
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Актуальність теми
- 2. Види і причини виникнення неврівноваженості роторів
- 2.1 Види неврівноваженості роторів
- 2.2 Причини виникнення неврівноваженості роторів
- 3. Методи та засоби урівноваження (балансування) роторів
- 3.1 Методи врівноваження (балансування) роторів
- 3.2 Статичнє урівноваження
- 3.3 Динамічне урівноважування
- 3.4 Урівноважування роторів у власних опорах
- 3.4.1 Метод амплітуд (метод трьох пусків)
- 3.4.2 Метод амплітуд і фаз
- 4. Одно- і двоплощиннє балансування
- 4.1 Балансування в одній площині
- 4.2 Балансування в двох площинах
- 4.3 Вибір точок вимірювання і площин корекції.
- Высновки
- Список джерел
Вступ
В даний час розроблено безліч різноманітних методик динамічного балансування. Принцип їх в загальному однаковий. Різниця в основному полягає у врахуванні конкретних особливостей об'єктів балансування, конкретних технічних засобів вібровимірювань і наявності обчислювальної техніки. Часто відмінність методик визначається вибором критерію, за яким оцінюються результати балансування: - мінімізація СКЗ залишкових рівнів вібрації; - мінімізація середніх залишкових рівнів вібрації; - мінімізація найбільшого з рівнів вібрації по точках контролю і т.д. Однак, у всіх випадках, будь-яка методика балансування грунтується на одному допущенні, прийняття якого дозволяє як розробляти теоретичні аспекти завдання, так і дає можливість практично здійснювати балансування в загальному будь-яких роторних механізмів. Суть допущення - в припущенні лінійності коливальні системи відносно.[1 ].
1. Актуальність темы
Однією з особливостей сучасного технічного прогресу є систематичне зростання робочих швидкостей обертання роторів машин, приладів і механізмів. Наприклад, частота обертання роторів центрифуг доходить до 500 тис. Об / хв, а деяких деталей текстильних машин - до 1 млн. Об / хв. Цілком природно, що зі збільшенням швидкостей обертання виникають і підвищені вібрації.
Вібрації, що виникають при роботі машин і механізмів, створюють додаткові навантаження на деталі, збільшують їх знос, знижують термін служби виробів, надають несприятливий фізіологічну дію на організм людини. Руйнування опор і фундаментів машин, підвищений знос автомобільних шин, неякісне відтворення магнітофонного запису - все це і багато іншого в більшості випадків пов'язано з високим рівнем вібрації. Тому боротьба з шкідливими вібраціями - актуальна проблема сучасного машинобудування і приладобудування. У той же час, вібрації, які використовуються при роботі формувальних і ливарних машин, при зануренні паль і труб в грунт, при ущільненні бетону і в багатьох інших виробничих процесах, є корисними.
В процесі проектування машин і механізмів прагнуть зменшити шкідливі вібрації, вибираючи найбільш правильні рішення щодо конструкції і технології виготовлення, домагаються ваговій симетрії всіх рухомих частин шляхом врівноваження. Однак, в процесі виготовлення і експлуатації деталей і вузлів виникають умови, що порушують симетрію і призводять до неврівноваженості. Для зменшення неврівноваженості при виготовленні, ремонті, експлуатації виробляють балансування тіл обертання шляхом зміни їх маси або геометрії.
Належна балансування деталей автомобіля подовжує термін служби на 25-100%, підвищує корисну потужність двигуна на 10%. Балансування збільшує в 3 рази стійкість алмазних кіл, знижує в 4 рази хвилястість оброблюваної поверхні. Подібні приклади можна привести для виробів та інших галузей машинобудування. Спочатку урівноваження обертових мас проводилося лише розрахунковим шляхом при конструюванні. Необхідність і динамічному балансуванню як операції технологічного процесу виготовлення виникла в зв'язку з впровадженням високооборотних парових турбін. Перші балансувальні верстати з'явилися в Росії, Швейцарії та Німеччини в кінці XIX початку XX ст.
Бурхливий розвиток машинобудування і приладобудування в середині нашого століття вимагало вирішення багатьох питань балансування техніки. Була розпочата розробка питань теорії балансування роторів, врівноваження механізмів; створені верстати для балансування деталей масою від декількох грамів до сотень тонн, високопродуктивні балансувальні автомати і автоматичні лінії. Балансування космічних літальних апаратів проводиться з мінімальною швидкістю обертання до 30 об / хв, а центрифуг - при швидкості обертання 12000 об / хв. [2 ]
2. Види і причини виникнення неврівноваженості ротора
Неврівноваженість ротора механічного походження викликається виникненням (в силу різних причин) відхилень робочих геометричних розмірів ротора від номінальних конструктивних, тобто дисбалансу. При обертанні такого ротора з деякою кутовою швидкістю в кожному поперечному перерізі, що має відхилення розмірів від номінальних, виникає відцентрова сила, що обертається разом з ротором і викликає змінні навантаження на опори. При цьому для спостерігача результуюча відцентрова сила обертається, як і її окремі складові, але для ротора вона нерухома і є статичним навантаженням, яка може викликати значний вигин. [3 ]
2.1 Види неврівноваженості роторів
Неврівноваженість ротора - стан ротора, що характеризується таким розподілом мас, при якому в опорах виникає знакозмінна навантаження. Види неврівноваженість: статична, моментна, динамічна.
