
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Цілі та завдання
- 2. Призначення та класифікація АПВ
- 2.1 Аналіз ефективності АПВ на підвищення запасів динамічної стійкості
- 3. Загальна характеристика ЕГ
- 3.1 Аналіз ефективності ЕГ на підвищення запасів динамічної стійкості
- 4. Програмне середовище для розрахунків
- Висновки
- Перелік посилань
Вступ
Останнім часом простежується прагнення до об'єднання енергосистем. В цьому є ряд переваг, таких як: ефективне використання ресурсів енергетики, підвищення економічної вироблення електричної енергії, зменшення сумарної встановленої потужності електростанцій об'єднаних енергосистем, збільшення єдиної потужності агрегатів, підвищення надійності і стійкості системи за рахунок резервування і ПА, підвищення маневреності в енергосистемах, розвантаження магістральних ЛЕП, ймовірність приєднання нових споживачів, скорочення чисельності ремонтного персоналу і автоматизація вирообничих процесів.
Але при всіх цих плюсах, об'єднання енергосистем має і ряд недоліків. До них відносяться: ускладнення релейного захисту, автоматики і управління режимами. Для усунення цих недоліків потрібен розвиток методів оптимізації режимного управління і максимальне підвищення ефективності автоматичного протиаварійного керування. Сфера застосування протиаварійного керування це, перш за все, електромеханічні перехідні процеси в аварійних режимах.
1. Цілі та завдання
Метою цієї роботи є оцінка ефективності і обгрунтування застосування в електроенергетичних системах різних видів АПВ та електричного гальмування генераторів як засобів протиаварійної автоматики комутаційного типу.
Для досягнення поставленої мети повинні бути вирішені наступні завдання:
- Виконано аналіз існуючих способів АПВ на одиночних і двоколових лініях з двостороннім живленням, що зв'язують передавальну і приймальню частини ЕЕС.
- Виконано аналіз властивостей електричного гальмування генераторів.
- Розроблений комплекс програм для розрахунку перехідних процесів при збуреннях, викликаних різними видами коротких замикань, їх усунення та повторного включення для можливих випадків успішного або неуспішного АПВ, а так само виконаний розрахунок перехідних процесів при ЕГ генераторів, при послідовному і паралельному включенні активних опорів в електричный ланцюг.
- Виконано аналіз за оцінкою ефективності застосування АПВ та ЕГ генераторів як засобів протиаварійного керування ЕС, спрямованих на підвищення запасів динамічної стійкості електроенергетичних систем.
Основними цілями протиаварійного керування є забезпечення необхідного рівня надійності електропостачання споживачів і живучості енергосистеми [1].
2. Призначення та класифікація АПВ
Основним призначенням АПВ є відновлення роботи об'єкта ЕС: споживача, ділянки ЛЕП, ділянки ПС або електродвигуна [2].
АПВ класифікуються за такими основними ознаками:
- по кратності дії (одноразові та багаторазові);
- по числу фаз, що вмикаються;
- по виду обладнання, що вмикається – АПВ ЛЕП, шин розподільних пристроїв, трансформаторів, двигунів;
- за способом впливу на привід вимикача.
АПВОС, АПВУС і НАПВУ в роботі не розглядаються, так як вони спрацьовують після порушення стійкості системи.
2.1 Аналіз ефективності АПВ на підвищення запасів динамічної стійкості
Як відомо, відновлення нормальної роботи при успішних і неуспішних АПВ обмежується можливим порушенням динамічної стійкості ЕЕС [3].
При трифазному АПВ на одиночній ЛЕП в режимі паузи АПВ на електростанції або еквівалентному генераторі відбувається практично повне скидання потужності,
тобто активна потужність падає до нуля, а після закінчення паузи при успішному АПВ потужність стрибком збільшується в зв'язку з переходом на кутову характеристику
потужності нормального вихідного режиму. При виконанні практичного критерію динамічної стійкості, заснованого на правилі площ
, генератор після декількох циклів
хитань знову працює в нормальному режимі. У разі неуспішного ТАПВ генератор буде виробляти і віддавати активну потужність відповідно до характеристики аварійного режиму.
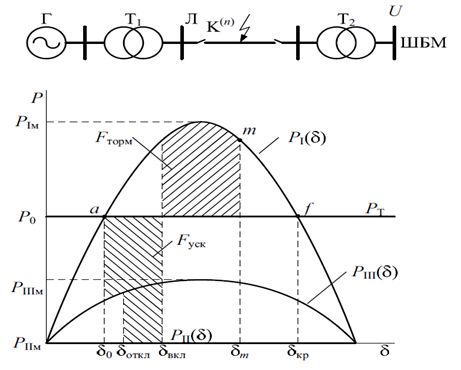
Рисунок 1 – Успішне ТАПВ на одноланцюговій ЛЕП
При неуспішному ТАПВ ЛЕП знову відключається на тривалий час і в цьому випадку забезпечення стійкості системи одиночній ЛЕП не має сенсу.
У неповнофазному режимі при ОАПВ кутова характеристика потужності генератора має досить великий максимум. Починається процес гальмування ротора, який відбувається в режимі з відключеною однією фазою (рис.2).
При успішному ОАПВ відбувається перехід на характеристику потужності нормального режиму і ми бачимо процес відновлення вихідного усталеного режиму.
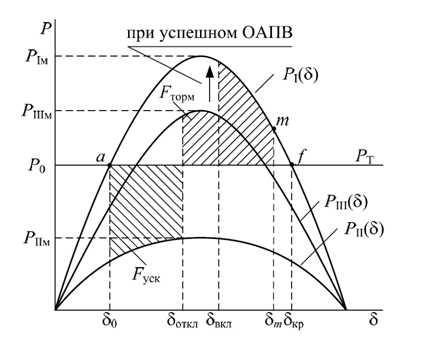
Рисунок 2 – Успішне ОАПВ на одноланцюговій ЛЭП
При неуспішному ОАПВ здійснюється трифазне відключення пошкодженої лінії і зв'язок електричної станції з приймальні енергосистемою втрачається.
