
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Цели и задачи исследования
- 2. Основные вопросы, которые должны быть решены в данной работе
- 3. Обзор исследований и разработок
- 4. Обзор элементов стенда
- 4.1 Двигатель постоянного тока
- 4.2 Тиристорный преобразователь
- 4.3 Отладочная плата stm32f4
- 5. Система автоматического регулирования
- 5.1 Математическое описание двигателя постоянного тока независимого возбуждения
- 5.2 Отрицательная обратная связь
- 5.3 Подчиненное регулирование координат
- Список источников
Введение
В настоящее время использование нерегулируемого привода встречается крайне редко даже в бытовых устройствах, не говоря уже о промышленности, где по большей части применяются асинхронные двигатели с управлением от преобразователей частоты. Однако, привода постоянного тока уже завоевали свою определенную нишу и будут востребованными еще долгое время.
Системы управления двигателями как переменного так и постоянного тока строятся, как правило, на базе систем подчиненного регулирования. Понимание принципов построения и функционирования таких систем лучше всего начать с изучения электропривода постоянного тока, а только затем переходить к более сложным системам – на базе двигателей переменного тока.
Двигателя постоянного тока делятся на несколько видов:
1. Машины постоянного тока с последовательным и смешанным возбуждение – применяются в основном в тяговых электроприводах, так как имеют повышенный момент относительно двигателей с параллельным или независимым возбуждением. Однако, пуск таких двигателей нельзя осуществлять без нагрузки.
2. Машины постоянного тока с независимым и параллельным возбуждением – имеют возможность управления не только за счет изменения напряжения якорной цепи, но и за счет регулирования тока обмотки возбуждения, так называемое двузонное регулирование.
3. Машины постоянного тока с постоянными магнитами отличаются от машин с независимым возбуждением повышенной надежностью, простотой, а также пониженным энергопотреблением. Ведь возбуждение осуществляется не за счет энергии из сети, а за счет магнитного поля постоянных магнитов. Однако, в этом случае, по сравнению с машиной постоянного тока с независимым возбуждением, отсутствует возможность управление скорости двигателя по цепи возбуждения.
4. Бесколлекторные двигатели постоянного тока отличаются от классических машин постоянного тока отсутствием коллекторно-щеточного механизма, благодаря чему, имеют повышенный ресурс, также такие двигатели считаются высокооборотистыми.
Регулируемыми источниками питания для двигателей постоянного тока в промышленности служат тиристорные преобразователи, однако если система маломощная, то возможно применение широтно-импульсной модуляции на базе транзисторов. В представляемой работе применяется первый вариант источника регулируемого напряжения. Конечно, он является устаревшим. Но на понимание основ построения систем подчиненного регулирования это не оказывает никакого влияния, так как в состав таких систем могут входить как тиристорные преобразователи так и транзистроные модули с ШИМ (являющиеся более быстродействующими). Разница заключается лишь в виде входного сигнала задания, который мы будет подавать на эти устройства.
1. Цели и задачи исследования
Целью данной работы является создание лабораторного стенда для исследования систем подчиненного регулирования скорости на базе двигателя постоянного тока с использованием, в качестве управляющего элемента, микроконтроллера STM32f4, а также прикладного пакета математического моделирования MATLAB. Исследование позволит закреплять знания, получаемые при изучении дисциплины Системы управления электроприводами
на реальной установке, для более глубокого понимания процессов управления и создания систем подчиненного регулирования.
2. Основные вопросы, которые должны быть решены в данной работе
- Выбор датчиков для системы автоматического регулирования скорости;
- Подключение микроконтроллера STM32f4 и всей периферии к существующему стенду;
- Разработка системы подчиненного регулирования скорости;
- Настройка регуляторов системы;
- Разработка системы защит от некорректной настройки регуляторов.
3. Структура стенда для исследования САР
Лабораторный стенд включает в себя двигатель постоянного тока с независимым возбуждением ПБСТ 32 с комплектным тахогенератором, тиристорный преобразователь БТУ 3601, гальванические развязки для защиты системы управления, микроконтроллер stm32f4 с датчиками тока и напряжения, компьютер с установленным пакетом математического моделирования MATLAB.