Статична неврівноваженість - це стан ротора, при якому вісь ротора і його центральна вісь інерції паралельні, тобто центр мас ротора зміщений від його осі, що викликає відцентрову силу. Величину неврівноваженості ротора оцінюють головним вектором статичного дисбалансу. Для усунення статичної неврівноваженості по лінії дії встановлюють коригувальну масу на відстані від осі обертання. Ця коригуюча маса створює дисбаланс. В результаті врівноваження головна центральна вісь інерції повинна збігтися з віссю обертання.
Моментна неврівноваженість - характеризується тим, що центр мас ротора розташований на осі його обертання, головна центральна вісь інерції повернута відносно осі обертання на деякий кут. Моментна неврівноваженість проявляється тільки при обертанні ротора, у вигляді биття в опорах, при цьому виникає динамічний момент. Для усунення моментної неврівноваженості вибирають в довільному місці дві коригувальні площині.
Динамічна неврівноваженість - є загальним випадком неврівноваженості ротора, а саме, має місце як статична, так і моментальна неврівноваженості. При цьому центр мас ротора не лежить на осі обертання, і головна центральна вісь інерції повернута на кут щодо осі обертання [4 ]
2.2 Причини виникнення неврівноваженості роторів
Вплив відцентрових сил, або дисбалансу, на опори в великій мірівизначається динамічними властивостями ротора, тобто його здатністю до зміни форми при обертанні. Механічний, або "жорсткий", дисбаланс - один з основних джерел підвищеної вібрації обладнання. Причини його виникнення можна розділити на дві групи. Перша з них - це дефекти, пов'язані з порушенням технології виготовлення, складання і балансування ротора після складання, з заміною або перестановкою деталей в процесі монтажу, що характеризуються підвищеною вібрацією безпосередньо по завершенні ремонту або монтажу обладнання. Інша група-дефекти експлуатації, такі як руйнування і "виліт" частин ротора (наприклад, частин робочого диска, лопаток та ін.) В процесі роботи, що характеризуються раптовими однократними стрибкоподібними змінами амплітуди і / або фази вібрації, і різні види зносу поверхонь ротора ( наприклад, що труться і робочих шийок вала, лопастей коліс), відкладення в процесі роботи, зменшення натягу (порушення посадок) деталей валу, в більшості випадків характеризуються порівняно повільними (протягом годин, днів, місяців і більше) змінами амплітуди і / або фази вібрації.[5 ]
3. Методи та засоби урівноваження (балансування) ротора
Для балансування роторів потрібно вирішити два завдання знайти неврівноважену масу і знайти місце установки корегуючої маси.
3.1 Методи врівноваження (балансування) роторів
Методи балансування класифікують за рядом ознак: за призначенням -балансіровка деталей, жорстких, квазігібкіх і гнучких роторів в зборі, роторів на місці установки; по частоті обертання ротора при балансуванні - без обертання деталі, низькочастотна і високочастотна балансування; за кількістю площин корекції - одно-, дво- і багатоплощинна балансування; по вимірюваному параметру при балансуванні з вимірюванням амплітуди, фази, амплітуди і фази переміщення, віброшвидкості, віброприскорення, зусилля в опорах, напруг в роторі; по числу вимірюваних параметрів при балансуванні один, два, більше двох параметрів; за способом коригування мас - додаванням, зменшенням або переміщенням коригувальних мас; за способом знаходження залежності дисбалансів в площинах корекції від Реальні показники можуть відрізнятися - експериментальний (метод пробних пусків), розрахунковий, експериментально-розрахунковий. [6 ]
3.2 Статичнє урівноваження
Статичне балансування - балансування, при якій визначається і зменшується головний вектор дисбалансів ротора, що характеризує його статичну неврівноваженість. Головний вектор дисбалансів ротора можна визначити за допомогою сили тяжіння на не обертається роторі або на роторі в динамічному режимі. В усталеному становищі момент сил ваги щодо поздовжньої осі дорівнює нулю. Нижня точка показує кут дисбалансу в системі координат, пов'язаної з ротором, або, як кажуть, важке місце ротора. Щоб збалансувати ротор, його необхідно повернути на 90 ° і привести важке місце в горизонтальну площину. У протилежній точці потрібно встановити коригувальну масу, яка створює момент сили тяжіння. Для визначення головного вектора дисбалансів можна використовувати і інші рухи ротора; поворот навколо нерухомої осі ротора, переміщення осі ротора відносно нерухомої осі або точки, переміщення осі ротора в просторі. Значення корегуючої маси при статичної балансуванню знаходять розрахунковим і експериментальним методами.
