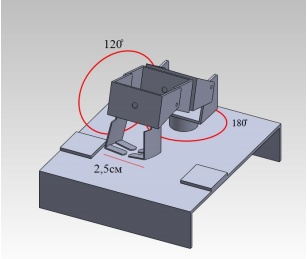
Рис. 1. Кинематическая схема манипулятора
УДК 621.865.8 :004.896
Автор: Со Со Тав У
Источник: Молодежный научно-технический вестник
МГТУ им. Н. Э. Баумана, 2015 г.
Существует множество вариантов использования роботов-манипуляторов для решения различных производственных задач – сварка, резка, покраска, укладка товаров, перестановка деталей, техническое зрение, сборка механизмов [1-5]. Робот-манипулятор может управляться различными способами, например, с пульта дистанционного управления или с использованием голосовых команд.
В данном проекте представлена реализацияречевого управления (SCAS – Speech Controlled Automation System) двухстепенным роботом-манипулятором с помощью программно-аппаратного решения Visual Basic – Arduino [6-7].
При проектировании робота манипулятора необходимо решить следующие задачи:
Манипулятор (Рис.1) имеет три степени свободы. Локтевое сочление может перемещаться вертикально вверх-вниз по дуге 120° и поворачиваться вокруг в кистевом сочленении на 180°. Захват руки робота может брать и удерживать объекты размером до 2,5 см.
Рис. 1. Кинематическая схема манипулятора
Для макета манипулятора использованы кронштейны и захваты Pan/Tilt Bracket (Рис.2). Они многофункциональны, малогабаритны и удобны для конструирования роботов небольших размеров.

Рис. 2. Кронштейны и захваты Pan/Tilt Bracket
Для приведения манипулятора в движение использованы микросервоприводы FS90, которые управляются с помощью контроллера Atmega 328P-PU.
В таблице 1 представлены команды речевого управления манипулятором.

Голосовые команды управления воспринимаются через микрофон, программа Speech recognition распознает речь и передает команды управления в специализированное ПО для сравнения со стандартными командами [5-7]. Если результат соответствует какой-либо из стандартных команд, соответствующий сигнал управления передается в контроллер для реализации закона управления сервоприводом по методу широтно-импульсной модуляции, ШИМ (PWM – Pulse-width modulation). Алгоритм функционирования программно- аппаратного комплекса представлен на рисунке 3.
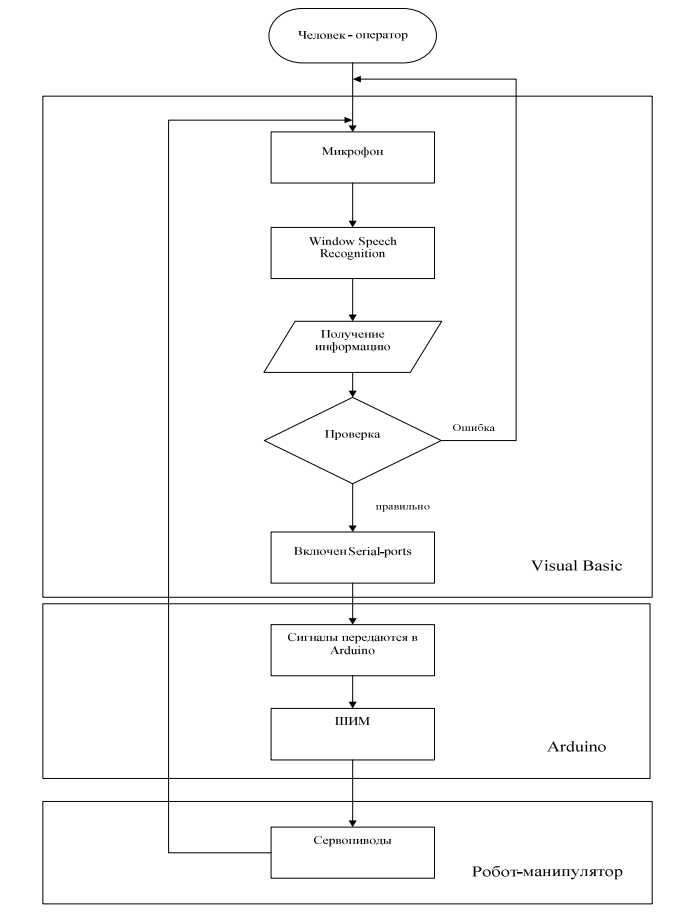
Рис. 3. Алгоритм речевого управления роботом-манипулятором
Выводы
Речевое управление очень удобно и просто в использовании. Оно незаменимо для людей с ограничеными возможностями, которые могут использовать для работы только звуковые команды.
Для речевого управления характерна зависимость от особенностей дикцией человека- оператора.
Разработанное в рамках данного проекта универсальное программно-аппаратное решение на базе Visual Basic – Arduino может быть использовано при реализации речевого управления роботами-манипуляторами различных типов и создании интеллектуальных систем автоматического управления [5].