4. Обзор элементов силовой части стенда
4.1 Двигатель постоянного тока
Двигатель постоянного тока является синхронной машиной, у которой функции статора и ротора поменялись местами. Статор создает постоянное магнитное поле, а ротор, вращаясь в этом поле, преобразовывает электромагнитную энергию в механическую. Во вращающемся роторе щеточный узел выполняет функцию изменения направления тока при перемещении проводников обмотки ротора к противоположному полюсу обмотки статора.[1]
По схеме питания машины постоянного тока делятся на машины с независимым (рис. 1.1 а), параллельным (рис. 1.1 б), последовательным (рис. 1.1 в), смешанным возбуждением (рис. 1.1 г), а так же машины с магнитоэлектрическим возбуждением (рис. 1.1 д).
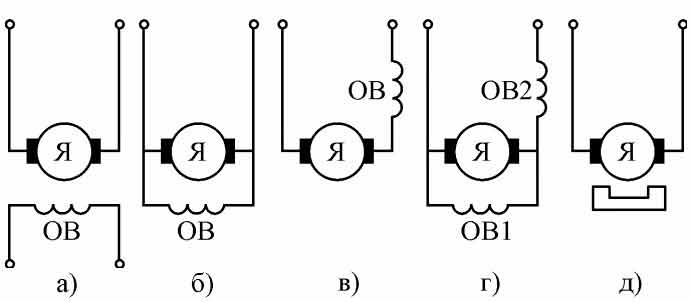
Рисунок 1 – Варианты подключения обмотки возбуждения
В данном стенде используется двигатель с обмоткой независимого возбуждения. В этом двигателе обмотка возбуждения подключена к отдельному источнику питания, благодаря чему ток в обмотке возбуждения не зависит от тока якоря.
Механические характеристики двигателя постоянного тока с независимым возбуждением линейны и пересекают ось ординат в точке холостого хода n0.
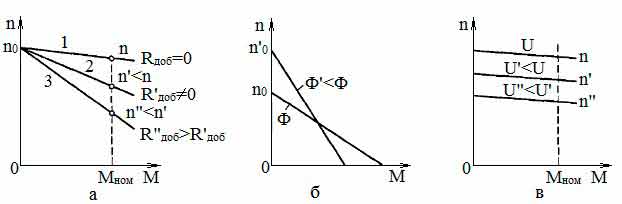
Рисунок 2 – Механические характеристики двигателя постоянного тока независимого возбуждения
Также машина с независимым возбуждением имеет возможность двузонного регулирования скорости. При уменьшении тока обмотки возбуждения скорость двигателя увеличивается, однако мощность остается неизменной, вследствие чего уменьшается момент. Такое управление широко применяется, например, в крановых механизмах, когда необходимо осуществить быстрое перемещение рабочего органа крана без груза.[2]
Двигатели серии ПБСТ изготовляются с независимым возбуждением, без стабилизирующей последовательной обмотки. Устойчивая работа электродвигателей ПБСТ обеспечивается схемой управления электропривода.
Двигатели ПБСТ допускают регулирование частоты вращения вверх от номинальной (при постоянной мощности) ослаблением поля главных полюсов или при кратковременных режимах длительностью не более 5 мин при полном потоке – изменением напряжения на якоре. При этом для электродвигателя ПБСТ с напряжением 220 В допускается повышение напряжения при номинальном токе якоря до 330 В. Частота вращения двигателя ПБСТ 32 не должна превышать 4000 об/мин. Двигатели допускают работу с малыми частотами вращения (0,5 —1,5 об/мин) при номинальном возбуждении и моменте, не превышающем номинальный.
Электродвигатели ПБСТ – реверсивные. Допустимое число реверсов в час – не более 400, при условии, что среднеквадратичный ток якоря не превышает номинального. Разность частот вращения двигателя постоянного тока ПБСТ при изменении направления вращения (при номинальных значениях нагрузки, напряжения и тока возбуждения) не должна превышать 5%.[3]
4.2 Тиристорный преобразователь
Тиристорным преобразователем постоянного тока (ТП) является устройство для преобразования переменного тока в постоянный с регулированием по заданному закону выходных параметров (тока и напряжения). Тиристорные преобразователи предназначаются для питания якорных цепей двигателей и их обмоток возбуждения.
Тиристорные преобразователи состоят из следующих основных узлов:
- Трансформатора или токоограничивающего реактора на стороне переменного тока;
- Выпрямительных блоков;
- Сглаживающих реакторов;
- Элементов системы управления, защиты и сигнализации.
