
Abstract
The contents
- Introduction
- 1. Goals and objectives
- 2. Purpose and classification of the AR
- 2.1 Analysis of the efficiency of reclosure for increasing the stocks of dynamic stability
- 3. General characteristics of EB
- 3.1 Analysis of the effectiveness of EB for increasing the stocks of dynamic stability
- 4. Software environment for payments
- Conclusion
- References
Introduction
Recently, there has been a tendency to unite the power systems. This has a number of advantages, such as: efficient use of energy resources, increasing economic output of electric power, reducing the total installed capacity of power plants of integrated power systems, increasing the unified capacity of the units, increasing the reliability and stability of the system through redundancy and AA, increasing maneuverability in power systems, unloading of main power lines, the probability of joining new customers, reducing the number of repair personnel and automation the production process.
But with all these advantages, the combination of power systems has a number of shortcomings. These include: the complication of relay protection, automation and control modes. To eliminate these shortcomings, development methods for optimizing regime control and maximizing the effectiveness of automatic emergency control. The scope of application of emergency control is, first of all, electromechanical transients in emergency modes.
1. Goals and objectives
The purpose of this work is to assess the effectiveness and justification for the application in the electric power systems of various types of automatic reclosure and electric braking of generators as a means of emergency switching automatics.
To achieve this goal, the following tasks must be accomplished:
- The analysis of existing AR methods on single and double-circuit lines with two-way power, connecting the transmitting and receiving parts of the EPS.
- Analysis of the electric braking behavior of generators.
- A set of programs for calculating transients in the case of disturbances caused by various types of short circuits, their elimination and re-inclusion for possible cases of successful or unsuccessful reclosure, as well as calculation of transient processes with EB generators, sequential and parallel inclusion of active resistances in electrical chain.
- An analysis was made of the effectiveness of AR and EB generators as a means of emergency control of ES designed to increase the reserves of dynamic stability of electric power systems.
The main objectives of emergency control are to ensure the required level of reliability of electricity supply to consumers and the survivability of the power system [1].
2. Purpose and classification of the AR
The main purpose of the reclosure is to restore the operation of the ES object: the consumer, the power transmission line section, the substation section or the electric motor [2].
The reclassification is classified according to the following main features:
- by the multiplicity of the action (single and multiple);
- by the number of phases to be switched on;
- by type of equipment to be switched on – AR transmission line, bus of switchgears, transformers, motors;
- by the way the switch is operated.
ARSP, ARSC and NSAR are not considered in the work, since they are triggered after a system stability violation.
2.1 Analysis of the efficiency of reclosure for increasing the stocks of dynamic stability
As you know, the restoration of normal operation with successful and unsuccessful reclosure is limited to a possible violation of the dynamic stability of EPS [3].
In the case of a three-phase automatic reclosure on a single power line in the pause mode of automatic reclosure in a power plant or an equivalent generator,
a practically complete power drop occurs, i.e. the active power drops to zero, and at the end of a pause with a successful automatic reclosure the power increases
abruptly due to the transition to the angular power characteristic normal initial mode. When performing a practical criterion of dynamic stability, based
on the area rule
, the generator after several cycles of swings again operates in normal mode. In case of unsuccessful TPAR, the generator will generate and
give out active power in accordance with the emergency mode characteristic.
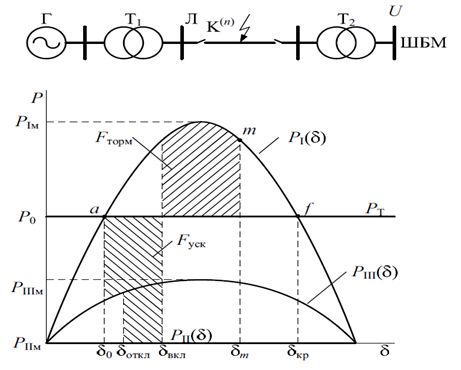
Figure 1 – Successful TPAR on a single-circuit power line
In case of unsuccessful TPAR, the power transmission line is again disconnected for a long time and in this case the stability of the single-transmission line system does not make sense.
In the incomplete phase mode with the OPAR, the angular power characteristic of the generator has a sufficiently large maximum. The process of deceleration of the rotor begins, which occurs in a mode with one phase disconnected (Fig.2).
With a successful OPAR, a transition to a normal power characteristic takes place and we see the process of restoring the original steady state.
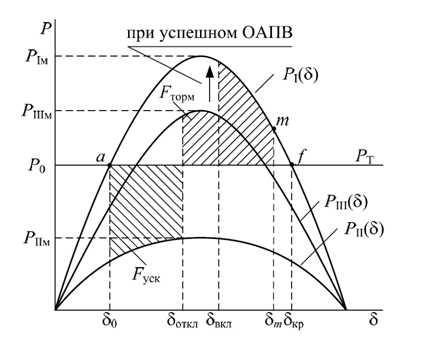
Figure 2 – Successful OPAR on a single-line power line
In case of unsuccessful OPAR, a three-phase disconnection of the damaged line is performed and communication of the power station with the receiving power system is lost.
