
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Актуальність теми
- 2. Мета і завдання дослідження
- 3. Математичне моделювання імпульсного перетворювача підвищує типу
- 4. Вимоги, що пред'являються для системи управління підвищує імпульсним перетворювачем
- 5. Опис апаратного модуля ШИМ мікроконтролера STM32F4
- 6. Плановані дослідження
- Список літератури
Вступ
В роботі обґрунтовується можливість застосування широтно – імпульсної модуляції для управління підвищує імпульсним перетворювачем при різних навантаженнях. Даний тип перетворювачів характеризується нелінійної регулювальної характеристикою, що ускладнює використання ШІМ для нього.
1. Актуальність теми
Підвищуючий імпульсний перетворювач (ІП) використовується в сонячних електростанціях і електромобілях. Цей факт грунтується на тому, що струм, споживаний від джерела постійного струму (акумуляторна або сонячна батарея), є безперервним. У порівнянні з імпульсним струмом джерела втрати менше, крім того вольтамперная характеристика сонячної панелі по суті не дає можливості створення режиму споживання максимальної потужності. Також таке джерело характеризується зниженим значенням напруги, яке змінюється в процесі роботи.
Тому завдання проектування системи управління для даних застосувань на базі апаратного модуля ШИМ сучасних мікроконтролерів є актуальним завданням. У даній роботі розглядається тільки робота імпульсного перетворювача на активний опір.
2. Мета і завдання дослідження
Метою магістерської роботи є розробка системи управління підвищує імпульсним перетворювачем, що працюють на різні типи навантаження.
Основні завдання дослідження:
- Математичне моделювання імпульсного перетворювача підвищує типу.
- Огляд існуючих методів управління підвищує імпульсним перетворювачем.
- Опис апаратного модуля ШИМ мікроконтролера STM32F4.
- Розробка системи управління підвищує імпульсним.
3. Математичне моделювання імпульсного перетворювача підвищує типу
Робота схеми (рис.3.1) ґрунтується на нагромадженні енергії дроселя L при підключенні до джерела з наступною її віддачею в навантаження. Для згладжування пульсацій напруги на навантаженні Rн паралельно їй підключений конденсатор С. Схема також складається з транзистора VT і діода VD. напруга управління uУПР визначає тривалість відкритого стану ключа tВКЛ при періоді перемикання Т [ 1–2 ].
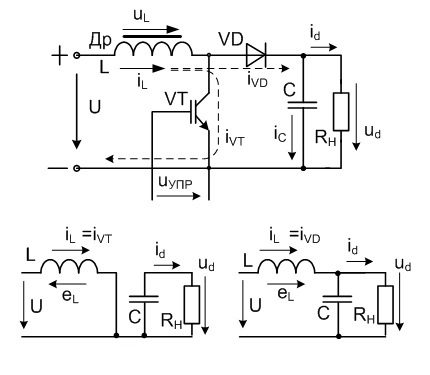
Рисунок 3.1 – Принципова схема силових ланцюгів імпульсного перетворювача підвищуючого типу
Для аналізу використовуємо схему заміщення (рис.3.2) для двох можливих станів ланцюгів ІП за період комутації (Tк) ключа VT1.

Рисунок 3.2 – Схема заміщення підвищуючого ІП а) VT – відкритий; б) VT – закритий.
На рис. 3.2 опір ланцюга RΣ характеризує загальне падіння напруги і складається з внутрішнього опору джерела, з'єднувальних проводів, активного опору дроселя і опору одного з приладів у відкритому стані. А активний опір Rн характеризує еквівалентну навантаження (АІН–АТ), з урахуванням того, що АІН споживає активну потужність від джерела живлення.
Рівняння, що описують роботу IП:

де:
- iL, iVD, iС – відповідно миттєві значення струму джерела живлення, струму через діод VD1, ємнісного струму;
- uL, ud, uАВ – відповідно миттєві значення напруг на дроселі, вихідної напруги ІП, на транзисторі VT1.
Причому деякі параметри схеми не є безперервними і змінюють свої значення в залежності від стану ключа VT1:
- VT1 – відкритий: uАВ=0; iVD=0;
- VT1 – закритий: uАВ=ud; iVD=iL.
Відповідно до цього можна визначити миттєві значення uL и iVD за період комутації Тк:
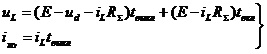
де:
- tвкл, tвикл – логічний сигнал, що приймає значення
1
на інтервалі часу відповідному включеному (виключеному) станів VT1.
Для складання усередненої моделі, можна скористатися визначенням середнього значення величини за період ШІМ:
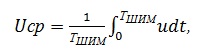
де:
- TШІМ – період ШІМ.
