
Реферат
Содержание
- Введение
- 1. Актуальность темы
- 2. Цель и задачи исследования, планируемые результаты
- 3. Описание конструкции
- 4. Обзор исследований и разработок
- Выводы
- Список источников
Введение
Конверторный
способ
производства является одним из основных способов получения стали и
неотъемлемой
частью современной металлургической промышленности. Задачей
качественного
производства стали является уменьшение количества шлака, которое
попадает в
сталеразливочный ковш. Существуют различные способы отсечки
конвертерного
шлака: газодинамическая отсечка, с использованием шиберных затворов
различных
типов, с использованием отсечных элементов.
1. Актуальность темы
Рассмотрим
способ с
применением отсечных элементов поплавкового типа. Для их ввода в ванну
кислородного конвертера применяют специальные манипуляторы. Наибольшее
распространение получили конструкции фирм «Monocon International Refractories Ltd.»
(http://www.monocon.info)
и «Yuntian Metallurgy Technology Co.,
Ltd.»
(http://ytslagstopper.com). Такое
множество конструктивных исполнений характеризуется производственными и
технологическими особенностями рабочих площадок кислородных конвертеров.
2. Цель и задачи исследования, планируемые результаты
На
основе анализа анализа конструктивных особенностей
существующих манипуляторов:
1)
разработать конструкцию с минимальным
количеством приводов;
2)
разработать универсальную конструкцию
манипулятора, для различных производственных условий;
3)
проанализировать работу манипулятора с
различными вариантами комбинаций приводов;
4)
оценить эффективность применения комбинаций
приводов;
3. Описание конструкции
Конструкция
манипулятора осевого типа для ввода отсечных
элементов в сталевыпускной канал конвертера при выпуске стали показана
на
рисунке 1. Этот манипулятор включает вертикальную колонну 1,
установленную с
возможностью поворота в нижней 2 и верхней 3 неподвижных подшипниковых
опорах и
оснащенную консолью 4, на которой смонтирован подшипниковый узел 5 с
вертикальным валом 6. На нижнем конце этого вала жестко закреплен
кронштейн 7,
имеющий две продольные направляющие, в которых размещены ролики каретки
8,
имеющей возможность перемещения относительно направляющих и несущей
пустотелую
штангу 9. На переднем конце штанги с помощью подпружиненного фиксатора
закреплен отсечной элемент 10. Механизм поворота кронштейна
относительно
консоли включает коническую зубчатую пару 11 передаточным числом,
равным 1,
связывающую вертикальный вал с задним концом горизонтального вала 12,
на
переднем конце которого жестко закреплено коническое зубчатое колесо
13,
имеющее возможность обкатывания по конической зубчатой шестерне 14.
Эта шестерня жестко связана с неподвижной верхней опорой вертикальной колонны. Причем отношение чисел зубьев неподвижной конической шестерни и конического зубчатого колеса составляет 2:1. Указанные соотношения конструктивных элементов конических передач позволяют автоматически обеспечить одновременно при повороте колонны с консолью на угол 90 град, из исходного положения относительный поворот кронштейна на 180 град., в результате чего консоль и кронштейн будут сориентированы в линию и займут соосное положение с кислородным конвертером, кик показано на рисунке 1б. Последующую доставку отсечного элемента в зону расположения сталевыпускного канала конвертера (рис. 1в) осуществляют перемещением каретки с полой штангой относительно кронштейна с помощью цепного привода.
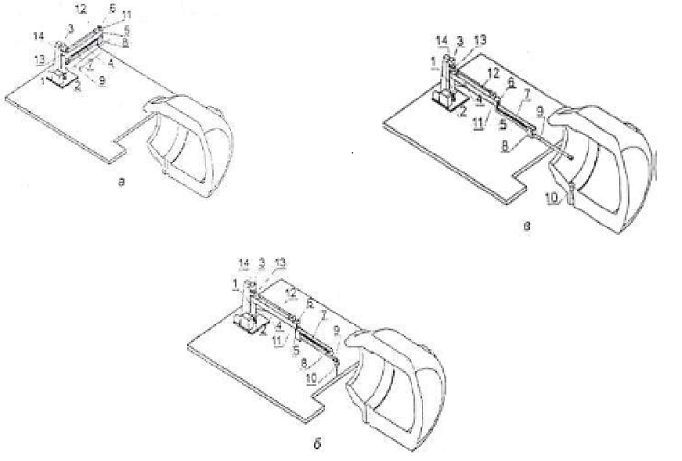
Рисунок 1 - Устройство манипулятора осевого типа и расположение его элементов в исходном (а), промежуточном (б), и конечном (в) положениях
Рисунок
1.1 - Анимация
движения манипулятора осевого типа: кадров - 24; повторений - 5; размер
анимации - 234 кб
4. Обзор исследований и разработок
Манипулятор подвесного типа с кареткой
(рис.2) монтируется на
металлическую конструкцию перекрытия цеха или на специальную раму и не
занимает
пол рабочей площадки. При работе за счет использования рычажной системы
манипулятор опускается в рабочее положение, после чего каретка вводит
штангу с
отсечным элементом в полость конвертера. Данная конструкция имеет в
своем
составе два привода – один для поднятия-опускания манипулятора,
второй для
перемещения каретки со штангой для ее ввода в кислородный конвертер.
Манипулятор пантографного типа (рис.3) монтируется так же на металлическую конструкцию перекрытия цеха. В парковочном положении находится над рабочей площадкой, в рабочее положение приводится в одно движение с использованием одного привода.


