
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Актуальність теми
- 2. Мета і задачі дослідження та заплановані результати
- 3. Огляд досліджень та розробок
- 3.1 Огляд міжнародних джерел
- 3.2 Огляд національних джерел
- 3.3 Огляд локальних джерел
- 4. Аналіз об'єкта управління
- 5. Розробка структурної схеми системи управління
- 6. Моделювання системи управління і аналіз показників якості регулювання
- Висновки
- Перелік посилань
Вступ
Сучасний стан теорії і практики автоматичного регулювання характеризується інтенсивною розробкою і все більш широким застосуванням нових і новітніх методів управління. До таких методів сміливо можна віднести Робастное управління, управління з предиктором Сміта (Internal Model Control), управління з регуляторами на основі нечіткої логіки, управління з використанням нейромереж а також управління на основі прогнозу стану об'єкта. Найбільший інтерес останнім часом проявляється до так званого управління об'єктами на основі використання прогнозуючих моделей, який поєднує в собі переваги використання предіктора Сміта і переваги оптимального управління при наявності обмежень на керування та на змінні простору і стану об'єкта. При цьому в методі не робиться розходження між лінійними і нелінійними об'єктами управління; до лінеаризації характеристик об'єкта вдаються лише для спрощення рішення задачі оптимального управління відповідно до обраного функціоналом якості системи.
1. Актуальність теми
Використання в промисловості сучасних систем автоматичного регулювання вимагає все більш кваліфікованих фахівців. Одним із способів підвищення кваліфікації є використання лабораторних стендів і моделей автоматизації. Це допомагає систематизувати отримані теоретичні знання, технічно реалізувати різні закони управління і методи ідентифікації об'єктів. Предметом даної роботи бакалавра є деякі результати дослідження, що складається в тому, щоб випробувати метод управління з прогнозом на лабораторному макеті аеродинамічного об'єкту. Об'єкт управління являє собою аеродинамічний об'єкт, на основі якого розроблено систему автоматичного управління. Він складається з підстави, до якого прикріплена трубка. У неї вставлений штифт, який може вільно обертатися по куту α. Зверху до штифту встановлено кріплення, що забезпечує можливість обертання по куту β.
2. Мета і задачі дослідження та заплановані результати
Метою роботи є застосування методу управління, заснованого на прогнозуванні стану об'єкта за допомогою моделі об'єкта, званого в літературі Model Predictive Control (MPC). Це важливе завдання, так як на даний момент сфера практичного застосування MPC методів значно збільшується за рахунок відносно простий базової схеми зворотного зв'язку, що поєднується з високими адаптивними властивостями системи.
Основні завдання дослідження:
- Проаналізувати об'єкт управління і зробити математичну модель об'єкта
- Вибір комплексу технічних засобів автоматизації, таких як: датчики кута повороту, двигунів постійного струму і мікроконтролера.
- Розробка структурної схеми управління і синтез алгоритмів керування.
- Перевірити працездатність САУ методом моделювання системи управління і провести аналіз показників якості регулювання.
3. Огляд досліджень та розробок
Оскільки автомати Мура є важливою частиною цифрових систем, то проблеми їх синтезу, аналізу, мінімізації і реалізації були широко досліджені як американськими, європейськими, японськими вченими, так і вітчизняними спеціалістами. Питанням реалізації цифрових пристроїв за допомогою FPGA і Verilog HDL також присвячений ряд робіт, головним чином, дослідників західної школи.
3.1 Огляд міжнародних джерел
Існує безліч різних сучасних систем регулювання, такі як система регулювання з предиктором Сміта, нейромережі, система регулювання на основі нечіткої логіки і система управління на основі прогнозу. У всіх систем управління існують переваги і недоліки, але для даного об'єкта управління найбільш підходящим є вибір системи управління на основі прогнозу стану об'єкта.
3.1 Огляд міжнародних джерел
У зарубіжному просторі існує найбільша кількість джерел по темі прогнозного управління. Основна частина книг і публікацій публікується на німецькій мові.
Книга в якій представлено введення в предикатное управління Назва: Matlab 5 für Ingenieure. Systematische und praktische Einführung (Sonstige Bücher AW) Автори: A Biran, M Breiner Видавець: Addison-Wesley; Auflage: 3. überar. u. erw. Aufl. (15. Januar 1999) ISBN: 978-3827314161 Кількість сторінок: 378
Дана книга повністю присвячена Model Predictive Control. Друге видання цієї книги найбільш забезпечує повне ознайомлення з теоретичними і практичними аспектами.
