СИСТЕМА БЕСПРОВОДНОГО УПРАВЛЕНИЯ УДАЛЕННЫМ ПОДВИЖНЫМ ОБЪЕКТОМ
Автор: А.О. Кравецкий, В.А. Краснокутский
Источник: Электронный архив ДонНТУ.
Аннотация
Рассмотрены вопросы построения системы управления удаленным подвижным объектом на примере игрушечного танка. Предложено устройство и алгоритмы управления подвижным объектом. Приведены алгоритмы управления удаленным подвижным объектом.
Постановка проблемы. В настоящее время все большее распространение получают игровые системы, в которых используются подвижные объекты. Для управления такими объектами могут быть использованы сетевые технологии, в частности Интернет. В статье рассматриваются вопросы построения системы управления подвижным объектом (танком). Управление осуществляется с помощью оператора компьютера через радиоканал. Для реализации системы управления необходимо было решить ряд задач:
· выбрать способ и схему передачи команд управляемому объекту;
· разработать схему устройства управления подвижным объектом;
· разработать алгоритмы и программное обеспечение модуля управления подвижным объектом.
Анализ литературы. Проведен анализ различных модулей радиосвязи и контроллеров, на которых может быть реализовано устройство управления подвижным объектом. На основе анализа были выбраны модули радиосвязи с частотной модуляцией HOPE RF HM-R433 и HOPE RF HM-T433 [1] и контроллер ATmega 8 фирмы Atmel [2]. Выбранные аппаратные средства позволяют построить систему управления, отвечающую поставленным требованиям и невысокой стоимости.
Цель статьи – провести анализ одного из способов построения системы управления удаленным подвижным объектом.
Постановка задачи исследования. Необходимо разработать и исследовать функционирование беспроводной системы управления подвижным объектом. При этом система должна иметь возможность управления несколькими подвижными объектами от одного терминального устройства и обеспечивать необходимый уровень помехозащищенности.
Решение задач и результаты исследований. Для решения поставленной задачи предлагается система управления, структурная схема которой представлена на рис.1. Управляемым объектом является игрушка – танк. Управление осуществляется с помощью терминального устройства.
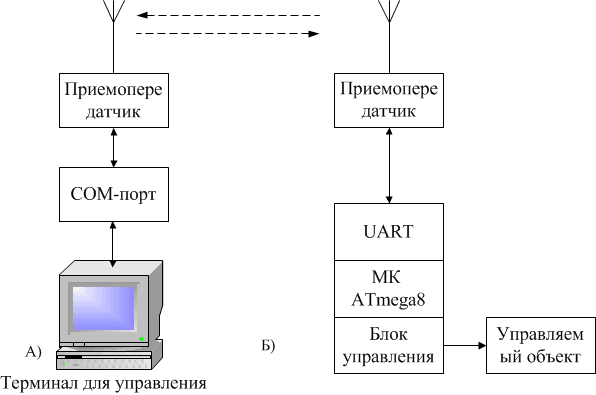
Рисунок 1. Схема связи между компьютером (А) и танком (Б)
Передача команд от терминального устройства на объект управления осуществляется с помощью радиосвязи, которая реализована на модулях частотной модуляции HOPE RF HM-R433 и HOPE RF HM-T433 [1]. Модули частотной модуляции подключаются к терминальному устройству и к устройству управления подвижного объекта через последовательный интерфейс RS-232 (СОМ-порт). Устройство управления подвижным объектом построено на микроконтроллере ATmega 8 фирмы Atmel [2]. Контроллер получает команды через радиосвязь, анализирует их и выдает соответствующие управляющие сигналы на блок управления объекта. Команды управления объектом приведены в таблице 1. Команды представляют собой коды ASCII.
Для управления объектом на компьютере установлена программа Terminal 1.9b, которая позволяет отправлять в СОМ-порт и получать из СОМ-порта информацию. Терминальная программа имитирует работу органа управления объектом типа джойстик или клавиатуры и используется только для отладки системы управления.
Таблица 1 – Команды танка
|
№ команды |
Команда |
Код команды |
Код в ASCII |
|
0 |
Движение вперед с заданной скоростью |
46 |
F |
|
1 |
Движение назад с заданной скоростью |
42 |
B |
|
2 |
Поворот налево |
4C |
L |
|
3 |
Поворот направо |
52 |
R |
|
4 |
Поворот башни влево |
45 |
E |
|
5 |
Поворот башни вправо |
49 |
I |
|
6 |
Выстрел |
48 |
H |
|
7 |
Включить светодиод здоровья № N, где N от 1 до 4 |
2B |
+ |
|
8 |
Выключить светодиод здоровья № N, где N от 1 до 4 |
2D |
- |
|
9 |
Включить сигнальный маяк |
4E |
N |
|
10 |
Отключить сигнальный маяк |
43 |
C |
|
11 |
Изменить скорость |
53 |
S |
|
12 |
Разрешение на отправку данных к серверу |
54 |
T |
|
13 |
Запуск процедуры измерения заряда батареи |
56 |
V |
|
14 |
Запуск процедуры выявления попадания в танк |
4F |
O |
Команды передаются в виде пакета данных. Пакет данных при передаче команды имеет следующий формат:
· байт для выхода передатчика из спящего режима;
· 10 одинаковых символов для идентификации пакета из общего шума;
· код приемника (номер танка);
· код команды;
· уточнение для команды;
· признак конца пакета.
