
Реферат
ВСТУП
У клінічній практиці черепно-челюсно-лицьового хірурга постійно виникає потреба у точній та об'єктивній інформації щодо структури, форми та розмірах твердих та м'яких тканин пацієнтів. Це необхідно для оцінки конкретної ситуації, планування і підготовки майбутньої операції. Для збору і обробки діагностичної інформації в даний час використовують рентгенографію, ангіографію, ультразвук, комп'ютерну та / або магнітно-резонансну томографію, а також відеограмметріческіе вимірювання (стереоскопічний зйомка). Кожен з цих методів вимагає спеціальних знань для правильної інтерпретації отриманої інформації. Однак, навіть досвідчений хірург змушений користуватися своєю уявою для того, щоб на основі комп'ютерного зображення або рентгенівських знімків уявити собі цілісну картину патології та прийняти правильне рішення. Тому важливим є питання перетворення діагностичної інформації в більш зручні форми сприйняття з точки зору людини.
Також в останні роки активно впроваджуються нові технології швидкого прототипування. Стереолітографія – одна з найбільш популярних. Ця технологія являє собою пошарове виготовлення пластикової копії об'єкта по його комп'ютерного образу. Застосування даної технології в медицині грунтується на отриманні тривимірної цифрової моделі об'єкта, використовуючи дані комп'ютерної або магнітно-резонансної томографії. [1]
Рисунок 1 – Знимки СКТ (анімація: 7 кадрів, циклів повторення – 12, час між кадрами – 1с., розмір 183 Кб)
АКТУАЛЬНІСТЬ ТЕМИ
Лікування травм щелепно-лицевої ділянки, а також діагностика та реабілітація залишається однією з актуальних задач щелепно-лицевої хірургії. Згідно зі статистикою, постраждалі від травм щелепно-лицевої ділянки складають близько 25% всіх пацієнтів щелепно-лицьового профілю. Спостерігається збільшення числа важких пошкоджень кісток лицьового скелета, досить високим залишається відсоток ускладнень – до 15-25%. [2] Очевидно, що можливість отримання пластикових моделей областей, що цікавлять хірурга, на яких планується операція, була б дуже корисна.
МЕТА І ЗАВДАННЯ ДОСЛІДЖЕННЯ
Метою даної роботи є проектування системи підтримки прийняття рішень (СППР) для побудови тривимірної моделі щелепно-лицевої ділянки на підставі даних СКТ і визначення точок кріплення імплантату-кріплення при переломах.
Результати роботи СППР спрямовані на усунення недоліків існуючих подібних систем, допомога лікарю при підготовці до операції імплантації, шляхом надання йому інформації про можливі точки кріплення імплантату.
Планується вирішити наступні завдання:
- загальний аналіз предмету дослідження і постановка задачі;
- огляд і аналіз існуючих систем і розробок, пов'язаних з обробкою зображень щелепно-лицевої ділянки;
- огляд, аналіз та вибір методів обробки зображень;
- аналіз і розробка підходів до визначення оптимальних точок кріплення імплантату;
- аналіз, вибір і розробка методів побудови тривимірної моделі;
- розробка структури СППР, визначення її підсистем і функціональних вузлів;
- вибір засобів та технологій розробки системи відповідно поставленим завданням і обраним методам;
- створення СППР та її апробація в реальних умовах;
- аналіз результатів апробації СППР.
Об'єктом дослідження є процес імплантації в щелепно-лицевої хірургії.
Предметом дослідження є визначення параметрів і місця кріплення імплантату щелепно-лицевої хірургії.
АНАЛІЗ РОБІТ
1. Глобальний огляд
1.1 Програмне забезпечення Planmeca Romexis
Дана програма зручна для користувача, легко засвоюється при практичній роботі. Програмне забезпечення Planmeca Romexis написано на мові програмування Java. Це дозволяє йому працювати в різних операційних системах (рисунок 2).