Назва: Model Predictive Control Автори: Camacho, Eduardo F., Bordons Alba, Carlos идавець: Springer, 2007 ISBN: 978-0-85729-398-5 Кількість сторінок: 296
3.2 Огляд національних джерел
У російськомовному просторі так само зустрічаються статті по тематиці прогнозного управління, але через те, що такий метод управління не надто поширений, досить складно знайти наукові публікації з корисною інформацією.
Красовський О.О. Системи автоматичного управління польотом і їх аналітичне конструювання / Красовський О.О. - М .: «Наука», 1973р. Книга містить систематичний виклад призначення, принципів побудови і функціонування ряду типових систем управління літаків і вертольотів і аналіз процесів в контурах управління цими літальними апаратами.
Ананьїв І.В. Динаміка конструювання літальних апаратів / Ананьїв І.В. - М., 1972 р. - 415с. У книзі викладено методи розрахунку коливань пружних систем, що застосовуються в авіаційній і машинобудівній промисловості.
3.3 Огляд локальних джерел
В рамках Донецького Національного Технічного Університету (ДонНТУ) було знайдено кілька робіт з схожою тематикою.
Робота магістра ДонНТУ Косьяненко Лілії Федорівни - Дослідження і розробка алгоритмів роботи автоматизованих систем контролю стану технологічних об'єктів з нелінійної динамікою [3]. В рамках даної роботи розглядається поліпшення динамічних характеристик системи управління в перехідних режимах роботи.
Робота магістра ДонНТУ Безрука Олександра Анатолійовича - Дослідження і розробка системи стабілізації польоту 3-коптера по пересіченій місцевості [х]. В роботі розглянуті існуючі методи реалізації безпілотних літальних апаратів.
Робота магістра ДонНТУ Перебийноса Валерія Валерійовича - Розробка та дослідження електронної системи стабілізації польоту квадрокоптера [x]. В роботі розглянута розробка і дослідження електронної системи стабілізації польоту квадрокоптера.
4. Аналіз об'єкта управління
Об'єкт управління являє собою спрощену модель аеродинамічного об'єкта (вертольота). З огляду на загальні уявлення про політ вертольота створена модель, яка за рахунок сили тяжіння головного і хвостових пропелерів дозволяє змінювати нахил вертольота відносно горизонту (при польоті вперед або при гальмуванні), а також змінювати напрямок польоту.
Автоматизована система аеродинамічного управління з двома ступенями свободи повинна мати виконавчий механізм, який переміщує об'єкт управління повітряним потоком по кожній з осей. ОУ повинен мати стійку платформу в підставі і мати можливість повертатися по осях X, Y, Z. При повороті в одній з площин, повинен зберігатися кут нахилу в іншій площині. Для контролю над об'єктом управління необхідні датчики кута повороту в кожній площині, які дозволяють передавати інформацію про об'єкт в мікроконтролер для контролю і подальшого управління САУ. На рисунку 1 зображена система аеродинамічного управління, яка дозволить змоделювати повноцінну модель з двома ступенями свободи.
Аеродинамічна модель складається з платформи (1), на якій кріпиться порожниста труба (2). У неї вставляється штифт (3), на якому встановлено кріплення для забезпечення повороту по вертикалі штифта (4). Штифт (3) вільно повертається по горизонталі і не змінює кут нахилу щодо платформи.
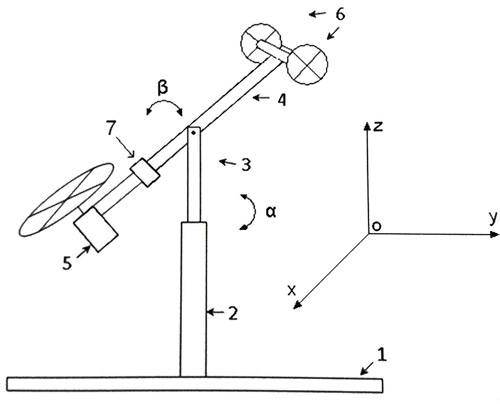
Рисунок 1 – Аеродинамічна модель з двома ступенями свободи
По краях штифта (4) кріпляться колекторні двигуни постійного струму, на валу яких встановлені пластмасові контейнери, які створюють повітряний потік і таким чином переміщують штифт (4) в просторі. Двигун (5) кріпитися так, щоб забезпечити переміщення по вертикалі (вгору і вниз). На протилежному боці розташовані двигуни (6) з осями повороту в зовнішню сторону, які забезпечують переміщення по горизонталі (вліво і вправо). По краях штифта (3) розташовані датчики кута повороту, які будуть передавати інформацію про стан ОУ в МК для подальшого використання.