Перевірка адекватності моделей для миттєвих значень (Instantaneous model) і для середніх значень (average model) була використана імітаційна модель в МАТЛАБ зібрана за допомогою бібліотеки powersystem (matlab powersystem model).
Загальний вигляд моделі наведено на рисунку 3.3.

Рисунок 3.3 – Загальний вигляд МАТЛАБ – моделі перевірки адекватності
При моделюванні використовувалися наступні пераметри: E=4 В, L=1 мГн, С=1 мФ, R=5 Ом, RΣ=0.101 Ом, TШИМ=0.1 мс, γ=0.75 (шпаруватість ШІМ), період дискретності моделі 2 мкс.
На рисунку 3.4 показані діаграми роботи трьох моделей в МАТЛАБ. На них видно, що збіжність знаходиться в межах 5 %. Однак похибка обумовлена неточністю генератора ШІМ, який має період 0.1 мс, і в період ШІМ укладається тільки 50 точок. Зменшивши період дискретності до 0.2 мкс можна отримати 500 точок за період ШІМ. результати роботи моделі наводяться на рисунку 3.5.
Збільшені інтервали роботи підвищує імпульсного перетворювача в перехідному і сталому режимах роботи приведені на рисунку 3.6. Чому очевидно, що збіжність моделей в перехідних режимах відстає на один крок дискретності, а в сталому режимі похибка відсутня.
При цьому модель миттєвих величин також практично сходиться з імітаційної моделлю (powersystem model).
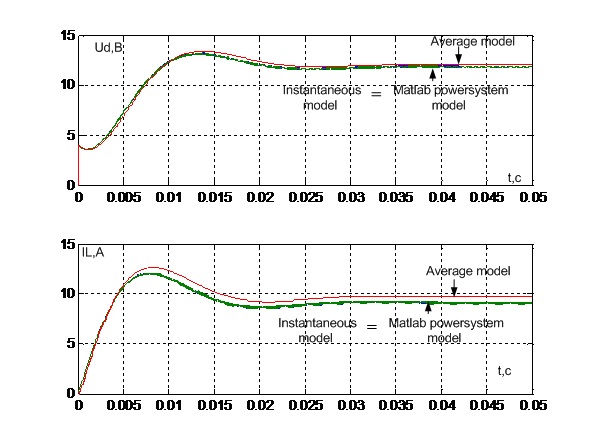
Рисунок 3.4 – Результати роботи моделей при кроці дискретності 2 мкс
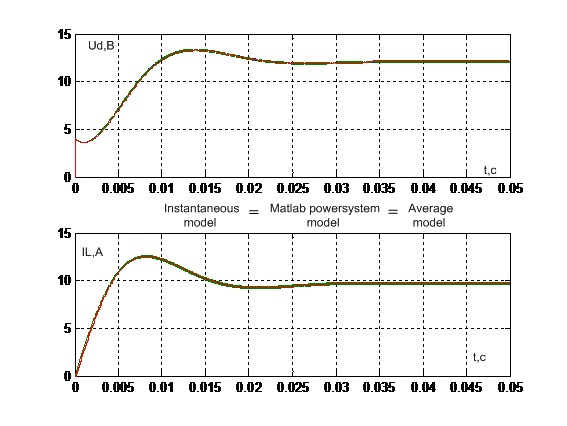
Рисунок 3.5 – Результати роботи моделей при кроці дискретності 0.2 мкс

Рисунок 3.6 – Збільшені графіки роботи моделі в перехідному і усталеному режимах роботи
4. Вимоги, що пред'являються для системи управління підвищуючим імпульсним перетворювачем
В разі живлення навантаження у вигляді двигуна відхилення напруги вниз не дозволить двигуну вийти на паспортні характеристики: потужність, магнітний потік.
Якщо ж навантаженням виступає мережа, то зниження вихідної напруги ІП (від нього залежить вихідна напруга генератора) автоматично ускладнить віддачу максимальної потужності.
З точки зору динаміки роботи важливим фактором є зміна параметрів навантаження (коливання напруги мережі, зміна режиму роботи електромобіля). Тому підтримка постійної напруги на виході імпульсного перетворювача важливо, для захисту напівпровідникових пристроїв. В цьому випадку система управління повинна швидко реагувати на будь–які зовнішні і параметричні збурення в роботі схеми.
Для описаних вище застосувань сонячної електростанції і електромобіля управління підвищує ІП має забезпечувати [3–5]:
- Достатню точність в регулюванні вихідного напруги.
- Володіти високою швидкодією в регулюванні напруги.