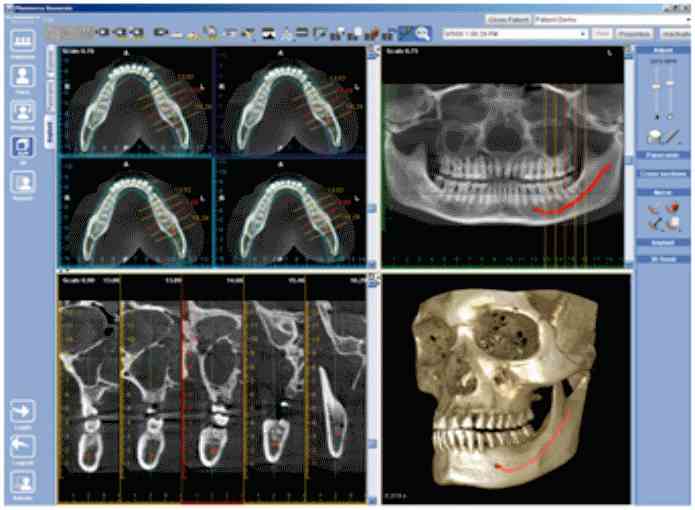
Рисунок 2 – Програмне забезпечення Planmeca Romexis
Особливості Planmeca Romexis
Великою перевагою роботи з Planmeca Promax є те, що тривимірні знімки, які отримані з використання даного ПЗ, можуть бути розглянуті з різних проекцій. Також вони можуть повертатися, змінювати масштаб і розрізатися на шари. Planmeca Romexis повністю сумісним зі стандартом медичних знімків DICOM, і може зберігати результати в цьому стандарті. Результати досліджень можуть записуватися безпосередньо на компакт-диск або на USB носій, наприклад, для передачі консультуючи лікаря. [5]
Основними недоліками програмного продукту є:
- немає можливості здійснювати випуск ZPR файлів, підготовлених для друку на 3D принтерах Z Corp;
- робота тільки з файлами отриманими на обладнанні Planmeca Romexis;
- неможливо виділити частину об'єкта;
- відсутність російськомовного інтерфейсу.
1.2 Програмне забезпечення OSIRIX
Програмне забезпечення OSIRIX відповідає стандарту DICOM для зв'язку з протоколами і форматами зображень. Воно було спеціально розроблено для аналізу і візуалізації багатовимірних зображень. Це програмне забезпечення включає в себе 2D і 3D переглядач, 4D переглядач (серії 3D знімків з тимчасовими вимірами, наприклад: кардіо-КТ) і 5D переглядач (серії 3D знімків з тимчасовими і функціональними вимірами, наприклад: Кардіо-PET-КТ).
3D переглядач надає можливості рендеринга поверхні, рендеринга об'єму, а також мультипланарної реконструкції (МПР) і проекції максимальної інтенсивності (ПМВ). [7]
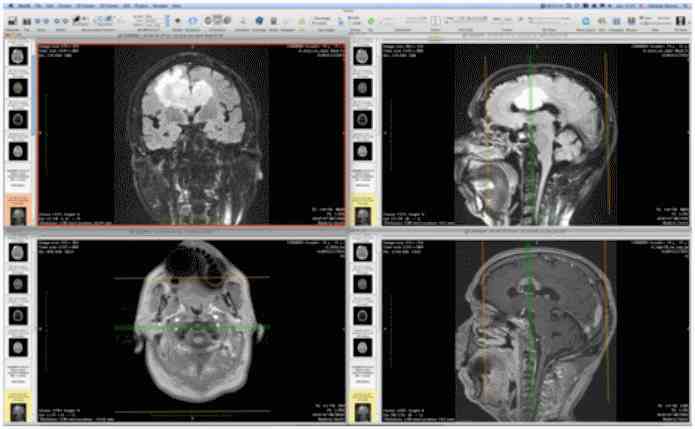
Рисунок 3 – Програмне забезпечення OSIRIX
Основними недоліками програмного продукту є:
- вартість програмного забезпечення;
- робота тільки на операційних системах Mac і iOS;
- відсутність російськомовного інтерфейсу.
