
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Актуальность темы
- 2. Цель и задачи исследования, планируемые результаты
- 3. Анализ водоотлива как объекта автоматизации
- 3.1 Технологические группы управления
- 3.2 Технологический процесс откачки воды
- 4. Выбор базовой аппаратуры автоматизации технологического процесса водоотлива
- 4.1 Модернизация аппаратуры автоматизации
- Выводы
- Список источников
Введение
В последнее время в угольной промышленности наблюдается стремление к освоению более глубоких горизонтов, которое дает толчок к созданию новых и усовершенствованию уже имеющихся машин и механизмов для добычи, транспортировки полезных ископаемых, а также водоотлива и вентиляции.
Шахтный водоотлив является одним из важнейших технологических процессов в шахте, от бесперебойной работы которого зависит безопасность работы в условиях шахты. Также, водоотливные установки являются крупными энергопотребителями.
К шахтным насосным агрегатам и прежде всего работающим в условиях отработки месторождений, опасных по газу и пыли, предъявляются повышенные требования в отношении безопасной эксплуатации и защиты окружающей среды. Эти требования учитываются в конструкциях современных новых и модернизированных насосов [1].
1. Актуальность темы
Эксплуатация стационарных шахтных водоотливных установок включает: управление электронасосными агрегатами – пуск и остановку в зависимости от принятой организации работы и контроль за основными параметрами, определяющими режим работы (давление в патрубках, подачу насоса, напряжение и силу тока, питающими электродвигатель, температуру подшипников, расход воды через разгрузочное устройство), техническое обслуживание, проверку и обеспечение нормального состояния узлов, задвижек, обратных клапанов, пусковой и контролирующей аппаратуры, организации и проведении текущих профилактических ремонтов и установления срока направления насосов на заводы для проведения капитального ремонта.
Такое явление, как кавитация, негативно влияет на насосы и процесс водоотлива в целом. Поэтому борьба с ней является важным аспектом в процессе эксплуатации водоотливных установок.
2. Цель и задачи исследования, планируемые результаты
Целью исследования и разработки является повышение эффективности в работе шахтной главной водоотливной установки путем применения системы автоматизации, которая осуществляет контроль и управление работой водоотливной установки.
Требования к системе автоматизации главной водоотливной установки:
- заливка водой насоса и всасывающего трубопровода, и автоматический пуск насосного агрегата в зависимости от уровня воды в водосборнике;
- автоматический останов насосного агрегата в зависимости от уровня воды в водосборнике;
- автоматическое включение дополнительного насоса при достижении аварийного уровня воды или выхода из строя рабочего насоса;
- автоматическое совмещение технологических перерывов в работе водоотлива с установленными периодами максимума электрической нагрузки в энергосистеме;
- контроль заиления предварительного отстойника и автоматическую чистку его гидроэлеваторной установкой;
- автоматический контроль за величиной активной мощности, которую потребляет приводной электродвигатель насоса;
- автоматический контроль за величиной коэффициента полезного действия водоотливной установки;
- автоматический контроль процесса заливки и подачи насоса;
- автоматический контроль температуры подшипниковых узлов насосов;
- возможность передачи информации и сигнализации диспетчеру шахты о состоянии и режиме работы насосного агрегата и уровня воды в водосборнике водоотливной станции.
Выполнение системой автоматизации приведенных требований позволит прогнозировать аварийные ситуации и, как следствие, вовремя устранять аварии, путем отключения насосного агрегата и проведения соответствующих ремонтных работ. Так как работы по предотвращению аварийных ситуаций всегда менее трудоемки, чем работы по ликвидации их последствий, то внедрение системы автоматизации позволит сэкономить часть средств на заработной плате и запасных материалах.
3. Анализ водоотлива как объекта автоматизации
Основными функциями системы управления является запуск, остановка и автоматическое регулирование электронасосных агрегатов в зависимости от уровня воды в водосборнике, которые определяют эффективность откачки воды из шахты.
Заданный верхний уровень является импульсом для подготовки и запуска агрегата в работу, нижний – для остановки.
При работе на приток рациональный уровень воды в водосборнике поддерживается неизменным автоматическим регулированием подачи насоса, равным приливу.
3.1 Технологические группы управления
Можно наметить две группы технологических схем: первая - проточную часть основного насоса перед пуском необходимо заполнить жидкостью, вторая – проточная часть основного насоса всегда заполнена жидкостью.