In the case of an unsuccessful automatic reclosure, the stability conditions deteriorate significantly compared to the case of failure to apply the automatic reclosure [4]. The case when an unsuccessful TPAR results in a violation of dynamic stability, while it could be provided in the event of a failure of the automatic reclosure, is shown in Fig.4.
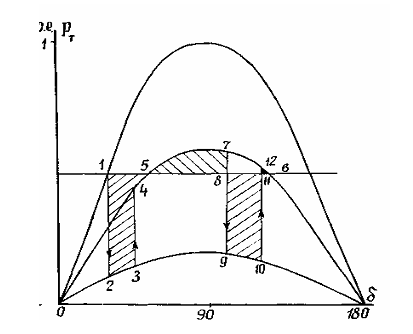
Figure 4 - Evaluation of CDS of EPS with unsuccessful TPAR
3. General characteristics of EB
Electric braking of generators (EB) is a means of emergency control that provides a control action of impulse type and is carried out by means of the inclusion of resistors in the electrical circuit. The activation of the resistors can be done in parallel or in series [5].
3.1 Analysis of the effectiveness of EB for increasing the stocks of dynamic stability
To explain the principle of the operation of EB and methods for switching on or switching off resistances, we consider the moment-angular characteristics of Fig.5,
which considers the attenuation of the connection as a result of disconnection of the power line during short-circuit on it. Upon reaching a certain value of the
angle δin, which corresponds to the moment when the resistance of the EB is switched on (Fig.5,a), the Pm changes and the transition to another moment-angular
characteristic r
with a lowered maximum power Pm occurs [6].
When the shut-off angle δout is reached, the resistor turns off and the reset to the initial (normal) value and characteristic B
begins.
If the electric braking has a short duration (tout – tin
With excess ET duration (tout – tin > tmax) there will be a failure of stability in the second cycle of oscillations. To explain this case, Fig.5,b we considered the option of disconnecting the resistor at δout < δin, i.e. after passing not only the maximum angle δ, but also the angle value, the motor was switched on [7].
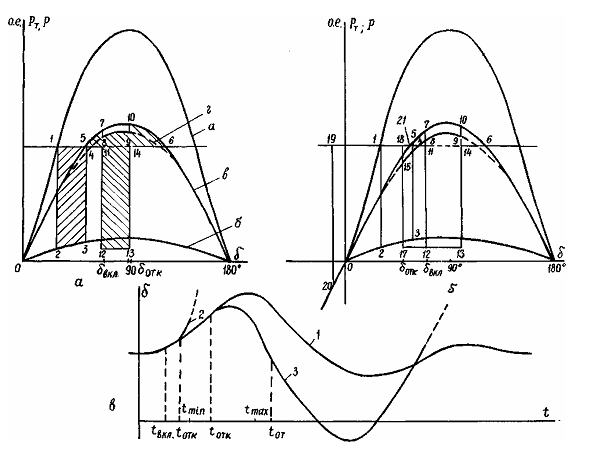
Figure 5 - Moment angular characteristics with EB
4. Software environment for payments
Calculations of the thesis were made in MathCAD. This software allowed performing numerical and analytical calculations, plotting angular-angular characteristics using various methods of emergency control, as well as evaluating the stability of the system after heavy disturbances.
Conclusion
The developed software allows to estimate the dynamic stability of the system when using a switching type AA. The research makes it possible to evaluate the settings of automatic reclosure and EB in various emergency situations with large disturbances.
References
- Кощеев, Л. А. Автоматическое противоаварийное управление в электроэнергетических системах / Л. А. Кощеев. – Изд-во УДК 621.311/621.316 – с. 94-96.
- Глускин, И. З. Противоаварийная автоматика в энергосистемах / И. З. Глускин, Б. И. Иофьев, А. А. Меклина, Л. Н. Чекаловец. – М.:
Знак
. 2009. – 568 с. - Хрущев, Ю. В. Электромеханические переходные процессы в электроэнергетических системах: учебное пособие / Ю. В. Хрущев, К. И. Заподовников, А. Ю. Юшков; Томский политехнический университет. – Томск: Изд-во Томского политехнического университета, 2010. – 160 с.
- Веников, В.А. Переходные электромеханические процессы в электрических системах / В. А. Веников. – М.: ВШ, 1985. – 536 с.
- Овчинников, В. В. Библиотека электромонтера. Автоматическое повторное включение / В. В. Овчинников. – М. Энергоатомиздат 1987 – 410 с.
- Колесник, Г.П. Переходные электромеханические процессы в электроэнергетических системах : учеб. пособие / Г. П. Колесник; Владим. гос. ун-т. – Владимир : Изд-во Владим. гос. ун-та, 2008. – 116 с.
- Жданов, П. С. Вопросы устойчивости электрических систем / П. С. Жданов. – Изд-во М., Энергия, 1979. – 456 с.