
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Актуальность темы
- 2. Цель и задачи исследования, планируемые результаты
- 3. Обзор исследований и разработок
- 3.1 Обзор международных источников
- 3.2 Обзор национальных источников
- 3.3 Обзор локальных источников
- 4. Анализ объекта управления
- 5. Разработка структурной схемы системы управления
- 6. Моделирование системы управления и анализ показателей качества регулирования
- Выводы
- Список источников
Введение
Современное состояние теории и практики автоматического регулирования характеризуется интенсивной разработкой и все более широким применением новых и новейших методов управления. К таким методам смело можно отнести робастное управление, управление с предиктором Смита (Internal Model Control), управление с регуляторами на основе нечеткой логики, управление с использованием нейросетей а также управление на основе прогноза состояния объекта. Наибольший интерес в последнее время проявляется к так называемому управлению объектами на основе использования прогнозирующих моделей, который сочетает в себе преимущества использования предиктора Смита и преимущества оптимального управления при наличии ограничений на управление и на переменные пространства и состояния объекта. При этом в методе не делается различие между линейными и нелинейными объектами управления; к линеаризации характеристик объекта прибегают лишь для упрощения решения задачи оптимального управления в соответствии с выбранным функционалом качества системы.
1. Актуальность темы
Использование в промышленности современных систем автоматического регулирования требует все более квалифицированных специалистов. Одним из способов повышения квалификации является использование лабораторных стендов и моделей автоматизации. Это помогает систематизировать полученные теоретические знания, технически реализовать различные законы управления и методы идентификации объектов. Предметом данной работы бакалавра являются некоторые результаты исследования, состоящего в том, чтобы опробовать метод управления с предсказанием на лабораторном макете аэродинамического объекта. Объект управления представляет собой аэродинамический объект, на основе которого разработана система автоматического управления. Он состоит из основания, к которому прикреплена трубка. В нее вставлен штифт, который может свободно вращаться по углу α. Сверху к штифту установлено крепление, обеспечивающее возможность вращения по углу β.
2. Цель и задачи исследования, планируемые результаты
Целью работы является применение метода управления, основанного на прогнозировании состояния объекта с помощью модели объекта, называемого в литературе Model Predictive Control (MPC). Это важная задача, так как на данный момент сфера практического применения MPC методов значительно увеличивается за счет относительно простой базовой схемы обратной связи, сочетающаяся с высокими адаптивными свойствами системы.
Основные задачи исследования:
- Проанализировать объект управления и сделать математическую модель объекта
- Выбор комплекса технических средств автоматизации, таких как: датчики угла поворота, двигателей постоянного тока и микроконтроллера.
- Разработка структурной схемы управления и синтез алгоритмов управления.
- Проверить работоспособность САУ методом моделирования системы управления и провести анализ показателей качества регулирования.
3. Обзор исследований и разработок
Существует множество различных современных систем регулирования, такие как система регулирования с предиктором Смита, нейросети, система регулирования на основе нечеткой логики и система управления на основе прогноза. У всех систем управления существуют достоинства и недостатки, но для данного объекта управления наиболее подходящим является выбор системы управления на основе прогноза состояния объекта.
3.1 Обзор международных источников
В зарубежном пространстве существует наибольшее количество источников по теме прогнозного управления. Основная часть книг и публикаций публикуется на немецком языке.
Книга в которой представлено введение в предикатное управление Название: Matlab 5 für Ingenieure . Systematische und praktische Einführung (Sonstige Bücher AW) Авторы: A Biran, M Breiner Издатель: Addison-Wesley; Auflage: 3. überar. u. erw. Aufl. (15. Januar 1999) ISBN: 978-3827314161 Количество страниц: 378
Данная книга полностью посвящена Model Predictive Control. Второе издание этой книги наиболее обеспечивает полное ознакомление с теоретическими и практическими аспектами.
Название: Model Predictive Control Авторы: Camacho, Eduardo F., Bordons Alba, Carlos Издатель: Springer, 2007 ISBN: 978-0-85729-398-5 Количество страниц: 296
3.2 Обзор национальных источников
В русскоязычном пространстве так же встречаются статьи по тематике прогнозного управления , но из-за того, что такой метод управления не слишком распространён, довольно сложно найти научные публикации с полезной информацией.