Согласно технологической группе определяется порядок запуска агрегата: в первой группе перед включением электродвигателя основного насоса необходимо с помощью вспомогательных средств заполнить водой его проточную часть и только после окончания заливки включить электродвигатель; во второй группе при подаче сигнала о запуске агрегата сразу следует включить электродвигатель основного насоса. Таким образом, во второй группе технологических схем упрощенное автоматическое управление электронасосным агрегатом.
Наиболее распространенной является схема, при которой насосная установка 5 (рис. 1, а) находится в камере, расположенной выше уровня воды в водосборнике. Вертикальное расстояние от оси насоса до нижнего уровня жидкости должно быть не более допустимой геометрической высоты всасывания. Определяется она суммой высот центра насоса над почвой камеры hn, разницей отметок почвы камеры и нижнего уровня воды hг.к.
Всасывающий трубопровод 6, оборудованный обратным (приемным) клапаном и решеткой. Клапан 8 препятствует вытеканию воды из проточной части основного насоса при заливке, а решетки охраняют от поступления в трубопровод твердых частиц крупностью большей 0,3 – 0,5 ширины выходной щели рабочего колеса.
На нагнетательном трубопроводе оборудуются задвижка и обратный клапан 2. Назначение обратного клапана – сохранять воду в нагнетательном трубопроводе при простое насосов, не допускать обратного движения воды при останове насосов и защищать насос от гидравлического удара при внеплановом останове. Задвижка, обычно управляемая с электро– или гидравлическим приводом, служит для изменения режимов работы агрегата.
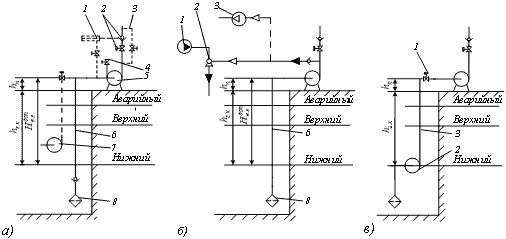
Рисунок 1 – Технологические схемы расположения насосов выше уровня воды в водосборнике
В нерабочий период вода через имеющиеся неплотности в подводящем узле протекает и перед пуском проточная часть основного насоса оказывается незаполненной.
Проточная часть насоса и подводящего трубопровода заполняется двумя принципиально различными способами: подачей воды в насос и в подводящий трубопровод с удалением из них воздуха; созданием вакуума в системе, при этом заполнение водой осуществляется под действием атмосферного давления (рис. 1, б).
При первом способе заполнение водой проточной части основного насоса перед его запуском осуществляется по одной из трех схем: погружным электронасосом 7 (см. рис. 1, а), подающим воду в проточную часть основного насоса; водой из нагнетательного става через пропускное устройство 3 в обход обратного клапана и задвижки 2; водой из постоянно заполненного резервуара 1.
Процессом заливки управляют с помощью запорных устройств, находящихся на трубопроводе. Он может осуществляться автоматически, дистанционно или вручную.
В этой системе обязательно наличие на всасывающем трубопроводе обратного клапана 8.
Воздух в процессе заливки удаляется через выпускное устройство 4 (кран, обратный клапан, вантуз).
Порядок запуска следующий: при получении импульса от датчика верхнего уровня автоматически или вручную включается одно из устройств 1, 3 или 7 и насос заполняется водой. Когда заливка заканчивается, что определяется с помощью реле давления или по времени, включается электродвигатель основного насоса и открывается задвижка на нагнетание.
Преимущества первого способа: удобство, простота технического обслуживания, проведение текущих и профилактических ремонтов, монтажа и демонтажа оборудования с применением механизации.
Недостатки: реальная вероятность возникновения кавитации вследствие значительной геометрической высоты всасывания, увеличение сопротивления на входе (клапан, сетка) при возможном загрязнении сетки; снижение надежности заливки и неопределенность времени заполнения через возможность увеличения утечек через обратный клапан 8 при его заклинивании или загрязнении; усложнение организации запуска основного насоса необходимостью заливки перед пуском путем включения вспомогательных средств.
Второй способ заливки осуществляется созданием вакуума в проточной части основного насоса и подводящем трубопроводе. Вакуум создается струйным вакуум-насосом 2 (рис. 1, б) водокольцевым – 3. Максимальный вакуум соответствует допустимой вакуумметрической высоте всасывания. В этой системе нет необходимости в обратном (приемном) клапане и устройстве для выпуска воздуха.
