
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Цілі і завдання дослідження
- 2. Основні питання, які повинні бути вирішені в даній роботі
- 3. Огляд досліджень та розробок
- 4. Огляд елементів стенду
- 4.1 Двигун постійного струму
- 4.2 Тиристорний перетворювач
- 4.3 Отладочная плата stm32f4
- 5. Система автоматичного регулювання
- 5.1 Математичне опис двигуна постійного струму незалежного збудження
- 5.2 Негативний зворотний зв'язок
- 5.3 Підлегле регулювання координат
- Список джерел
Вступ
В даний час використання нерегульованого приводу зустрічається вкрай рідко навіть в побутових пристроях, не кажучи вже про промисловість, де здебільшого застосовуються асинхронні двигуни з управлінням від перетворювачів частоти. Однак, приводу постійного струму вже завоювали свою певну нішу і будуть затребуваними ще довгий час.
Системи управління двигунами як змінного так і постійного струму будуються, як правило, на базі систем підпорядкованого регулювання. Розуміння принципів побудови і функціонування таких систем найкраще почати з вивчення електроприводу постійного струму, а тільки потім переходити до більш складних систем – на базі двигунів змінного струму.
Двигуна постійного струму діляться на кілька видів:
1. Машини постійного струму з послідовним і змішаним збудження – застосовуються в основному в тягових електроприводах, так як мають підвищений момент щодо двигунів з паралельним або незалежним збудженням. Однак, пуск таких двигунів не можна здійснювати без навантаження.
2. Машини постійного струму з незалежним і паралельним збудженням – мають можливість управління не тільки за рахунок зміни напруги якірного ланцюга, а й за рахунок регулювання струму обмотки збудження, так зване двозонним регулювання.
3. Машини постійного струму з постійними магнітами відрізняються від машин з незалежним збудженням підвищеною надійністю, простотою, а також зниженим енергоспоживанням. Адже порушення здійснюється не за рахунок енергії з мережі, а за рахунок магнітного поля постійних магнітів. Однак, в цьому випадку, в порівнянні з машиною постійного струму з незалежним збудженням, відсутня можливість управління швидкості двигуна по ланцюгу збудження.
4. Безколекторні двигуни постійного струму відрізняються від класичних машин постійного струму відсутністю колекторно-щіткового механізму, завдяки чому, мають підвищений ресурс, також такі двигуни вважаються високою частотою.
Регульованими джерелами живлення для двигунів постійного струму в промисловості служать тиристорні перетворювачі, однак якщо система малопотужна, то можливе застосування широтно-імпульсної модуляції на базі транзисторів. У представленої роботі застосовується перший варіант джерела регульованої напруги. Звичайно, він є застарілим. Але на розуміння основ побудови систем підпорядкованого регулювання це не робить ніякого впливу, так як до складу таких систем можуть входити як тиристорні перетворювачі так і транзістроние модулі з ШІМ (що є більш швидкодіючими). Різниця полягає лише у вигляді вхідного сигналу завдання, яке ми буде подавати на ці пристрої.
1. Цілі і завдання дослідження
Метою даної роботи є створення лабораторного стенду для дослідження систем підпорядкованого регулювання швидкості на базі двигуна постійного струму з використанням, в якості керуючого елемента, мікроконтролера STM32f4, а також прикладного пакета математичного моделювання MATLAB. Дослідження дозволить закріплювати знання, отримані при вивченні дисципліни Системи управління електроприводами
на реальній установці, для більш глибокого розуміння процесів управління і створення систем підпорядкованого регулювання.
2. Основні питання, які повинні бути вирішені в даній роботі
- Вибір датчиків для системи автоматичного регулювання швидкості;
- Підключення мікроконтролера STM32f4 і всієї периферії до існуючого стенду;
- Розробка системи підлеглого регулювання швидкості;
- Налаштування регуляторів системи;
- Розробка системи захистів від некоректного налаштування регуляторів.
3. Структура стенду для дослідження САР
Лабораторний стенд включає в себе двигун постійного струму з незалежним збудженням ПБСТ 32 з комплектним тахогенератором, тиристорний перетворювач БТУ 3601, гальванічні розв'язки для захисту системи управління, мікроконтролер stm32f4 з датчиками струму і напруги, комп'ютер з встановленим пакетом математичного моделювання MATLAB.