Красовский А.А. Системы автоматического управления полетом и их аналитическое конструирование / Красовский А.А. – М.: «Наука», 1973г. Книга содержит систематическое изложение назначения, принципов построения и функционирования ряда типовых систем управления самолетов и вертолетов и анализ процессов в контурах управления этими летательными аппаратами.
Ананьев И.В. Динамика конструирования летательных аппаратов / Ананьев И.В. – М., 1972г. – 415с. В книге изложены методы расчета колебаний упругих систем, применяемых в авиационной и машиностроительной промышленности.
3.3 Обзор локальных источников
В рамках Донецкого Национального Технического Университета (ДонНТУ) было найдено несколько работ с схожей тематикой.
Работа магистра ДонНТУ Косьяненко Лилии Федоровны - Исследование и разработка алгоритмов работы автоматизированных систем контроля состояния технологических объектов с нелинейной динамикой [3]. В рамках данной работы рассматривается улучшение динамических характеристик системы управления в переходных режимах работы.
Работа магистра ДонНТУ Безрука Александра Анатольевича - Исследование и разработка системы стабилизации полета 3-коптера по пересеченной местности [х]. В работе рассмотрены существующие методы реализации беспилотных летательных аппаратов.
Работа магистра ДонНТУ Перебейноса Валерия Валериевича - Разработка и исследование электронной системы стабилизации полёта квадрокоптера [x]. В работе рассмотрена разработка и исследование электронной системы стабилизации полёта квадрокоптера.
4. Анализ объекта управления
Объект управления представляет собой упрощенную модель аэродинамического объекта (вертолета). Учитывая общие представления про полет вертолета создана модель, которая за счет силы притяжения главного и хвостовых пропеллеров позволяет изменять наклон вертолета относительно горизонта (при полете вперед или при торможении), а также изменять направление полета.
Автоматизированная система аэродинамического управления с двумя степенями свободы должна иметь исполнительный механизм, который перемещает объект управления воздушным потоком по каждой из осей. ОУ должен иметь устойчивую платформу в основании и иметь возможность поворачиваться по осям X, Y, Z. При повороте в одной из плоскостей, должен сохраняться угол наклона в другой плоскости. Для контроля над объектом управления необходимы датчики угла поворота в каждой плоскости, которые позволяют передавать информацию об объекте в микроконтроллер для контроля и дальнейшего управления САУ. На рисунке 1 изображена система аэродинамического управления, которая позволит смоделировать полноценную модель с двумя степенями свободы.
Аэродинамическая модель состоит из платформы (1), на которой крепится пустотелая труба (2). В нее вставляется штифт (3), на котором установлено крепление для обеспечения поворота по вертикали штифта (4). Штифт (3) свободно поворачивается по горизонтали и не меняет угол наклона относительно платформы.
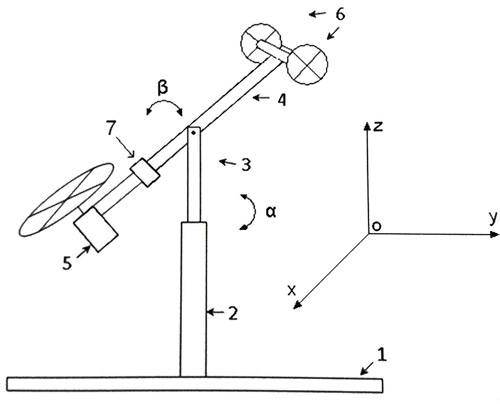
Рисунок 1 – Аэродинамическая модель с двумя степенями свободы
По краям штифта (4) крепятся коллекторные двигатели постоянного тока, на валу которых установлены пластмассовые контейнеры, которые создают воздушный поток и таким образом перемещают штифт (4) в пространстве. Двигатель (5) крепиться так, чтобы обеспечить перемещение по вертикали (вверх и вниз). На противоположной стороне расположены двигатели (6) с осями поворота во внешнюю сторону, которые обеспечивают перемещение по горизонтали (влево и вправо). По краям штифта (3) расположены датчики угла поворота, которые будут передавать информацию про состояние ОУ в МК для дальнейшего использования.
Система сбалансирована таким образом, что двигатель (5) на штифте (4) был опущен вниз при выключенном состоянии относительно двигателей (6), а при включенном состоянии поднимался до уровня горизонта. Для этого на штифте (4) закреплен специальный груз (7).