Система збалансована таким чином, що двигун (5) на штифті (4) був опущений вниз при вимкненому стані щодо двигунів (6), а при включеному стані піднімався до рівня горизонту. Для цього на штифті (4) закріплений спеціальний вантаж (7).
Таким чином вимірюваними величинами є кут повороту α і кут повороту β. Для визначення кута нахилу α використовується датчик, розташований на штифті (3) зверху. З огляду на фізичні властивості ОУ, кут нахилу знаходиться в діапазоні від 0 до 85 градусів. Датчик повороту розташований внизу штифта (3), визначає кут повороту β в діапазоні від 0 до 200 градусів.
5. Розробка структурної схеми системи управління/h2>
У даній роботі розглядається аеродинамічний об'єкт, який складається з балки, яка вільно повертається як у вертикальній, так і в горизонтальній площині за допомогою двигунів. Кут повороту в горизонтальній і вертикальній площині можна змінювати за допомогою управління напругою, що подається на двигуни, яке в свою чергу змінює частоту обертання лопатей в вертикальній і горизонтальній площині.
Положення балки описується чотирма змінними процесу: горизонтальним α вертикальним β кутом повороту балки, які вимірюються датчиками повороту, які розташовані в точці опори і двома додатковими змінними стану - кутові швидкості зміни горизонтального і вертикального кутів, які обчислюються програмно.
Cистема рівнянь матиме наступний вигляд:
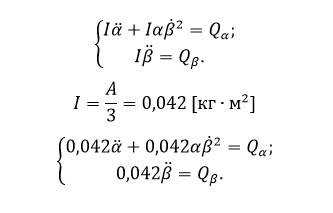
Таким чином, отримана математична модель об'єкта управління, яке представляє собою систему рівнянь.
САУ, яка розробляється в даній роботі, можна представити у вигляді структурної схеми, яка наведена на рисунку 2. Дана структурна схема є класичною моделлю управління у виробництві.
У складі системи є 3 двигуна, які мають нелінійні статичні характеристики. Наведена система має 2 входи - задають кути повороту і 2 виходи - кути повороту балки в горизонтальній і вертикальній площині. В системі присутній зв'язок між змінними стану α і β (рисунок 3), тому об'єкт є багатовимірним.
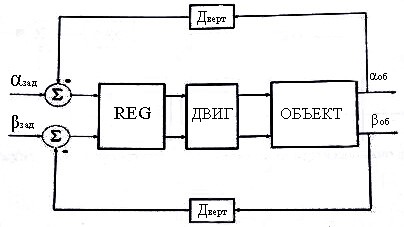
Рисунок 2 – Структурна схема управління об'єктом
Однак, багатовимірний об'єкт можна розглядати при першому наближенні як дві системи: по-перше, залежність моменту інерції балки від її нахилу для розмірів моделі незначна, по-друге взаємний вплив пропелерів також є незначним. Таким чином, об'єкт на малюнку 2 можна розглядати як 2 незалежних об'єкта, тобто об'єкт для горизонтальної складової руху (рисунок 3), і об'єкт для вертикальної складової руху (рисунок 4).
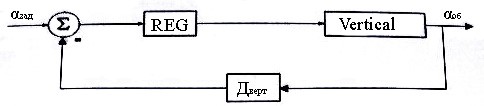
Рисунок 3 – Структурна схема управління горизонтальної складової об'єкта
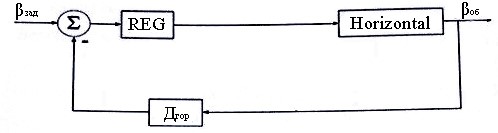
Рисунок 4 – Структурна схема управління вертикальної складової об'єкта
6. Моделювання системи управління і аналіз показників якості регулювання
Схему моделювання в пакеті Simulink побудуємо на підставі структурної схеми регулювання аеродинамічним об'єктом. Модель приведена на рисунку 5.