4. Огляд елементів силової частини стенду
4.1 Двигун постійного струму
Двигун постійного струму є синхронною машиною, у якій функції статора і ротора помінялися місцями. Статор створює постійне магнітне поле, а ротор, обертаючись в цьому полі, перетворює електромагнітну енергію в механічну. У роторі щітковий вузол виконує функцію зміни напрямку струму при переміщенні провідників обмотки ротора до протилежного полюса обмотки статора. [ 1 ]
За схемою живлення машини постійного струму діляться на машини з незалежним (рис. 1.1 а), паралельним (рис. 1.1 б), послідовним (рис. 1.1 в), змішаним збудженням (рис. 1.1 г), а так само машини з магнітоелектричним збудженням (рис. 1.1 д).
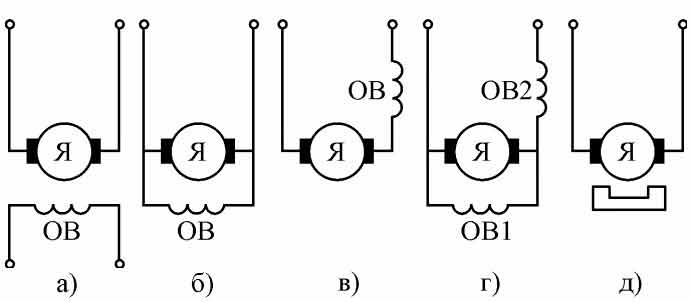
Малюнок 1 – Варіанти підключення обмотки збудження
В даному стенді використовується двигун з обмоткою незалежного збудження. У цьому двигуні обмотка збудження підключена до окремого джерела живлення, завдяки чому струм в обмотці збудження не залежить від струму якоря.
Механічні характеристики двигуна постійного струму з незалежним збудженням лінійні і перетинають вісь ординат в точці холостого ходу n0.
Малюнок 2 – Механічні характеристики двигуна постійного струму незалежного збудження
Також машина з незалежним збудженням має можливість двозонним регулювання швидкості. При зменшенні струму обмотки збудження швидкість двигуна збільшується, проте потужність залишається незмінною, внаслідок чого зменшується момент. Таке управління широко застосовується, наприклад, в кранових механізмах, коли необхідно здійснити швидке переміщення робочого органу крана без вантажу. [ 2 ]
Двигуни серії ПБСТ виготовляються з незалежним збудженням, без стабілізуючою послідовної обмотки. Стійка робота електродвигунів ПБСТ забезпечується схемою управління електроприводу.
Двигуни ПБСТ допускають регулювання частоти обертання вгору від номінальної (при постійній потужності) ослабленням поля головних полюсів або при короткочасних режимах тривалістю не більше 5 хв при повному потоці – зміною напруги на якорі. При цьому для електродвигуна ПБСТ з напругою 220 В допускається підвищення напруги при номінальному струмі якоря до 330 В. Частота обертання двигуна ПБСТ 32 не повинна перевищувати 4000 об / хв. Двигуни допускають роботу з малими частотами обертання (0,5 -1,5 об / хв) при номінальному збудженні і моменті, що не перевищує номінальний.
Електродвигуни ПБСТ – реверсивні. Допустима кількість реверсів на годину – не більше 400, за умови, що середньоквадратичний струм якоря не перевищує номінального. Різниця частот обертання двигуна постійного струму ПБСТ при зміні напрямку обертання (при номінальних значеннях навантаження, напруги і струму збудження) не повинна перевищувати 5%. [ 3 ]
4.2 Тиристорний перетворювач
Тиристорним перетворювачем постійного струму (ТП) є пристрій для перетворення змінного струму в постійний з регулюванням по заданому закону вихідних параметрів (струму і напруги). Тиристорні перетворювачі призначаються для живлення якірного кола двигунів і їх обмоток збудження.
Тиристорні перетворювачі складаються з наступних основних вузлів:
- Трансформатора або струмообмежувального реактора на стороні змінного струму;
- Випрямних блоків;
- Згладжують реакторів;
- Елементів системи управління, захисту та сигналізації.