Таким образом измеряемыми величинами являются угол поворота α и угол поворота β. Для определения угла наклона α используется датчик, расположенный на штифте (3) сверху. Учитывая физические свойства ОУ, угол наклона находится в диапазоне от 0 до 85 градусов. Датчик поворота расположенный внизу штифта (3), определяет угол поворота β в диапазоне от 0 до 200 градусов.
5. Разработка структурной схемы системы управления
В этой работе рассматривается аэродинамический объект, который состоит из балки, которая свободно поворачивается как в вертикальной, так и в горизонтальной плоскости с помощью двигателей. Угол поворота в горизонтальной и вертикальной плоскости можно изменять с помощью управления напряжением, которое подается на двигатели, которое в свою очередь изменяет частоту вращения лопастей в вертикальной и горизонтальной плоскости.
Положение балки описывается четырьмя переменными процесса: горизонтальным α вертикальным β углом поворота балки, которые измеряются датчиками поворота, которые расположены в точке опоры и двумя дополнительными переменными состояния – угловые скорости изменения горизонтального и вертикального углов, которые вычисляются програмно.
Cистема уравнений будет иметь следующий вид:
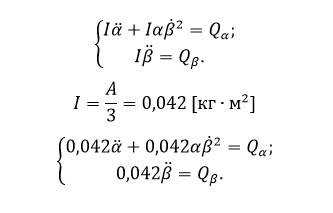
Таким образом, получена математическая модель объекта управления, которое представляет собой систему уравнений.
САУ, которая разрабатывается в данной работе, можно представить в виде структурной схемы, которая приведена на рисунке 2. Данная структурная схема является классической моделью управления в производстве.
В составе системы есть 3 двигателя, которые имеют нелинейные статические характеристики. Приведенная система имеет 2 входа – задающие углы поворота и 2 выхода – углы поворота балки в горизонтальной и вертикальной плоскости. В системе присутствует связь между переменными состояния α и β (рисунок 3), поэтому объект является многомерным.
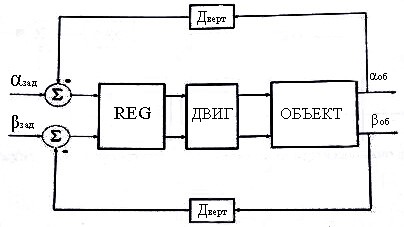
Рисунок 2 – Структурная схема управления объектом
Однако, многомерный объект можно рассматривать при первом приближении как две системы: во-первых, зависимость момента инерции балки от ее наклона для размеров модели незначительна, во-вторых взаимное влияние пропеллеров также является незначительным. Таким образом, объект на рисунке 2 можно рассматривать как 2 независимых объекта, то есть объект для горизонтальной составляющей движения (рисунок 3), и объект для вертикальной составляющей движения (рисунок 4).
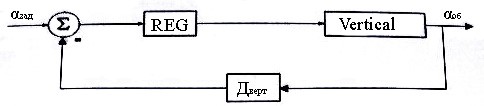
Рисунок 3 – Структурная схема управления горизонтальной составляющей объекта
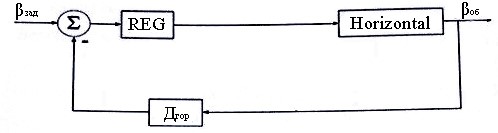
Рисунок 4 – Структурная схема управления вертикальной составляющей объекта
6. Моделирование системы управления и анализ показателей качества регулирования
Схему моделирования в пакете Simulink построим на основании структурной схемы регулирования аэродинамическим объектом. Модель приведена на рисунке 5.
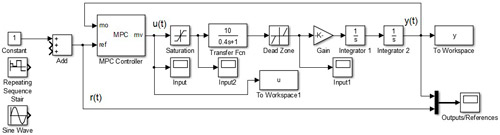
Рисунок 5 – Схема моделирования в пакете Simulink
Выполним моделирование системы при различных входных воздействиях:
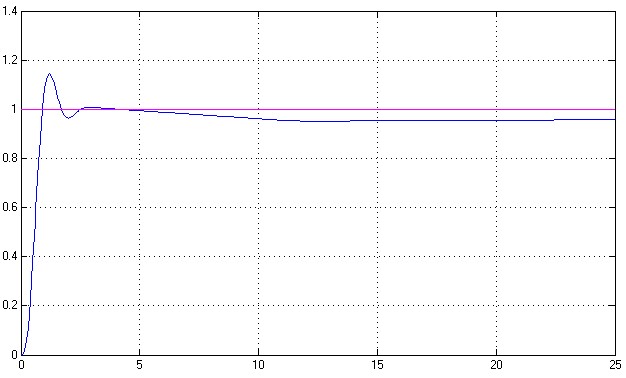
Рисунок 6 – Реакция системы при задающем воздействии - константа
Из графика видно, что переходная характеристика обладает перерегулированием, но оно находится в пределах нормы. Время переходного процесса составляет 2 секунды.