1.3 Програмне забезпечення Mimics Materialise
Mimics – це програмне забезпечення, що використовується для реконструкції структури людського тіла або його частин. Грунтуючись на двомірних знімках, отриманих за допомогою комп'ютерної томографії або обладнання магніто-резонансної томографії ця програма генерує тривимірну модель відповідно до ділянкою людського тіла. Після створення тривимірної DICOM моделі, програма дозволяє створити і STL-файл моделі. [8]
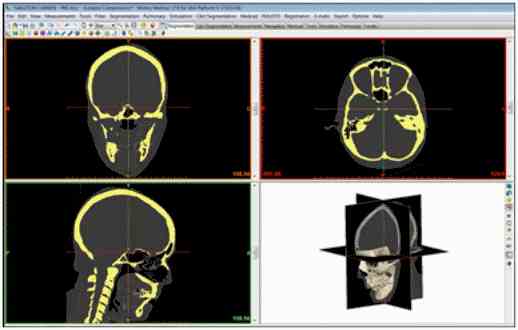
Рисунок 4 – Програмне забезпечення Mimics Materialise
Основними недоліками програмного продукту є:
- робота тільки з файлами отриманими на обладнанні Materialise;
- вартість програмного забезпечення.
2. Національний огляд
На даний момент в Україні було розроблено, за замовленням хірургів-стоматологів, програмне забезпечення під назвою KORONIDA. Ця програма призначена для виявлення і зберігання даних про пошкодження тільки щелепно-лицевої ділянки, надалі є можливість зберігати всі етапи лікування. Система KORONIDA є конструктором, за допомогою якого користувач може виявити і виділити на зображенні область інтересу. Дані в системі представлені у вигляді ланцюжка документів, що відображають всі етапи обробки. Система передбачена для роботи як одного користувача з локального комп'ютера, так і для одночасної роботи безлічі користувачів в локальній мережі. [6]
3. Локальний огляд
Серед магістерських робіт ДонНТУ можна виділити роботу Толстих А.Л. "Розробка СКС визначення морфологічних змін при остеосинтезі щелепи". У цій роботі описана розробка спеціалізованої комп'ютерної системи, яка спрямована на вирішення задач, розглянутих вище. Зовнішній вигляд системи наведено на рисунку 5.
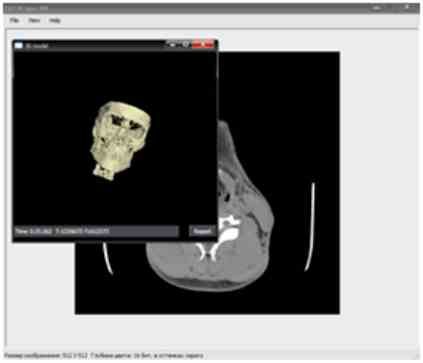
Рисунок 5 – Зовнішній вигляд програмного забезпечення
Переваги розробленої системи:
- Побудова тривимірної моделі щелепно-лицьової області.
- Виявлення і визначення наявності перелому в зазначеному місці.
- Визначення ширини і висоти кістки в місці перелому.
- Аналіз і перегляд тегів DICOM зображення.
- Висновок результатів обстеження в зрозумілій для лікаря формі.
Недолік розробленої СКС: Проводиться побудова моделі всього черепа, а не конкретної ділянки перелому. У цьому випадку побудова вимагає більше часу і модель виходить менш деталізованою. Не самий кращій варіант виявлення кордонів поверхні.
ПОБУДОВА 3D МОДЕЛІ
Однією з задач, які вирішуються в магістерській роботі є побудова тривимірної моделі за даними СКТ. Для вирішення цього завдання був обран алгоритм "маршируючі куби". [4]
Цей алгоритм виробляє розбиття області простору, що містить вихідну поверхню, на кубічні комірки і аппроксимує перетин вихідної поверхні і кожної кубічної комірки розбиття трикутниками. Для випадку синтезу зображення за плоскими перетинами вершинами кожного куба будуть по чотири точки на парі сусідніх перетинів (на кожному перетині вершини утворюють квадрат), розташовані як би один над одним (рисунок 6).
Умовно процес побудови тривимірної моделі можна розбити на два етапи:
- Розбиття області G простору R3 на кінцеве безліч осередків, пошук осередків, що перетинаються шуканої поверхнею.