Устройство управления объекта принимает пакет данных, обрабатывает его и выполняет соответствующую команду. В случае получения команды отправки данных на сервер устройство управления объекта отправляет пакет со следующей структурой:
- байт для включения передатчика;
- 10 одинаковых символов для идентификации пакета из общего шума;
- код передатчика (номер танка);
- заряд батареи;
- уровень заряда с датчика для выявления события попадания в танк;
- признак конца пакета.
Устройство управления подвижного объекта реализовано на микроконтроллере ATmega 8 фирмы Atmel, структурная схема которого показана на рис. 2. Радиомодули подключаются к устройству управления через последовательный интерфейс UART микроконтроллера. Модуль приемника HM-R433 к входу RXD, а модуль передатчика к TXD. Для управления скоростью вращения двигателей используется широтно-импульсная модуляция (ШИМ), которая реализована с помощью таймеров микроконтроллера. Для управления левым двигателем используется выход ОС1A микроконтроллера, а для управления правым – ОС1В. Направление вращения левого и правого двигателя задается сигналами с выводов PB5 и PB6.
Датчик измерения уровня заряда батареи подключается к входу ADC0 аналого-цифрового преобразователя (АЦП) микроконтроллера. Датчик определения попадания в танк – к входу ADC1.
Башня танка, диод имитации выстрела, диоды здоровья управляются дискретными сигналами портов микроконтроллера.
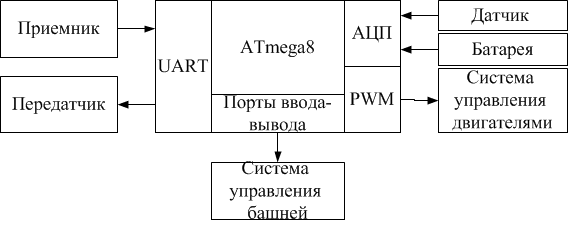
Рисунок 2. Структурная схема устройства управления танком
Алгоритм работы главной программы микроконтроллера приведен на рис.3. Программа инициализирует порты ввода вывода, прерывания для последовательного порта UART, аналого-цифрового преобразователя, таймеров, ШИМ. В цикле главной программы проверяется признак готовности сообщения для выполнения и предназначено ли оно для данного объекта. При совпадении номера сообщения с номером объекта выполняется принятая команда.
Рисунок 3. Алгоритм работы главной программы
Прием сообщения выполняется по прерыванию. Приемник устройства управления объекта принимает сигнал все время. Для выделения пакета из общего шума пространства сигналов приемник должен принять десять одинаковых символов, после чего идет прием оставшейся части пакета вплоть до признака конца сообщения рис.4.
Рассмотрим выполнение некоторых типовых команд управления танком. Для изменения направления движения танка необходимо подать (убрать) сигнал с выходов PB5 и (или) PB6. Далее следует выждать время, которое указано как уточнение для команды, и после восстановить сигналы на выходах PB5 и PB6. На рис.5. приведен алгоритм поворота влево.
Алгоритмы поворота танка вправо, поворота башни и выстрела в целом идентичны рассмотренному алгоритму поворота влево.
Рисунок 4. Алгоритм обработки приема сообщения
Для изменения скорости движения танка необходимо изменить значения регистров OCR1A и OCR1B.
Для получения заряда на входе АЦП необходимо считать значение из пары регистров ADCH и ADCL.
В целом, все алгоритмы, кроме приема данных и измерения заряда с помощью АЦП, выполняют задачу посылки управляющего слова в соответствующий порт ввода-вывода в зависимости от принятого сообщения.
Рисунок 5. Алгоритм поворота влево
Выводы. Рассмотрены вопросы построения системы радиоуправления удаленным подвижным объектом. Разработаны алгоритмы управления объектом. Приведенные алгоритмы могут быть использованы для автоматизированного управления различными подвижными роботизированными комплексами.
Список литературы
1. Светлов С. Радиомодули HOPE-RF/ Беспроводные технологии – 2009, №2. – С.32 – 35.
2. Евстифеев А.В. Микроконтроллеры AVR семейства Mega. Руководство пользователя. — М.:Издательский дом «Додэка-XXI», 2007. — 592 с.