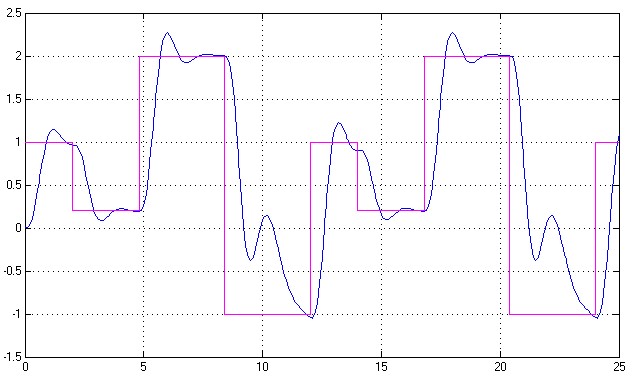
Рисунок 7 – Реакция системы на входное знакопеременное кусочно-постоянное воздействие
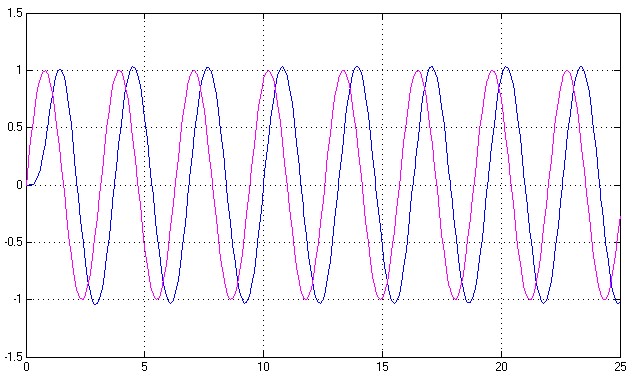
Рисунок 8 – Реакция системы на синусоидальное входное воздействие
Для того, чтобы учесть небольшие помехи датчика, добавим в схему моделирования белый шум. Этот блок должен быть расположен в цепи обратной связи. Смоделируем ситуацию, когда во время работы объекта на него будет воздействовать помеха в виде толчка, длительностью 0,4 секунды и посмотрим, как система отреагирует на такое воздействие.
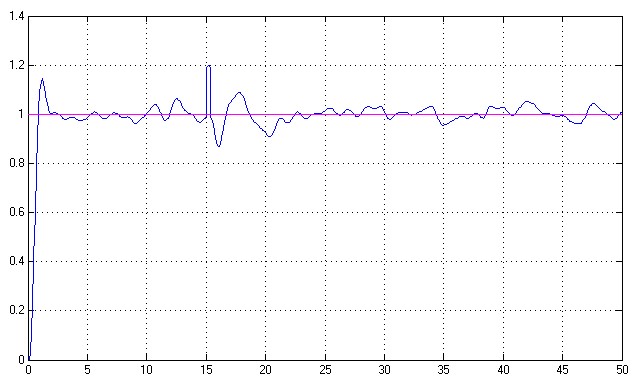
Рисунок 9 – Реакция системы на внешнюю помеху при единичном воздействии
На графике видно, что через 15 сек после начала работы системы на нее действует импульсное возмущающее воздействие, которое система оперативно отрабатывает и быстро приходит в установившееся состояние. Также на графике можно наблюдать как на нем отражается шум от потенциометров – датчиков поворота и несмотря на это система все равно находится в установившемся состоянии.
Попытка использования ПИД – регулятора, параметры которого настраиваются в системе Matlab / Simulink по линеаризованной модели, к управлению реальным объектом, содержащим нелинейные элементы (зона нечувствительности и ограничения) приводит к неутешительным результатам. Использование ПИД – регулятора для управления аэродинамическим объектом является непригодным.