Рисунок 2 – Манипулятор с кареткой «Monokon»


Манипулятор бокового типа в состоянии
парковки расположен на рабочей
площадке стационарно, сбоку от кислородного конвертера (рис.4). В
рабочем
положении манипулятор заводит штангу с отсечным элементом с помощью
одного
привода. После операции устройство возвращается в исходное положение.

Рисунок 4 – Манипулятор бокового типа «Monokon»
Манипулятор телескопического типа
располагается напротив кислородного
конвертера и установлен на рабочей площадке стационарно (рис.5), в
своем
составе имеет два привода. При выполнении рабочей операции
телескопическая
штанга заводит отсечной элемент в конвертер. После выполнения операции
по
сбросу отсечного элемента манипулятор поворачивается в парковочное
положение.

Представленная на (рис.6) конструкция является разновидностью телескопического манипулятора, на подвижной тележке. Манипулятор находится на парковочном месте сбоку от конвертера и по команде выкатывается в рабочее положение напротив горловины, телескопическая штанга вводит отсечной элемент в полость кислородного конвертера.

Телескопический манипулятор подвесного типа
(рис.7) крепится к
металлическим конструкциям верхних перекрытий цеха. Устройство имеет в
своем
составе два привода – один для поднятия-опускания манипулятора,
второй приводит
в движение телескопическую штангу для ее ввода в кислородный конвертер.

Разновидность телескопического манипулятора подвесного типа на подвижной тележке (рис.8) требует специальную раму для перемещения тележки манипулятора вдоль кислородного конвертера. Манипулятор приводится в рабочее положение двумя приводами – один для перемещения тележки, второй для раскладывания телескопической штанги.

Манипулятор следующей конструкции (рис.9) изготавливают фирмы «Monocon International Refractories Ltd.» и «Yuntian Metallurgy Technology Co., Ltd.», он представляет собой небольшую кабину с пультом управления внутри и закреплённой на ней штангой с отсечным элементом. Манипулятор располагается напротив конвертера на рельсовом пути, что дает ему возможность подъезжать и отъезжать к конвертору для выполнения операции по сбросу отсечного элемента.


Сотрудниками кафедры «Механическое оборудование заводов черной металлургии им. профессора Седуша В.Я.» (МОЗЧМ) была разработана универсальная конструкция манипулятора для ввода отсечных элементов в ванну кислородного конвертера (рис.10), которая может располагаться как напротив, так и сбоку от конвертера, кроме того может устанавливаться как стационарно, так и на подвижной тележке.


Выводы
Таким образом, анализируя
конструктивные особенности манипуляторов зарубежных фирм, можно
выделить ряд
отличительных признаков:
1)Каждый из них в своем
составе имеет как минимум два привода, один – для выхода из
парковочной
позиции, остальные – для осуществления рабочей операции по вводу
штанги с
отсечным элементом в полость кислородного конвертера;
2)Конструкция каждого
манипулятора является индивидуальной, приспособленной под определенные
производственные условия;
3)
Некоторые
конструкции даже
в парковочном состоянии имеют большие габариты;
4)
Ряд
конструкций могут быть
использованы только для вновь построенных конвертерных цехов.
Конструкция манипулятора кафедры
«Механическое оборудование заводов черной металлургии им.
профессора Седуша
В.Я.» обладает меньшей энергоемкостью, меньшими габаритами, и
может быть
использована и адаптирована под различную локацию относительно
кислородного
конвертера.
Список источников
- Опыт разработки систем отсечки шлака для сталеплавильных агрегатов / С.П. Еронько, А.Ю. Цупрун, С.А. Бедарев, С.В. Мечик // «Черметинформация». Бюллетень «Черная металлургия», 2007. – вып. 9, – С. 81 – 87.
- Еронько С. П., Смирнов А.Н., Кукуй Д.П. Разработка эффективных схем отсечки шлака при сливе металла из конвертера // Металлургическая и горнорудная промышленность. - 2003. - №8. - С. 33 – 37.
- Опыт разработки систем отсечки шлака для сталеплавильных агрегатов / С.П. Еронько, А.Ю. Цупрун, С.А. Бедарев и др. // ОАО «Черметинформация». Бюлл. «Черная металлургия» - 2007 - № 9 - С. 81 – 87.
- Исследование напряженно-деформированного состояния звеньев манипулятора для ввода отсечных элементов в выпускной канал конвертера / Еронько С.П., Ошовская Е.В., Бедарев С.А., Мечик С.В. // Металлургическая и горнорудная промышленность. – 2007.– №5. – С. 107 – 111.
- Теплофизические свойства веществ. Справочник / Под ред. Н.Б. Варгафтика. – Л.: Гос.энергетическое изд-во, 1956. – C. 367.
- Использование математического моделирования и САПР при разработке устройства устройства для отсечки конвертерного шлака / С.П. Еронько, Е.В. Ошовская, В.В. Киселев и др. // Прогрессивные технологии и системы машиностроения: Сборник научных трудов - Донецк: ДонГТУ, 2002 - № 23 - С. 52 – 56.
- Исследование напряженно-деформированного состояния звеньев манипулятора для ввода отсечных элементов в выпускной канал конвертера / Еронько С.П., Ошовская Е.В., Бедарев С.А., Мечик С.В. // Металлургическая и горнорудная промышленность. – 2007.– №5. – С. 107 – 111.