- Апроксимація поверхні в знайдених осередках. [4]
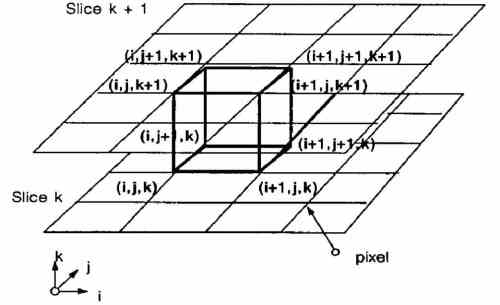
Рисунок 6 – Маршируючі куби
Алгоритм визначає, як поверхня перетинає цей куб, потім переміщається (або марширує) до наступного кубу. Щоб знайти поверхневий перетин в кубі, присвоюється одиниця вершині куба, якщо значення даних в цій вершині перевищує (або дорівнює) значенням поверхні, яка будується. Ці вершини знаходяться всередині (або на) поверхні. Вершини куба зі значеннями нижче поверхні отримують нульове значення і знаходяться поза поверхні. Поверхня перетинає ребра куба, де одна вершина знаходиться поза поверхнею (один), а інша знаходиться всередині поверхні (нуль).
Оскільки існує вісім вершин в кожному кубі і два можливих значення, всередині і зовні, є тільки 28 = 256 способів з якими поверхня може перетинатися з кубом. Однак, використовуючи симетрію і обертання, ці способи можна звести до 15, представлених на рисунку 7.

Рисунок 7 – Тріангульовані куби
Найпростіший випадок, під номером 0, має місце, коли всі значення вершин вище (або нижче) цього значення, і не утворює трикутників. Наступний зразок, під номером 1, має місце, коли поверхню відокремлює від вершини інші сім вершин, в результаті чого виходить один трикутник, утворений трьома крайовими перетинами. Інші випадки утворюють кілька трикутників. Перестановка цих 14 основних моделей з використанням компліментарної і осьової симетрії утворює 256 випадків.
Для кожного конкретного випадку, виходячи зі стану вершини, створюється індекс. З використанням нумерації вершин на рисунку 8, виходить восьмибітний індекс, що містить один біт для кожної вершини.
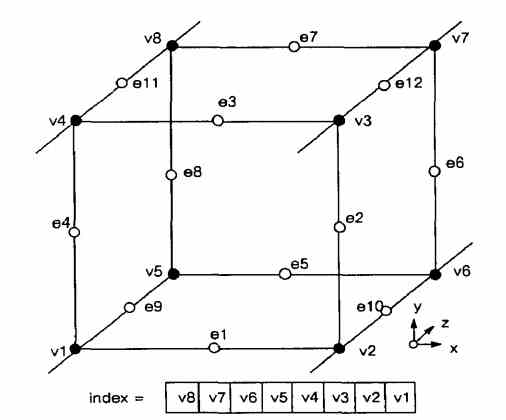
Рисунок 8 – Нумерація куба
Цей показник слугує показником в таблиці, яка дає всі області перетину для даної конфігурації куба. Використовуючи даний індекс, можна сказати який край перетинає поверхню, можна інтерполювати поверхню перетину уздовж краю.
Останнім кроком в алгоритмі маршируючих кубів є обчислення одиничної нормалі для кожної вершини трикутника. Поверхня постійної щільності має нульовий градієнт вздовж поверхні в тангенціальному напрямку; отже, напрямок вектора градієнта g нормально розташован до поверхні. Можна використовувати цей факт для визначення вектора n нормалі площини, якщо величина градієнта, | g | відмінна від нуля. На щастя, на поверхні між двома типами тканин різної щільності, градієнт вектора дорівнює нулю. Вектор градієнта, g, є похідною від функції щільності.

Для оцінки вектора градієнта на поверхні, спочатку оцінюється вектор градієнта в вершині куба і лінійно інтерполюється градієнт в точці перетину. Градієнт в вершині куба (i, j, k), оцінюється за допомогою центральних різниць уздовж трьох осей координат:
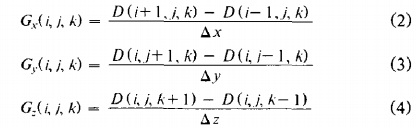 ,
,
де D (i, j, k) є щільність на пікселя (i, j) в зрізі k, а Ax, Ay, Az є довжинами ребер куба. Розділивши градієнт на довжину виходить одинична нормаль в вершині, необхідної для відтворення. Далі використовують лінійну інтерполяцію цієї нормалі до точки перетину.
