство Физико-математической литературы, 2002. – 472 с. Получено 10.07.2011