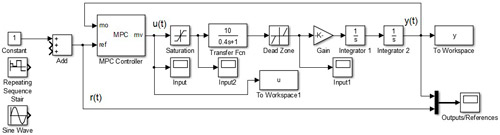
Рисунок 5 – Схема моделювання в пакеті Simulink
Виконаємо моделювання системи при різних вхідних впливах:
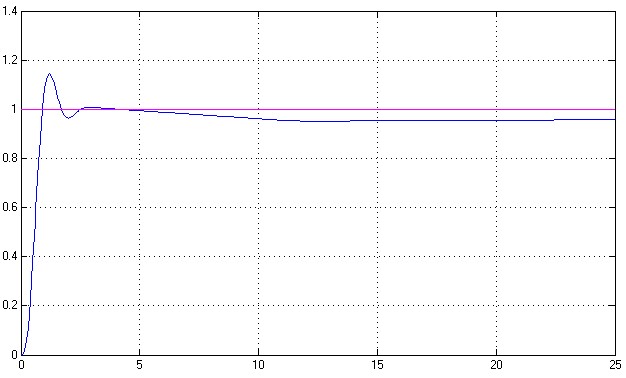
Рисунок 6 – Реакція системи при заданому впливі - константа
З графіка видно, що перехідна характеристика має перерегулюванням, але воно знаходиться в межах норми. Час перехідного процесу складає 2 секунди.
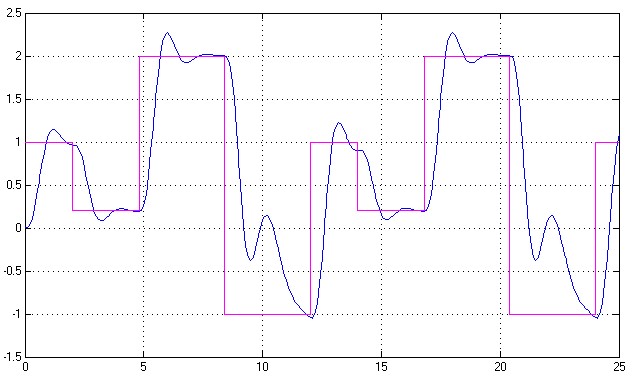
Рисунок 7 – Реакція системи на вхідний знакозмінні кусочно-постійна дія
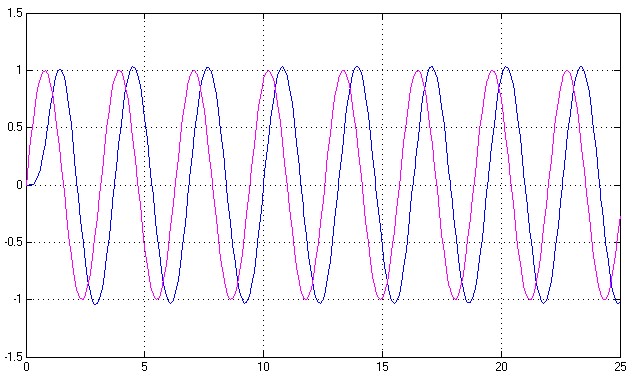
Рисунок 8 – Реакція системи на синусоидальное вхідний вплив
Для того, щоб врахувати невеликі перешкоди датчика, додамо в схему моделювання білий шум. Цей блок повинен бути розташований в колі зворотного зв'язку. Змоделюємо ситуацію, коли під час роботи об'єкта на нього буде впливати перешкода у вигляді поштовху, тривалістю 0,4 секунди і подивимося, як система відреагує на такий вплив.
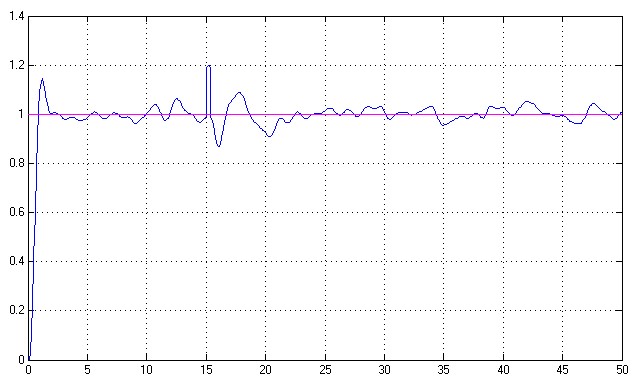
Рисунок 9 – Реакція системи на зовнішню перешкоду при одиничному впливі
На графіку видно, що через 15 сек після початку роботи системи на неї діє імпульсна рівноваги вплив, яке система оперативно відпрацьовує і швидко приходить в сталий стан. Також на графіку можна спостерігати як на ньому відбивається шум від потенціометрів - датчиків повороту і не дивлячись на це система все одно знаходиться в сталому стані.
Ви намагаєтесь отримати доступ ПІД - регулятора, параметри якого настроюються в системі Matlab / Simulink по линеаризованной моделі, до управління реальним об'єктом, що містить нелінійні елементи (зона нечутливості і обмеження) призводить до невтішних результатів. Використання ПІД - регулятора для управління аеродинамічними об'єктом є непридатним.