Таким чином, маршируючі куби будують поверхню з тривимірного набору даних в такий спосіб:
- Зчитування чотирьох зрізів в пам'ять.
- Сканування двох зрізів і створення куба з чотирьох сусідніх на одному зрізі і з чотирьох сусідів на наступному зрізі.
- Обчислення індексу для куба шляхом порівняння значень щільності восьми вершин куба зі значеннями поверхні.
- Використовуючи індекс, щоб переглянути ребра з таблиці.
- Пошук області перетину поверхні за допомогою лінійної інтерполяції з використанням щільності в кожній вершині.
- Обчислення одиничної нормалі в кожній вершині куба з використанням центральних різниць. Інтерполяція нормалі до кожної вершині трикутника.
- Побудова вершин трикутника і нормалей вершин. [3]
ВИСНОВОК
У даній роботі були зібрані і вивчені матеріали з питань, пов'язаних з темою магістерської роботи.
Були виділені завдання, які планується вирішити в магістерській роботі, розглянуті аналогічні роботи за даної темою та виявлені переваги та недоліки існуючих інструментальних засобів для побудови тривимірної моделі щелепно-лицьової області. Був розглянут алгоритм побудови тривимірної моделі на підставі знімків СКТ – алгоритм "маршируючі куби".
На підставі результату аналізу було вибрано напрямок власних досліджень в області побудови тривимірних моделей імплантату і пошуку оптимальних параметрів кріплення при переломах нижньої щелепи.
ЗАУВАЖЕННЯ
На момент написання даного реферату магістерська робота ще не завершена. Очікувана дата завершення: травень 2017 р. Повний текст роботи, а також матеріали за темою можуть бути отримані у автора або його керівника після зазначеної дати.
ДЖЕРЕЛА
- А.Л. Іванов. Використання методів комп'ютерного і стереолітографічного біомоделювання в дитячій щелепно-лицевої хірургії, Москва, 2003, 14.00.21, 151с.
- Д.К. Калиновський, І.Н.Матрос-Таранець. Сучасні підходи в діагностиці, лікуванні та реабілітації травм щелепно-лицевої ділянки з використанням комп'ютерних технологій і телемедицини. Том 7, №1 2009.
- William E. Lorensen, Harvey E. Cline: Marching Cubes: A high resolution 3D surface construction algorithm. In: Computer Graphics, Vol. 21, Nr. 4, July 1987
- Бугров Н.В., Голубєв В.І., Клименко А.С., Діжевскій А.Ю., обойми А.С., Какаурідзе Д.Г., Фролов П.В. Огляд алгоритмів тріангуляції неявно заданої поверхні, MEDIAS2012 Праці Міжнародної наукової конференції, 07-14 травня 2012 р Лімассол, Республіка Кіпр, Ізд.ІФТІ, С.151-173, ISBN 978-5-88835-023-2
- Planmeca Oy – Dental software – Planmeca Romexis [Електроний ресурс] – режим доступу до статті: http://www.planmeca.com/en/dental_software/planmeca_romexis
- СПП KORONIDA: концепція, принципи роботи, викорис- тання в телемедицині / Д.К. Калиновський, І.М. Матрос-Таранець, А.Г. Пономаренко, О.В. Чонгар // Укр.ж.телемед.мед.телемат. -2008. - Т.6, №1. - С.19-24. 14.
- Osirix Imaging Software – About Osirix[Електроний ресурс] – режим доступу до статті: http://www.osirix-viewer.com/AboutOsiriX.html
- Materialise Mimics[Електроний ресурс] – режим доступу до статті: http://biomedical.materialise.com/mimics
- Галанін М.П., Щеглов І.А. Розробка і реалізація алгоритмів тривимірної тріангуляції складних просторових областей: ітераційні методи, Москва 2006
- Baradeswaran.A, Joshua Selvakumar.L, Padma Priya.R, Reconstruction of Images into 3D Models using CAD Techniques, European Journal of Applied Engineering and Scientific Research, 2014, 3 (1):1-8