Применение тиристорных преобразователей постоянного тока позволяет реализовать практически те же характеристики электропривода, что и при использовании вращающихся преобразователей в системах генератор-двигатель, т. е. регулировать в широких пределах частоту вращения и момент двигателя, получать специальные механические характеристики и нужный характер протекания переходных процессов при пуске, торможении, реверсе и т. д.[4]
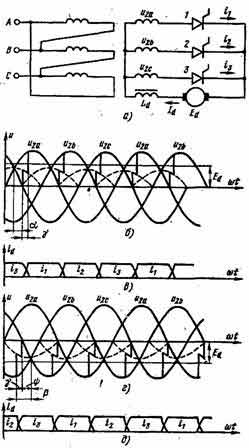
Рисунок 3 – Трехфазная нулевая схема (а) и диаграммы изменения тока и напряжения в выпрямительном (б, в) и инверторном (г, д) режимах
В силовую часть преобразователя БТУ 3601 входят: реверсивный мостовой тиристорный преобразователь, сглаживающий дроссель и согласующий трансформатор. Условно принято, что выпрямитель H
работает на направление назад
и собран на тиристорах V1-V6, а выпрямитель B
, содержащий V7-V12 – на направление вперед
. Комплект B
и H
представляют из себя две трехфазные мостовые схемы, включенные противопараллельно.
Защита тиристоров от коммутационных перенапряжений осуществляется RC-цепочками, включенными параллельно каждому тиристору. Поскольку тиристоры разных комплектов включены попарно параллельно, то таких RC-цепочек только шесть.
С помощью трансформаторов переменного тока (T2-T4) формируется сигнал выпрямленного тока преобразователя, гальванически развязанный от силовой цепи.[5]
4.3 Отладочная плата stm32f4
Отладочная плата stm32f4 базируется на 32-битном микроконтроллере ARM Cortex-M4, на плате установлен программатор ST-Link с тремя различными портами интерфейсами: виртуальный COM порт, устройство хранения и порт отладки.
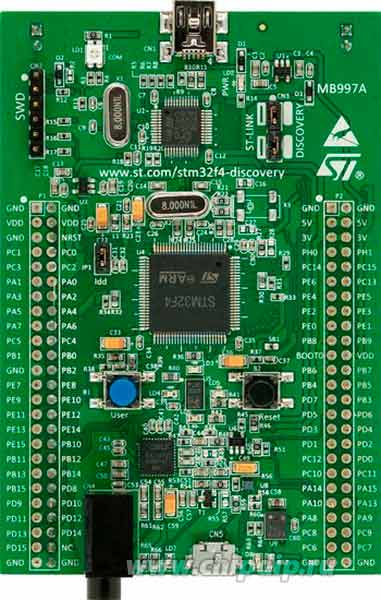
Рисунок 4 – Отладочная плата stm32f4
Питание платы осуществляется через USB или от внешнего источника питания 5В.
Частота микроконтроллера равна 168 МГц, данной производительности более чем достаточно для управления двигателем в системе автоматического регулирования.[6]
5. Система автоматического регулирования
С точки зрения управления, двигатель постоянного тока является идеальным преобразователем электрической энергии в механическую. Магнитный поток такого двигателя задается отдельной обмоткой, а напряжение, подводящееся к якорной цепи, разделяется на ЭДС, падение на активном сопротивлении и составляющую от изменения тока в индуктивности якоря. Чтобы получить мощность, отбираемую из сети, необходимо напряжение на якоре умножить на ток, а чтобы получить мощность на валу двигателя надо перемножить ЭДС и ток.
В настоящее время уже стала классической система подчиненного регулирования координат в системе «управляемый преобразователь – двигатель», но применяются и другие способы управления, такие как релейное регулирования выходной координаты, модальное управление, а в высокочастотных приводах используются структуры с прогнозированием.[7]
5.1 Математическое описание двигателя постоянного тока независимого возбуждения
Ток якоря двигателя постоянного тока определяется его ЭДС (Ея), сопротивлением якоря (Rя) и индуктивностью (Lя).
Электродвижущая сила выражается зависимостью E=kФω
- Ф – магнитный поток двигателя
- ω – угловая скорость
- k=pN/(2πa) – конструктивный коэффициент двигателя, где p – число пар полюсов, N – число активных проводников обмотки якоря, a – число параллельных ветвей обмотки якоря.