Преимущества второго способа такие же, как и первого, но еще и повышается надежность заливки, снижается вероятность возникновения кавитации из–за отсутствия на трубопроводе обратного подводящего клапана и поступление в насос воздуха в период нормальной работы через устройство 4 (рис. 1, а).
Недостатки: значительное расстояние от уровня воды до оси насоса, что создает вероятность появления кавитации; усложнение организации запуска основного насоса, так как для предыдущей заливки необходимо включать насос 1 (рис. 1, б) для струйного вакуум-насоса или вакуум–насоса 3, что усложняет управление электронасосным агрегатом.
Если допустимая геометрическая высота всасывания меньше, чем необходимая глубина нижнего уровня воды в водосборнике, или отрицательная, то необходимо применять устройства, которые подкачивают – погружные насосы 2 (рис. 1, в). Подкачивающие устройства выполняют функцию заполнения проточной части основного насоса перед пуском.
3.2 Технологический процесс откачки воды
Технологический процесс откачки воды на поверхность шахты характеризуется такими режимами работы главной водоотливной установки [2]:
- пуск;
- рабочий режим;
- аварийный режим;
- остановка.
Режим пуска начинается с постоянного контроля уровня воды в водосборнике. При достижении водой в водосборнике верхнего допустимого уровня необходимо подготовить водоотливную установку к работе. Для этого надо перед включением насосного агрегата осуществить заливку всасывающего трубопровода 4 и насоса 3 водой. Окончание процесса заливки насоса необходимо контролировать. После заливки необходимо включить насосный агрегат 3 на закрытую задвижку 1 в напорном трубопроводе и открыть ее только после набора насосом номинальных оборотов. В этом случае, когда насос запускается на закрытую задвижку, процесс пуска проходит наиболее благоприятно. Если пуск проходит нормально, то насос принимает нагрузку, в нагнетательном трубопроводе 6 устанавливается номинальное давление, насос работает с заданной производительностью и режим пуска завершается.
В рабочем режиме нужен контроль за процессом откачки воды с помощью контроля различных параметров работы водоотливной установки: гидравлических и электрических. В том числе: уровень воды в водосборнике, заиление предварительного отстойника, давление и подачу насоса, активную мощность, которую потребляет приводной электродвигатель, расход электроэнергии, коэффициент полезного действия водоотливной установки. В случае, когда уровень воды повышается и достигает аварийного уровня, то это означает, что приток воды в водосборник превысил нормальный и подачи одного насоса недостаточно. Тогда необходимо включить параллельно в работу следующий насосный агрегат, повторив перед этим все операции режима пуска, которые были выполнены для первого насоса. Это один из частых случаев аварийного режима работы, который может возникнуть в процессе откачки воды.
Аварийный режим характеризуется проявлением отклонений от нормального режима работы водоотливной установки во избежание негативных явлений и возвращения технологического процесса водоотлива к рабочему режиму. К аварийному режиму могут привести ряд обстоятельств: перегрев подшипников насоса или приводного электродвигателя, снижение производительности насоса, снижение давления в трубопроводе, достижение водой аварийного уровня в водосборнике. В этих случаях, кроме последнего, насосный агрегат отключается и к работе вступает резервный.
Аварийный режим может возникнуть и в процессе пуска. Если после включения приводного электродвигателя в сеть насос не развивает номинальное давление или номинальную подачу, то задвижка закрывается и электродвигатель отключается от сети, после чего осуществляется запуск второго насосного агрегата.
Если процесс откачки идет нормально, то уровень воды снижается до контролируемого нижнего уровня. При его достижении надо закрыть задвижку и отключить насосный агрегат.
4. Выбор базовой аппаратуры автоматизации технологического процесса водоотлива
Для контроля уровня воды в водосборнике в состав системы автоматизации принимаем электродные датчики типа ЭД [3].
Важным показателем отклонения режима работы насосов от нормального является подача, то есть ее изменение. Исследования показывают, что при потерях напора в трубопроводе от 5 до 15% от геометрической высоты контроль подачи по давлению при применении технических манометров дает погрешность до 50% [4]. Для системы автоматизации принимаем реле подачи типа РПН в качестве контроля расхода воды.
Для автоматического контроля заливки водой насоса используют мембранные реле. Для этой цели принимаем реле РДВ [3]. Чувствительным элементом реле является мембрана. Мембрана принимает давление столба воды и передает его через шток на микропереключатель. Преимуществами реле мембранного типа являются: высокая чувствительность, быстрое реагирование на смену разряжения в всасывающем трубопроводе, экономичность в изготовлении и длительный межремонтный срок.