У разі неуспішного АПВ умови стійкості істотно погіршуються в порівнянні з випадком відмови від застосування АПВ [4]. Випадок, коли неуспішне ТАПВ призводить до порушення динамічної стійкості, в той час як вона могла бути забезпечена при відмові від АПВ, наведено на рис.4.
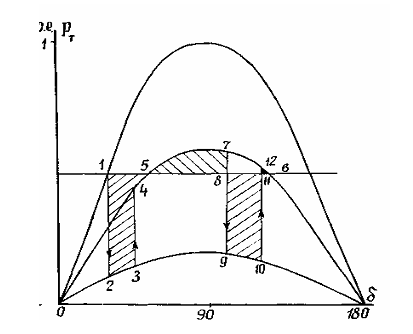
Рисунок 4 – До оцінки СДУ ЕЕС при неуспішному ТАПВ
3. Загальна характеристика ЕГ
Електричне гальмування генераторів (ЕГ) – це засіб протиаварійної автоматики, що забезпечує управлінський вплив імпульсного типу і здійснюється за допомогою включення в електричний ланцюг резисторів. Включення резисторів можна робити паралельно або послідовно [5].
3.1 Аналіз ефективності ЕГ на підвищення запасів динамічної стійкості
Для пояснення принципу роботи ЕГ і способів включення або відключення опорів розглянемо моментно-кутові характеристики рис.5, на якому розглядається
ослаблення зв'язку в слідстві відключення лінії електропередач при КЗ на ній. По досягненню певного значення кута δвкл, який відповідає моменту включення
опору ЕГ (рис.5,а), відбувається зміна Рт і перехід на іншу моментно-кутову характеристику г
зі зниженою максимальною потужністю Рт [6].
При досягненні кута відключення δвідкл резистор відключається і починається повернення до вихідного (нормальному) значенням і характеристиці в
.
Якщо електричне гальмування має малу тривалість (tвідкл - tвкл < tmix), то після відключення резистора кут δ може перевищити критичне значення, яке відповідає точці 6. У цьому випадку в першому циклі буде порушення стійкості системи.
При надмірної тривалості ЕГ (tвідкл - tвкл > tmax) відбудеться порушення стійкості в другому циклі хитань. Для пояснення цього випадку на рис.12,б розглянуто варіант відключення резистора при δвідкл < δвкл, тобто після проходження не тільки максимуму кута δ, а й значення кута, при якому було здійснено включення [7].
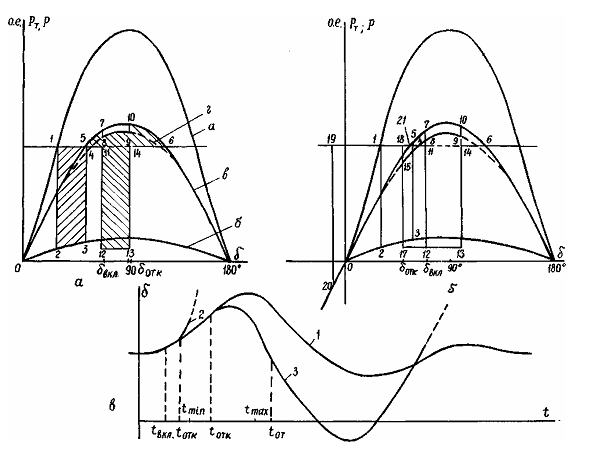
Рисунок 5 – Моментно-кутові характеристики при ЕГ
4. Програмне середовище для розрахунків
Розрахунки дипломної роботи проводилися в MathCAD. Це програмне забезпечення дозволило виконати чисельні і аналітичні обчислення, побудувати графіки моментно-кутових характеристик при використанні різних способів протиаварійних управлінь, а так само оцінити стійкість системи після важких збурень.
Висновки
Розроблене програмне забезпечення дозволяє оцінити динамічну стійкість системи при використанні ПА комутаційного типу. Дослідження дає можливість оцінити параметри налаштування АПВ та ЕГ в різних аварійних ситуаціях при великих збуреннях.
Перелік посилань
- Кощеев, Л. А. Автоматическое противоаварийное управление в электроэнергетических системах / Л. А. Кощеев. – Изд-во УДК 621.311/621.316 – с. 94-96.
- Глускин, И. З. Противоаварийная автоматика в энергосистемах / И. З. Глускин, Б. И. Иофьев, А. А. Меклина, Л. Н. Чекаловец. – М.:
Знак
. 2009. – 568 с. - Хрущев, Ю. В. Электромеханические переходные процессы в электроэнергетических системах: учебное пособие / Ю. В. Хрущев, К. И. Заподовников, А. Ю. Юшков; Томский политехнический университет. – Томск: Изд-во Томского политехнического университета, 2010. – 160 с.
- Веников, В.А. Переходные электромеханические процессы в электрических системах / В. А. Веников. – М.: ВШ, 1985. – 536 с.
- Овчинников, В. В. Библиотека электромонтера. Автоматическое повторное включение / В. В. Овчинников. – М. Энергоатомиздат 1987 – 410 с.
- Колесник, Г.П. Переходные электромеханические процессы в электроэнергетических системах : учеб. пособие / Г. П. Колесник; Владим. гос. ун-т. – Владимир : Изд-во Владим. гос. ун-та, 2008. – 116 с.
- Жданов, П. С. Вопросы устойчивости электрических систем / П. С. Жданов. – Изд-во М., Энергия, 1979. – 456 с.