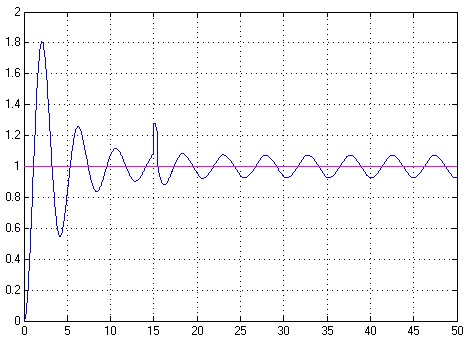
Рисунок 10 – Перехідний процес в САУ з ПІД регулятором
Висновки
В даному проекті вирішена задача автоматизації управління аеродинамічним об'єктом. Наведено всі основні характеристики і конструкція моделі вертольота. Проведено огляд існуючих систем автоматичного регулювання для обраної моделі аеродинамічного об'єкту. Розроблено функціональну схему з урахуванням складу і структури функціональних вузлів системи управління, виділених на етапі постановки завдання на проектування. Отримано математичний опис САУ аеродинамічним об'єктом. Побудована і описана функціональна схема. Обрані коефіцієнти для MPC регулятора. Виконано моделювання САУ в пакеті Matlab & Simulink. Результати моделювання доводять працездатність САУ і можливість застосування розробленої системи для аеродинамічних об'єктів.
Перелік посилань
- Хорхордин А.В., Олейников Е.А., Система автоматического управления аэродинамическим объектом на основе ПИД-регулятора. Збірка наукових праць SWorld за матеріалами міжнародної науково-практичної конференції «Наукові дослідження і їхнє практичне застосування. Сучасний стан і шляхи розвитку - 2011 » 4-15 жовтня 2011. Том 4 «Технічні науки», стр. 66 – 69. Одеса: Черноморье, 2011.
- Biran, A. MATLAB 5 für Ingenieure: Systematische und praktische Einführung / Adrian Biran: Moche Breiner [Übersetzung aus dem Amerikan. Stefan Braun; Harald Häuser]. – 3.Auflage – Bonn [u.a.] : Addison-Wesley-Longman,1999.- 542 p.
- .Гессоу А. и Мейерс Г. Аэродинамика вертолета / Гессоу А. и Мейерс Г. – М.: Оборонгиз, 1954, - 256с.
- Красовский А.А. Системы автоматического управления полетом и их аналитическое конструирование / Красовский А.А. – М.: «Наука», 1973г.
- Ананьев И.В. Динамика конструирования летательных аппаратов / Ананьев И.В. – М., 1972г. – 415с.
- Рафиков Г.Ш. Современная теория управления дискретных динамических систем / Рафиков Г.Ш. – Донецк: «Норд-пресс», 2005г., -345с.
- Дейч А.М. Методы идентификации динамических объектов / Дейч А.М. – М.: Энергия, 1979. – 240с.
- Гроп Д. Методы идентификации систем / Гроп Д. – М.: Мир, 1979. – 302с.
- Баранов В.Н. Применение микроконтроллеров AVR: схемы, алгоритмы программы / Баранов В.Н. – М.: «Додека - XXI», 2004. – 288с.
- Трамперт В. Измерение, управление и регулирование с помощью AVR микроконтроллеров / Трамперт В. – К: «МК - пресс», 2007г. – 208с.
- М.И. Макаров, А.В. Жадан, А.А. Зори Надежность электронных устройств автоматики, информационных и компьютерных систем / М.И. Макаров, А.В. Жадан, А.А. Зори – Донецк, ДонГТУ 1996.
- Н.Н. Акимов, Е.П. Ващуков Резисторы, конденсаторы, трансформаторы, дроссели, коммутационные устройства РЭА: Справочник / Н.Н. Акимов, Е.П. Ващуков Минск 1994г.
- Р.М. Терещук, К.М. Терищук, С.А. Седов Полупроводниковые приемно - усилительные устройства. Справочник радиолюбителя / Р.М. Терещук, К.М. Терищук, С.А. Седов – Киев.: Научный совет. 1982г.
- . Теория надежности и радиоэлектронных систем в примерах и задачах / Под ред. Р.В. Дружинина. – М.: Энергия, 1976. – 448с.
- Косьяненко Лилии Федоровны - Исследование и разработка алгоритмов работы автоматизированных систем контроля состояния технологических объектов с нелинейной динамикой [3].
- Безрука Александра Анатольевича - Исследование и разработка системы стабилизации полета 3-коптера по пересеченной местности [х].
- Перебейноса Валерия Валериевича - Разработка и исследование электронной системы стабилизации полёта квадрокоптера [x].