Застосування тиристорних перетворювачів постійного струму дозволяє реалізувати практично ті ж характеристики електроприводу, що і при використанні обертових перетворювачів в системах генератор-двигун, т. Е. Регулювати в широких межах частоту обертання і момент двигуна, отримувати спеціальні механічні характеристики і потрібний характер протікання перехідних процесів при пуску, гальмуванні, реверсі та т. д. [ 4 ]
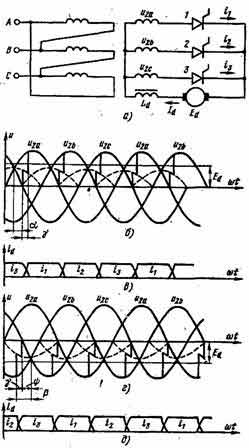
Малюнок 3 – Трифазна нульова схема (а) і діаграми зміни струму і напруги в випрямному (б, в) і інверторному (г, д) режимах
У силову частину перетворювача БТУ 3601 входять: реверсивний бруківці тиристорний перетворювач, що згладжує дросель і узгоджувальний трансформатор. Умовно прийнято, що випрямляч H
працює на напрям назад
і зібраний на тиристорах V1-V6, а випрямляч B
, що містить V7-V12 – на напрям вперед
. Комплект B
і H
являють собою дві трифазні мостові схеми, включені протівопараллельно.
Захист тиристорів від комутаційних перенапруг здійснюється RC-ланцюжками, включеними паралельно кожному тиристору. Оскільки тиристори різних комплектів включені попарно паралельно, то таких RC-ланцюжків тільки шість.
За допомогою трансформаторів змінного струму (T2-T4) формується сигнал випрямленого струму перетворювача, гальванічно розв'язаний від силового ланцюга. [ 5 ]
4.3 Отладочная плата stm32f4
Отладочная плата stm32f4 базується на 32-бітному мікроконтролері ARM Cortex-M4, на платі встановлений програматор ST-Link з трьома різними портами інтерфейсами: віртуальний COM порт, пристрій зберігання і порт налагодження.
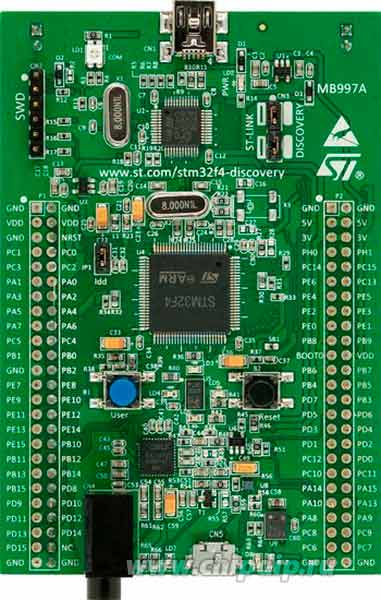
Малюнок 4 – Отладочная плата stm32f4
Живлення плати здійснюється через USB або від зовнішнього джерела живлення 5В.
Частота мікроконтролера дорівнює 168 МГц, даної продуктивності більш ніж достатньо для управління двигуном в системі автоматичного регулювання. [ 6 ]
5. Система автоматичного регулювання
З точки зору управління, двигун постійного струму є ідеальним перетворювачем електричної енергії в механічну. Магнітний потік такого двигуна задається окремою обмоткою, що а напруга, що підводять до якірного ланцюга, розділяється на ЕРС, падіння на активному опорі і складову від зміни струму в індуктивності якоря. Щоб отримати потужність, відбирається з мережі, необхідна напруга на якорі помножити на струм, а щоб отримати потужність на валу двигуна треба перемножити ЕРС і струм.
В даний час вже стала класичною система підпорядкованого регулювання координат в системі керований перетворювач – двигун
, але застосовуються й інші способи управління, такі як релейне регулювання вихідний координати, модальне керування, а в високочастотних приводах використовуються структури з прогнозуванням. [ 7 ]
5.1 Математичне опис двигуна постійного струму незалежного збудження
Струм якоря двигуна постійного струму визначається його ЕРС (Е я ), опором якоря (R я ) і індуктивністю (L я ).
Електрорушійна сила виражається залежністю E = kФω
- Ф – магнітний потік двигуна
- ω – кутова швидкість
- k = pN / (2πa) – конструктивний коефіцієнт двигуна, де p – число пар полюсів, N – число активних провідників обмотки якоря, a – число паралельних гілок обмотки якоря.