Среднее значение ЭДС якоря Eя=kФωcp;
Электромагнитный момент М=kФI;
Напряжение якорной цепи двигателя представляется как: Uя=RяIя+Iя(dIя/dt)+Eя;
Уравнение напряжения U=E+IR, где R=Rя+Rд – полное сопротивление цепи якоря;
Электромеханическая характеристика ω(I): ω=(U-IR)/(kФ);
Механическая характеристика ω(М): ω=U/(kФ)-MRд/(kФ)2.[7]
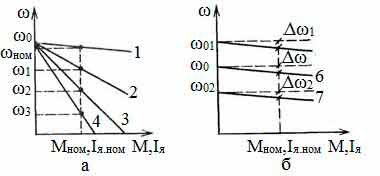
Рисунок 5 – Механические характеристики двигателя постоянного тока при различных сопротивлениях цепи якоря (а) и напряжениях (б)
5.2 Отрицательная обратная связь
Для стабилизации какой-либо величины в теории автоматического регулирования обычно применяют отрицательную обратную связь. Данный способ регулирования состоит в том, что есть некое заданное значение величины, которое мы хоти получить. Тогда для этого задания определяется задающее воздействие на объект регулирования, под действием которого он выходит из состояния покоя и начинает стремиться к заданной величине. Так в процессе приближения переменной состояния объекта регулирования к заданной величине происходит уменьшение сигнала рассогласования между сигналом задания и реальным значением регулируемой величины, то задающее воздействие на объект регулирования уменьшается. В идеале установившееся равновесие будет достигнуто в момент, когда задание сравняется с регулируемой переменной состояния.[7]
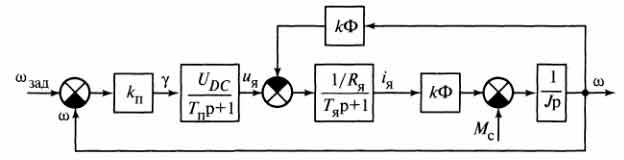
Рисунок 6 – Электропривод постоянного тока с отрицательной обратной связью по скорости
5.3 Подчиненное регулирование координат
Наиболее распространенным и известным способом регулирования координат электропривода в настоящее время является последовательная коррекция с подчиненным регулированием координат. Даная технология применима не только к электроприводам постоянного тока, она применяется в асинхронном электроприводе с векторным управлением, сервоприводах с синхронными двигателя и др.
Метод последовательной коррекции основан на том, что передаточные функции двух последовательных звеньев перемножаются и, если перед объектом регулирования поставить звено со специально подобранной передаточной функцией, можно получить некий результат их перемножения, который будет обладать необходимыми нам статическими и динамическими характеристиками.
Пусть объект регулирования имеет передаточную функцию Wo.p(p), а желаемая передаточная функция разомкнутой системы – Wж.раз(p), тогда функция регулятора может быть вычислена следующим образом:
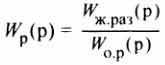
Действительно, если перед объектом регулирования последовательно включить регулятор с передаточной функцией, рассчитанной через данное выражение, то система, изображенная на рисунке 7, а, сведется к системе рисунке 7, б.
Рисунок 7 – Последовательная коррекция координат
Следует учесть, что не каждая желаемая передаточная функция может быть реализована. Так, преобразователь, питающий двигатель, хоть и представляется инерционным звеном, на самом деле содержит в себе звено запаздывания. Кроме того, мы можем получить, например, заданный ток в якоре двигателя мгновенно, так как его темп нарастания определяется индуктивностью якоря и напряжением, которое может выдать ваш преобразователь. Значит, сразу получить на выходе желаемое значение невозможно чисто по техническим соображения, а, следовательно, необходимо найти компромиссный вариант выбора желаемой передаточной функции.[7]
Рассмотрим пример построения многоконтурной системы подчиненного регулирования.
Объект регулирования представляется в виде последовательно соединенных звеньев Wоб1(p), Wоб2 (p), Wоб3(p) и т.д. с промежуточными координатами x1, x2, x3, ... и регулируемой (выходной) координатой X (см. структурную схему на рис.8. В качестве указанных координат используются такие координаты как ток, напряжение, ЭДС, магнитный поток, момент, скорость, положение.