3.3 Динамічне урівноважування
Динамічно неврівноважений ротор при балансуванні розглядають як повністю збалансований ротор, в площинах корекції якого прикріплені точкові неврівноважені маси. При обертанні такого ротора з постійною кутовою швидкістю навколо нерухомої осі виникають змінні навантаження на опорах ротора і вигин його осі. Навантаження на опорах ротора пропорційні дисбалансів у всіх площинах корекції
Для жорсткого ротора досить виміряти навантаження або вібрації опор на постійній частоті обертання для того, щоб визначити головний вектор і головний момент дисбалансів або два вектора дисбалансів. Ці вектори в загальному випадку різні за значенням і непаралельних, лежать в двох довільних площинах, перпендикулярних осі ротора, і повністю визначають його динамічну неврівноваженість. Коригування мас також досить провести на двох площинах.
Дисбаланси гнучкого ротора, що визначають неврівноваженість по n-й формі вигину, визначають на частотах обертання, близьких до відповідної n-й власній частоті згинальних коливань системи ротор-опори, т. Е. На частотах обертання, при яких виникають деформації пружної лінії, характерні для n-ї форми вигину. Коригування мас проводять у багатьох площинах, перпендикулярних осі ротора, по кожній формі вигину. Процес динамічного балансування складається з наступних етапів. На постійній частоті обертання вимірюють навантаження або вібрації опор динамічно неврівноваженого ротора. За результатами вимірювань вібрацій опор шляхом розрахунку або експериментально знаходять балансувальні чутливості і дисбаланси в площинах виміру. зазвичай площині виміри збігаються з площинами опор ротора. Розраховують дисбаланси в заданих площинах корекції, значення і кути коригувальних мас. Проводять коригування мас ротора відповідно до вимог технічної документації. Залежно від заданої точності балансування, класу ротора, що застосовується устаткування і багатьох інших факторів використовують різні методи динамічного балансування. [7 ]
3.4 Урівноважування роторів у власних опорах
3.4.1 Метод амплітуд (метод трьох пусків)
Для визначення значення і кута початкового дисбалансу в площині корекції за цим методом вимірюють амплітуди коливань однієї опори при обертанні ротора з різна розташованими пробними вантажами. Окружність ротора в площині корекції ділять на вісім рівних частин 1,2, ... 8. У точці 1 прикріплюють пробний вантаж на радіусі rk і на постійній частоті обертання ротора вимірюють амплітуду коливань опори U1, Переставляючи пробний вантаж на тому ж радіусі на 45 °, знову вимірюють амплітуду коливань опори U2. Вимірювання повторюють пріразлічних положеннях пробного вантажу, поки не буде обійдена вся окружність ротора. В результаті отримують вісім значень амплітуд коливань опори U1, U2, ..., U8. У масштабі будують графік в координатах місць установки пробного вантажу і амплітуд коливань опори. Верхня точка отриманої кривої Uмакс вказує важке місце - кут початкового дисбалансу щодо 1-й точки, нанесеною на роторі, а нижня точка кривої Uмін вказує легке місце. Максимальна амплітуда коливань опори Uмін пропорційна сумі початкового дисбалансу і дисбалансу, створюваного пробної масою, а мінімальна амплітуда коливань опори пропорційна різниці цих дисбалансів. Масу пробного вантажу беруть не менше 50% від передбачуваної неврівноваженої маси ротора. У той же час відцентрова сила від пробного вантажу не повинна перевищувати 20% сили тяжіння ротора, що припадає на найближчу опору.
Спосіб трьох пусків дозволяє визначити значення і кут початкового дисбалансу або коректує маси за результатами вимірювання амплітуд коливань опори при трьох пусках ротора з пробним вантажем, який встановлюють в три довільні точки окружності ротора в площині корекції.
Окружність ротора ділять, як правило, на три рівні частини 1,2,3. Спочатку вимірюють амплітуду коливань опори U0 ротора без пробного вантажу, т. Е. Ротора з початковим дисбалансом. Потім пробну масу послідовно прикріплюють в точках 1,2,3 і кожен раз вимірюють амплітуди коливань опори U1, U2, U3. [8 ]
3.4.2 Метод амплітуд і фаз
Цей метод передбачає одночасне вимірювання амплітуди (віброметри) і фази коливань (стробоскопом) опори при балансуванні ротора. При одноплощинної балансуванню теоретично досить двох пусків ротора: перший пуск ротора з початковим дисбалансом і другий пуск ротора з пробної масою.