Середнє значення ЕРС якоря E я = kФωcp;
Електромагнітний момент М = kФI;
Напруга якірного ланцюга двигуна представляється як: U я = R я I я + I я (dI я / dt) + E я ;
Рівняння напруги U = E + IR, де R = R я + R д – повний опір ланцюга якоря;
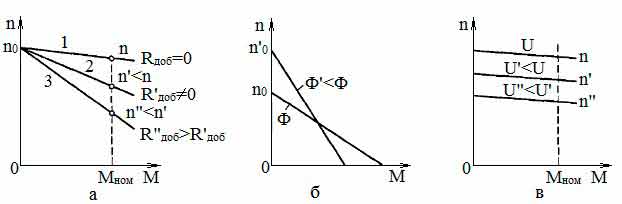
Електромеханічна характеристика ω (I): ω = (U-IR) / (kФ);
Механічна характеристика ω (М): ω = U / (kФ) -MR д / (kФ) 2. [ 7 ]
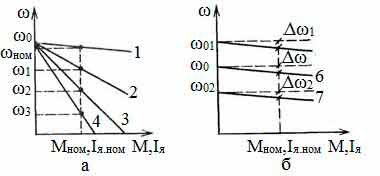
Малюнок 5 – Механічні характеристики двигуна постійного струму при різних опорах ланцюга якоря (а) і напружених (б)
5.2 Негативний зворотний зв'язок
Для стабілізації будь-якої величини в теорії автоматичного регулювання зазвичай застосовують негативний зворотний зв'язок. Даний спосіб регулювання полягає в тому, що є якесь задане значення величини, яке ми хоті отримати. Тоді для цього завдання визначається задає вплив на об'єкт регулювання, під дією якого він виходить зі стану спокою і починає прагнути до заданої величині. Так в процесі наближення змінної стану об'єкта регулювання до заданої величини відбувається зменшення сигналу неузгодженості між сигналом завдання і реальним значенням регульованої величини, то задає вплив на об'єкт регулювання зменшується. В ідеалі встановлену рівновагу буде досягнуто в момент, коли завдання зрівняється з регульованої змінної стану. [ 7 ]
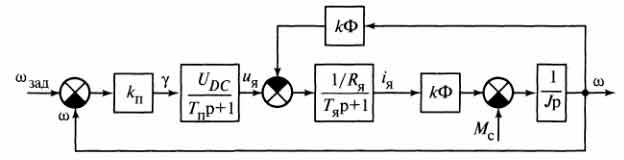
Малюнок 6 – Електропривод постійного струму з негативним зворотним зв'язком за швидкістю
5.3 Підлегле регулювання координат
Найбільш поширеним і відомим способом регулювання координат електропривода в даний час є послідовна корекція з підлеглим регулюванням координат. Даная технологія може бути застосована не тільки до електроприводів постійного струму, вона застосовується в асинхронному електроприводі з векторним керуванням, сервоприводах з синхронними двигуна і ін.
Метод послідовної корекції заснований на тому, що передавальні функції двох послідовних ланок перемножуються і, якщо перед об'єктом регулювання поставити ланка зі спеціально підібраною передавальної функцією, можна отримати якийсь результат їх перемноження, який буде володіти необхідними нам статичними і динамічними характеристиками.
Нехай об'єкт регулювання має передавальну функцію W o.p (p), а бажана передатна функція розімкнутої системи – W ж.раз (p), тоді функція регулятора може бути обчислена в такий спосіб:
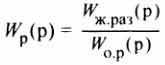
Дійсно, якщо перед об'єктом регулювання послідовно включити регулятор з функцією передачі, розрахованої через цей вислів, то система, зображена на малюнку 7, а, зведеться до системи малюнку 7, б.
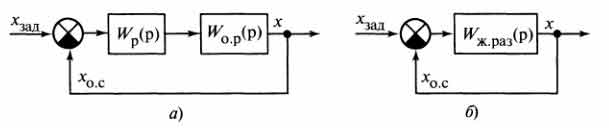
Малюнок 7 – Послідовна корекція координат
Слід врахувати, що не кожна бажана передатна функція може бути реалізована. Так, перетворювач, що живить двигун, хоч і видається інерційним ланкою, насправді містить в собі ланка запізнювання. Крім того, ми можемо отримати, наприклад, заданий струм в якорі двигуна миттєво, так як його темп наростання визначається індуктивністю якоря і струмом, який може видати ваш перетворювач. Значить, відразу отримати на виході бажане значення неможливо чисто з технічних міркування, а, отже, необхідно знайти компромісний варіант вибору бажаної передавальної функції. [ 7 ]
Розглянемо приклад побудови багатоконтурною системи підлеглого регулювання.
Об'єкт регулювання представляється у вигляді послідовно з'єднаних ланок W об1 (p), W О2 (p), W об3 (p) і т.д. з проміжними координатами x 1 , x 2 , x 3 , ... і регульованою (вихідний) координатою X (див. структурну схему на рисунку 8. Як зазначених координат використовуються такі координати як струм, напруга, ЕРС, магнітний потік, момент , швидкість, положення.