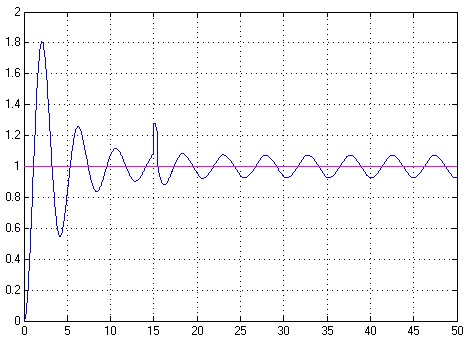
Рисунок 10 – Переходный процесс в САУ с ПИД регулятором
Выводы
В данном проекте решена задача автоматизации управления аэродинамическим объектом. Приведены все основные характеристики и конструкция модели вертолета. Проведен обзор существующих систем автоматического регулирования для выбранной модели аэродинамического объекта. Разработана функциональная схема с учетом состава и структуры функциональных узлов системы управления, выделенных на этапе постановки задания на проектирование. Получено математическое описание САУ аэродинамическим объектом. Построена и описана функциональная схема. Выбраны коэффициенты для MPC регулятора. Выполнено моделирование САУ в пакете Matlab&Simulink. Результаты моделирования доказывают работоспособность САУ и возможность применения разработанной системы для аэродинамических объектов.
Список источников
- Хорхордин А.В., Олейников Е.А., Система автоматического управления аэродинамическим объектом на основе ПИД-регулятора. Збірка наукових праць SWorld за матеріалами міжнародної науково-практичної конференції «Наукові дослідження і їхнє практичне застосування. Сучасний стан і шляхи розвитку - 2011 » 4-15 жовтня 2011. Том 4 «Технічні науки», стр. 66 – 69. Одеса: Черноморье, 2011.
- Biran, A. MATLAB 5 für Ingenieure: Systematische und praktische Einführung / Adrian Biran: Moche Breiner [Übersetzung aus dem Amerikan. Stefan Braun; Harald Häuser]. – 3.Auflage – Bonn [u.a.] : Addison-Wesley-Longman,1999.- 542 p.
- .Гессоу А. и Мейерс Г. Аэродинамика вертолета / Гессоу А. и Мейерс Г. – М.: Оборонгиз, 1954, - 256с.
- Красовский А.А. Системы автоматического управления полетом и их аналитическое конструирование / Красовский А.А. – М.: «Наука», 1973г.
- Ананьев И.В. Динамика конструирования летательных аппаратов / Ананьев И.В. – М., 1972г. – 415с.
- Рафиков Г.Ш. Современная теория управления дискретных динамических систем / Рафиков Г.Ш. – Донецк: «Норд-пресс», 2005г., -345с.
- Дейч А.М. Методы идентификации динамических объектов / Дейч А.М. – М.: Энергия, 1979. – 240с.
- Гроп Д. Методы идентификации систем / Гроп Д. – М.: Мир, 1979. – 302с.
- Баранов В.Н. Применение микроконтроллеров AVR: схемы, алгоритмы программы / Баранов В.Н. – М.: «Додека - XXI», 2004. – 288с.
- Трамперт В. Измерение, управление и регулирование с помощью AVR микроконтроллеров / Трамперт В. – К: «МК - пресс», 2007г. – 208с.
- М.И. Макаров, А.В. Жадан, А.А. Зори Надежность электронных устройств автоматики, информационных и компьютерных систем / М.И. Макаров, А.В. Жадан, А.А. Зори – Донецк, ДонГТУ 1996.
- Н.Н. Акимов, Е.П. Ващуков Резисторы, конденсаторы, трансформаторы, дроссели, коммутационные устройства РЭА: Справочник / Н.Н. Акимов, Е.П. Ващуков Минск 1994г.
- Р.М. Терещук, К.М. Терищук, С.А. Седов Полупроводниковые приемно - усилительные устройства. Справочник радиолюбителя / Р.М. Терещук, К.М. Терищук, С.А. Седов – Киев.: Научный совет. 1982г.
- . Теория надежности и радиоэлектронных систем в примерах и задачах / Под ред. Р.В. Дружинина. – М.: Энергия, 1976. – 448с.
- Косьяненко Лилии Федоровны - Исследование и разработка алгоритмов работы автоматизированных систем контроля состояния технологических объектов с нелинейной динамикой [3].
- Безрука Александра Анатольевича - Исследование и разработка системы стабилизации полета 3-коптера по пересеченной местности [х].
- Перебейноса Валерия Валериевича - Разработка и исследование электронной системы стабилизации полёта квадрокоптера [x].