Для автоматического контроля перегрева подшипниковых узлов насосов и двигателей в водоотливных установках применяют температурные реле. Для этой цели применяем термодатчик типа ТДЛ – 2 [4]. Принцип действия этого датчика основан на свойстве сплава Вуда, который плавится при температуре 700С. Преимуществами этого датчика являются небольшие габариты, визуализация сработанного прибора, простота конструкции и большая надежность.
Аппаратура ВАВ.1М предназначена для автоматического дистанционного и местного управления главными высоковольтными, низковольтными водоотливными установками, а также автоматического и местного управления одиночными водоотливными установками шахт, опасных по газу и пыли [5, 6]. Аппаратура взрывобезопасна.
4.1 Модернизация аппаратуры автоматизации
Выбранная базовая аппаратура ВАВ.1М выполняет все основные требования к автоматизации водоотливной установки. Однако в ее функциональные возможности не входит защита насосной установки от кавитации. Поэтому одним из направлений совершенствования системы автоматизации водоотливной установки является оснащение ее дополнительным устройством, которое выполняет данную функцию.
Рисунок 2 – Возникновение кавитации в трубопроводе
(анимация: 17 кадров, бесконечный цикл повторения, 106 килобайт)
Данная проблема может быть решена в случае применения принципиально новых технических средств и решений в схеме аппаратуры автоматизации - дискретная интегральная схемотехника.
К функциям, которые будут реализованы разрабатываемым устройством, можно отнести:
- управляющие (прикрытие задвижки);
- информационные (о возможности возникновения кавитации и «совет диспетчеру» об отключении насоса).
На основании проведенных исследований, сформулированных задач управления, а также с учетом технических требований и принципов построения устройства автоматизации, представим структурную схему системы защиты насосной установки от кавитации БЗК, где утолщенными линиями указано устройство БЗК и его взаимосвязь с остальными блоками (рисунок 3).
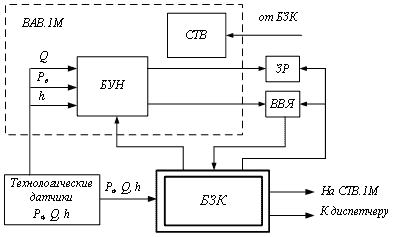
Рисунок 3 – Структурная схема защиты насосной установки от кавитации БЗК
Таким образом, устройству БЗК в аппаратуре ВАВ.1М будет отведена функция выработки управляющих воздействий в зависимости от возникновения аварийных ситуаций в подводящем трубопроводе.
Выводы
Кавитация – это главный враг для насоса, борьба с которым ведется долгие годы. Ущерб причиненный этим явлением сказывается на работоспособности насосного агрегата, дополнительными затратами на обслуживание и простоем технологического процесса.
В данный момент, применяемая аппаратура для автоматизации водоотлива не имеет абсолютной защиты от кавитации, но постоянно проводятся исследования и предлагаются новые технические решения.
Таким образом, при последующей работой над данной темой будет спроектировано устройство, которое позволит получать информацию о возможности возникновения кавитации, прогнозировать аварийные ситуации и экономить потребляемую электроэнергию путем уменьшения количества пусков.
Во время написания данного реферата магистерская работа еще не завершена. Окончательное завершение: июнь 2018 года. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты.
Список источников
- Попов В.М. Шахтные насосы (теория, расчет и эксплуатация): Справочное пособие – М.: Недра, 1993.– 224 с.
- Тимошенко Г.М. Научные основы проектирования и эксплуатации насосных установок в переходных режимах. Киев; Донецк: Вища шк. Головное изд–во, 1986. – 127 с.
- Попов В.М. Водоотливные установки: Справочное пособие. – М: Недра, 1990.–294 с.
- Груба В.И. Технические средства автоматизации в горной промышленности: Учебное пособие/ В.И. Груба, Э.К. Никулин, А.С. Оголобченко. Под общей редакцией докт. техн. наук, проф. В.И. Грубы. – Киев: ИСМО, 1998. – 373 с.
- Толпежников Л.И. Автоматическое управление процессами шахт и рудников, – М.: Недра, 1985. – 352 с.
- Карелин В.Я. Насосы и насосные станции – М.: Недра, 1979. – 376 с.
- Гейер В.Г., Тимошенко Г.М. Шахтные вентиляторные и водоотливные установки – М.: Недра , 1987.–229 с.