Для управління кожної координатою організовується окремий контур зі своєю зворотним зв'язком і своїм регулятором. На рис. 8 датчики координат представлені ланками з коефіцієнтами передачі K x1 , K x2 і K x , а передавальні функції регуляторів позначені відповідно W R1 , W R2 і W R3 .
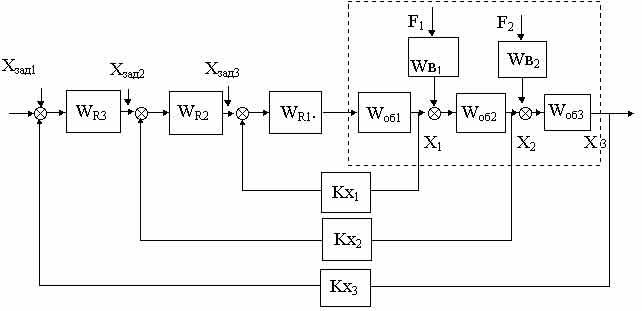
Малюнок 8 – Багатоконтурна система підпорядкованого регулювання
Замкнені контури регулювання утворюють систему, в якій є внутрішній контур, що складається з регулятора WR1 першої ланки об'єкта Wоб1 і ланцюга зворотного зв'язку з координування X1, перший зовнішній контур, що включає в себе внутрішній контур, друга ланка об'єкта W О2 , регулятор W R2 і ланцюг зворотного зв'язку з координування X 2 і другий зовнішній контур, що включає в себе перший зовнішній контур, третя ланка об'єкта управління W об3 , регулятор W R3 і зворотний зв'язок з координування X 3 , для розглянутого випадку є регульованою, тобто X 3 = X.
Вихідний сигнал регулятора кожного зовнішнього контуру є задає для подальшого, укладеного всередині нього контуру. Таким чином, кожен внутрішній контур регулювання підпорядкований відповідному зовнішньому.
Системи підлеглого регулювання характеризуються кращою якістю управління в порівнянні з одноконтурними системами з наступних причин:
- обурення, F 1 (p), F 2 (p), що надходять на частини об'єкта, розташовані ближче до входу, перш ніж впливати на вихідну координату X (регульовану змінну) попередньо
послаблюються
у внутрішніх контурах; - наявність внутрішніх контурів зменшує вплив зміни параметрів вхідної частини на динамічні властивості системи (знижується чутливість системи до зміни параметрів об'єкта);
- поведінку регульованої змінної X стає швидшим (менш інерційним), якщо внутрішній контур забезпечує більш швидкі власні руху в порівнянні з вихідними.
До переваг системи підлеглого регулювання можна віднести
- простоту наладки і настройки (кожен контур включає в себе регулятор, за рахунок надання якому певних динамічних властивостей, виходять стандартні характеристики). Налаштування в процесі налагодження ведуть починаючи з внутрішнього контуру. Оскільки регулятор має досить просту передавальну функцію, а якість настройки може бути легко оцінено за результатами порівняння реакції контуру на стрибок керуючого впливу зі стандартною перехідною характеристикою, налагодження системи виявляється простий.
- зручність обмеження максимальних значень внутрішніх (проміжних) координат системи (оскільки вихідний сигнал регулятора зовнішнього контуру є завданням для внутрішнього контуру, досягається за рахунок обмежень вихідного сигналу регулятора зовнішнього контуру)
Недолік – деякий програш по швидкодії, пов'язаний з послідовним впливом на об'єкт через внутрішні контуру, а не відразу через вхідний ланка об'єкта. [ 8 ]
Список источников
- Усольцев А.А. Общая электротехника: Учебное пособие. – СПб: СПбГУ ИТМО, 2009. – 301 с.
- Теория электродвигателей постоянного тока – электронный ресурс. Режим доступа:
electrikam.com
- Электродвигатель постоянного тока серии ПБСТ – электронный ресурс. Режим доступа:
elektro-dvigateli.ru
- Теория тиристорных преобразователей – электронный ресурс. Режим доступа:
nntu.ru
- Тиристорный преобразователь напряжения БТУ 3601 – электронный ресурс. Режим доступа:
electricalschool.info
- Отладочная плата STM32F4 – электронный ресурс. Режим доступа:
st.com
- Анучин А.С. Системы управления электроприводов: учебник для вузов. – М.: Издательский дом МЭИ, 2015. – 373 с.
- Системы подчиненного регулирования – электронный ресурс. Режим доступа:
ets.ifmo.ru