На постійній частоті обертання вимірюють амплітуду U0 і фазу ?0 коливань опори ротора з початковим дисбалансом. Потім в довільній точці на колі ротора в площині корекції прикріплюють пробну масу mпр і на тій же частоті обертання знову вимірюють амплітуду U1 і фазу ?1 коливань опори.[9 ]
4. Одно- і двоплощиннє балансування
Кількість площин балансування визначається з урахуванням конструктивних особливостей ротора балансованої машини.
4.1 Балансування в одній площині
Балансування в одній площині ( "статична") зазвичай виконується для вузьких дископодібних роторів, що не мають істотних осьових биття.
Типовими прикладами роторів цього класу є:
- Вузькі шліфувальні круги.
- Шківи ремінних передач.
- Діскові маховики.
- Зубчасті колеса.
- Зажимні патрони токарних верстатів.
- Вузькі вентилятори і т.д.
4.2 Балансування в двох площинах
Балансування в двох площинах ( "динамічна") виконується для довгих (валообразних) двох - опорних роторів.
Типовими прикладами роторів цього класу є:
- Ротори електродвигунів і генераторів.
- Ротори компресорів і насосів.
- Робочі колеса турбін і вентиляторів.
- Широкі шліфувальні круги.
- Шпінделі.
- Вал борошномельних машин з бичами і т.д.
4.3 Балансування в двох площинах
Выбор точек измерения и плоскостей коррекции.
В якості точок вимірювання вібрації вибирають переважно корпусу підшипникових опор. При балансуванні в одній площині достатня одна точка вимірювання

Малюнок 1 – Вибір точки вимірювання і площині корекції при балансуванні в одній площині.
Малюнок 2 – Вибір точок вимірювання і площин корекції при балансуванні в двох площинах в разі симетричного ротора (анімація: 7 кадрів, 10 повторень, 69 кілобайт).
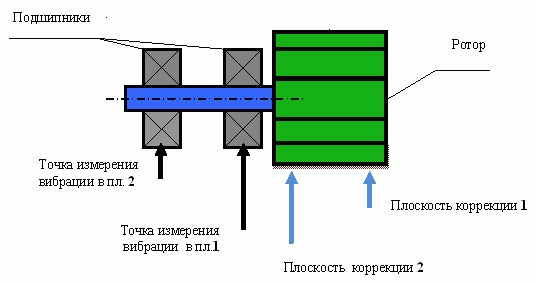
Малюнок 3 & ndash; Вибір точок вимірювання і площин корекції при балансуванні в двох площинах в разі консольного ротора.
При балансуванні в двох площинах необхідно мати дві точки виміру. Площині корекції, в яких здійснюється знімання (установка) коригувальних мас на роторі, повинні вибиратися якомога ближче до точок вимірювання. У разі балансування в двох площинах корекції відстань між площинами має вибиратися найбільше. [10 ]
Висновки
Магістерська робота присвячена дослідженню способів балансування роторних машин і обгрунтування їх використання для обладнання хімічних підприємств. При написанні даного реферату магістерська робота ще не завершена. Остаточне завершення: червень 2018 року. Повний текст роботи та матеріали по темі можуть бути отримані у автора або його керівника після зазначеної дати.
Список джерел
- Ширман А.Р., Соловьев А.Д. Практическая вибродиагностика и мониторинг состояния механического оборудования. – Москва, 1996. – 276 с.
- Левит М.Е., Рыженков В.М. Балансировка деталей и узлов. – М.: Машиностроение, 1986. – 248 с.
- Основы балансировочной техники. Том 1,2. Под ред. В.А. Щепетильникова. – М.: Машиностроение, 1975.
- Справочник по балансировке / Под общей редакцией М.Е. Левита. – М.: Машиностроение, 1992. – 464 с.
- Гольдин А.С. Вибрация роторных машин: 2-е изд. исправл. – М.: Машиностроение, 2000. – 344 с.
- Динамика и балансировка гибких роторов. Под ред. А.А. Гусаров - М.: Наука, 1990 — 152 с.
- Вибрации в технике: Справочник. В 6-ти т. / Ред. совет: В.Н. Челомей (председатель). – М.: Машиностроение, 1981. – Т.6. Защита от вибрации и ударов / Под ред. К.В. Фролова, 1981. – 456 с.
- Спектральная вибродиагностика .В.А.Русов Русов – 1996.
- Кравченко В.М., Сидоров В.А., Седуш В.Я. Технічне діагностування механічного обладнання: підручник. – Донецьк: ТОВ "Юго-Восток, Лтд", 2007. – 447 с
- Балансировка роторов. Методическое пособие. В.К. Ковалев – 2016