Рисунок 1. 3D модель робота-тележки.
УДК 519.712.1
Политехнический институт Сибирского Федерального Университета
Автор: Фролов Д. П., научный руководитель проф., канд. техн. наук Масальский Г. Б.
Источник: Международная конференция Проспект свободный 2015
СФУ 2015 г.
Мобильные роботы в современном мире нашли широкое применение в развитие автоматизации.
Эксперементальный Мобильный робот, разработанный на кафедре
Робототехника и техническая кибирнетика
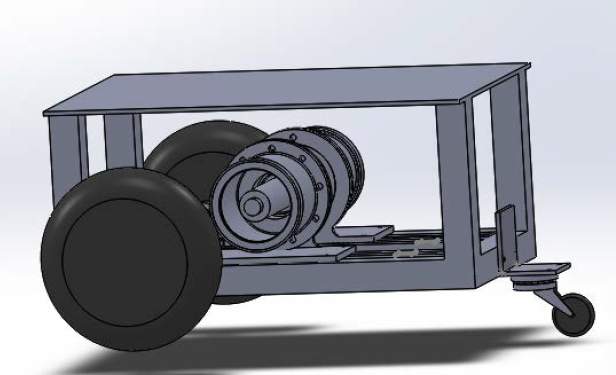
представляет собой трехколесную
платформу, которую можно использовать в производственный помещениях для
обслуживания участков механообработки, а также транспортировки деталей в
складских помещениях (рисунок 1).
Рисунок 1. 3D модель робота-тележки.
Задача модернизации состоит в установке манипулятора на тележку и соответственно:
Пересчет нагрузки на Мобильный комплекс: из полученных расчетов получилось, что на ведущие колеса нагрузка составляет F1=F2=695H, на пассивное колесо – F3=964H.
Для расчета конструкции пассивного колеса было необходимо произвести предварительный расчет подшипников (подшипников качения).
Для расчета каждого из подшипников был произведен комплексный расчет.
Расчет радиального однорядного шарикоподшипника:
Динамическая грузоподъемность при статическом расчете С = 0.102кН. При кинематическом расчете была определена частота вращения вала n = 2000об / мин при максимальной скорости передвижения мобильного робота V = 30км / ч = 500м / мин.
Для динамического расчета динамической грузоподъемности мы воспользуемся данными полученными при статическом и кинематическом расчете: С =1.24кН
Исходя из технических характеристик подшипника имеем, что динамическая грузоподъемность подшипника в 11 раза больше расчетного значения. Что дает нам запас прочности конструкции.
Расчет упорного подшипника:
Динамическая грузоподъемность при статическом расчете С = 0.102кН. При кинематическом расчете частота вращения вала была условно принята n = 2об / мин в связи с тем, что упорный подшипник отвечает за поворотные действия пассивного колеса МР.
Для динамического расчета динамической грузоподъемности мы воспользуемся данными полученными при статическом и кинематическом расчете: С = 0.25кН
Исходя из технических характеристик подшипника имеем, что динамическая грузоподъемность подшипника в 69 раза больше расчетного значения. Что дает нам запас прочности конструкции.
Рассмотрим модель робота-тележки, приводимой в движение двумя соосными, неповоротными, независимыми, активными (ведущими) колесами ( 1-левое, 2-правое ) и одним пассивным (опорным) колесом в абсолютной декартовой системе координат x = x1, x2 и относительной системе координат z = z1, z2 (рис. 3.16).
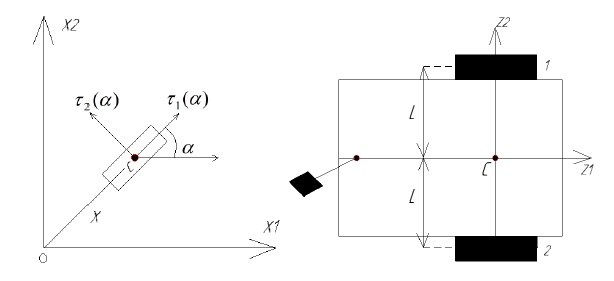
Рисунок 2.Кинематическая схема робота-тележки.
Каждое ведущее колесо приводится в движение двигателем постоянного тока. Опорное колесо обеспечивает поддержку платформы тележки в горизонтальном положении, вращается свободно вокруг собственной оси и вокруг вертикальной оси с эксцентриситетом. С – характерная точка робота-тележки (центр-масс). Положение платформы в каждый момент времени однозначно определяется вектором x = (x1 , x2) координат точки с. При построение модели движения робота-тележки в горизонтальной плоскости в относительной системе координат z = z1, z2 , связанной с движущейся платформой, предполагается:
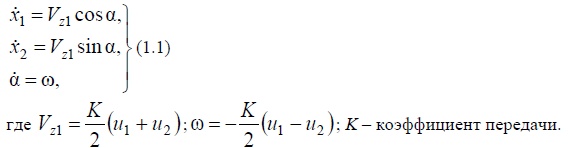
Кинематическая модель робота-тележки. Данная модель не учитывает массо-инерционные характеристики робота- тележки и имеет вид:
Структурная схема кинематической модели (1.1) приведена на (рис. 3.1), а ее модель в Matlab на (рис. 3.2).
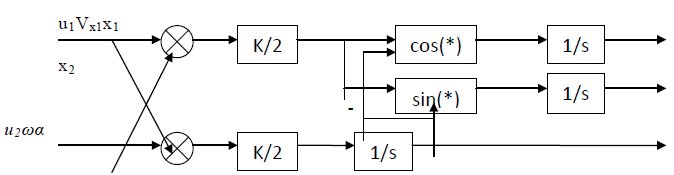
Рис. 3.1. Структурная схема кинематической модели робота-тележки
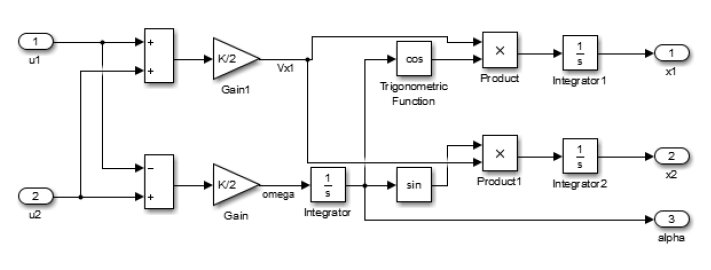
Рис. 3.2. Кинематическая модель робота-тележки в Simulink