Для управления каждой координатой организуется отдельный контур со своей обратной связью и своим регулятором. На рис. 8 датчики координат представлены звеньями с коэффициентами передачи Kx1, Kx2 и Kx, а передаточные функции регуляторов обозначены соответственно WR1, WR2 и WR3.
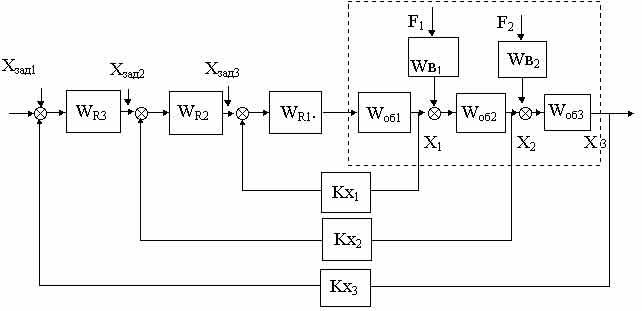
Рисунок 8 – Многоконтурная система подчиненного регулирования
Замкнутые контуры регулирования образуют систему, в которой имеется внутренний контур, состоящий из регулятора WR1 первого звена объекта Wоб1 и цепи обратной связи по координате X1, первый внешний контур, включающий в себя внутренний контур, второе звено объекта Wоб2, регулятор WR2 и цепь обратной связи по координате X2 и второй внешний контур, включающий в себя первый внешний контур, третье звено объекта управления Wоб3 , регулятор WR3 и обратную связь по координате X3, для рассматриваемого случая являющейся регулируемой, т.е. X3=X.
Выходной сигнал регулятора каждого внешнего контура является задающим для последующего, заключенного внутри него контура. Таким образом, каждый внутренний контур регулирования подчинен соответствующему внешнему.
Системы подчиненного регулирования характеризуются лучшим качеством управления по сравнению с одноконтурными системами по следующим причинам:
- возмущения, F1(p), F2(p), поступающие на части объекта, расположенные ближе к входу, прежде чем воздействовать на выходную координату X (регулируемую переменную) предварительно «ослабляются» во внутренних контурах;
- наличие внутренних контуров уменьшает влияние изменения параметров входной части на динамические свойства системы (снижается чувствительность системы к изменению параметров объекта);
- поведение регулируемой переменной X становится более быстрым (менее инерционным), если внутренний контур обеспечивает более быстрые собственные движения по сравнению с исходными.
К преимуществам системы подчиненного регулирования можно отнести
- простоту наладки и настройки (каждый контур включает в себя регулятор, за счет придания которому определенных динамических свойств, получаются стандартные характеристики). Настройку в процессе наладки ведут начиная с внутреннего контура. Поскольку регулятор имеет достаточно простую передаточную функцию, а качество настройки может быть легко оценено по результатам сравнения реакции контура на скачок управляющего воздействия со стандартной переходной характеристикой, наладка системы оказывается простой.
- удобство ограничения максимальных значений внутренних (промежуточных) координат системы (поскольку выходной сигнал регулятора внешнего контура является заданием для внутреннего контура, достигается за счет ограничений выходного сигнала регулятора внешнего контура)
Недостаток – некоторый проигрыш по быстродействию, связанный с последовательным воздействием на объект через внутренние контура, а не сразу через входное звено объекта.[8]
Список источников
- Усольцев А.А. Общая электротехника: Учебное пособие. – СПб: СПбГУ ИТМО, 2009. – 301 с.
- Теория электродвигателей постоянного тока – электронный ресурс. Режим доступа:
electrikam.com
- Электродвигатель постоянного тока серии ПБСТ – электронный ресурс. Режим доступа:
elektro-dvigateli.ru
- Теория тиристорных преобразователей – электронный ресурс. Режим доступа:
nntu.ru
- Тиристорный преобразователь напряжения БТУ 3601 – электронный ресурс. Режим доступа:
electricalschool.info
- Отладочная плата STM32F4 – электронный ресурс. Режим доступа:
st.com
- Анучин А.С. Системы управления электроприводов: учебник для вузов. – М.: Издательский дом МЭИ, 2015. – 373 с.
- Системы подчиненного регулирования – электронный ресурс. Режим доступа:
ets.ifmo.ru