5. Опис апаратного модуля ШIМ мікроконтролера STM32F4
Процесори з ядрами ARM на даний момент широко застосовуються в мобільних пристроях і вбудованих системах різного застосування [6]. Архітектура має такими привабливими властивостями, як зручна і ефективна система команд, потужна підтримка при розробці програмного забезпечення, висока енергоефективність. Однією з останніх версій архітектури ARM є ARM-Cortex-хх, передбачає варіанти для процесорів загального призначення – Cortex-Aх, і для вбудованих додатків – Cortex-mХ. Функціонально архітектури практично ідентичні, за винятком того, що Cortex-A оптимізована по швидкодії з метою досягнення високої продуктивності, а Cortex-M – по енергоспоживанню, забезпечуючи баланс між енергоефективністю і продуктивністю [6].
Вимоги додатків для вбудованих систем постійно підвищуються & ndash; це і забезпечення призначеного для користувача інтерфейсу (дотики, а графічний інтерфейс), високі мультимедійні можливості (кодування / декодування аудіо / відеопотоків), обробка даних (цифрова обробка сигналів, інтелектуальний аналіз), і все це при обмежених енергетичних ресурсах. з цієї причини мікроконтролери на базі архітектури ARM-Cortex-mХ набирають популярність.
32–розрядні мікроконтролери STMicroelectronics серії STM32 F4 належать до найбільш потужної версії архітектури ARM-Cortex-M – ARM-Cortex-M4F [7–8]. Це дозволяє їм поєднувати в собі можливості:
- Мікроконтролерів загального призначення:
- багатий набір периферії;
- низьке енергоспоживання;
- продуктивність реального часу.
- Цифрового сигнального процесора:
- оптимізований набір команд, більшість з яких виконуються за один цикл;
- SIMD інструкції;
- схема паралельного зсуву регістрів.
- Обчислювального процесора:
- блок обчислень в форматі з плаваючою точкою;
- одинарна точність;
- простота програмування;
- широкий діапазон оброблюваних даних.
Для створення алгоритму управління вихідним напругою ІП передбачається використання мікроконтролера STM32F4 має 2 апаратних модуля ШИМ з поглибленими настройками (advanced PWM). Кожен модуль крім чотирьох незалежних входів має наступні характеристики:
- вибір джерела таймера для генерації сигналу ШІМ (TIM1 / TIM8);
- встановка періодa ШІМ, що є величиною постійною і не може змінюватися під час роботи;
- вибирається режим роботи лічильника несучої ШІМ прямого / зворотного рахунку або центрована ШІМ (TIM_CouterMode_Up, TIM_CounterMode_Down, TIM_CounterMode_CenterAligned1, 2, 3);
- включення / відключення конфігурацію мертвого часу;
- завдання значення мертвого часу (1–6 мкс);
- установка конфігурації блокування таймера (TIM_LOCKLevel_OFF, TIM_LOCKLevel_1, TIM_LOCKLevel_2, TIM_LOCKLevel_3);
- Опція затримки для TIM1 – затримка вхідного сигналу з каналу PB12, для TIM8 – затримка вхідного сигналу з каналу PA6 (Disable, Enable with input active high, Enable with input active low);
- автоматична активація виходу (ON / OFF);
- конфігурація виходів чотирьох каналів по застосуванню, наприклад формування комплементарних імпульсів, тільки імпульсу верхнього ключа, або тільки імпульсу нижнього ключа;
- додаткова конфігурація виходів, в тому числі інверсія або повторення, а також налаштування в режимі очікування (логічний сигнал 1 або 0).
Більшість налаштувань модуля для розробки алгоритму не використовуються. Оскільки ключ в схемі використовується один, настройки комплементарного управління і мертвого часу не використовуються.
6. Плановані дослідження
Планується розробка системи управління імпульсним перетворювачем підвищує типу, яка б дала можливість використовувати апаратний модуль ШІМ і при цьому задовольняла б вимогам до системи управління.
На момент написання даного реферату магістерська робота ще не завершена. Орієнтовна дата завершення магістерської роботи: червень 2019 року. Повний текст роботи та матеріали по темі можуть бути отримані у автора або його керівника після зазначеної дати.
Список літератури
- Steadicam. [Электронный ресурс]. – Режим доступа: https://ru.wikipedia.org/wiki/Steadicam.
- Отладочная плата STM32F4 Discovery. [Электронный ресурс]. – Режим доступа: http://robotosha.ru/stm32/stm32f407-discovery-board.html..
- L298 Dataseet – STMicroelectronics. DUAL FULL-BRIDGE DRIVER L298.
- MPU-6000 and MPU-6050 Register Map and Descriptions Revision 4.0, DataSeet №RM-MPU-6000A-00.
- MPU-6000 and MPU-6050 Register Map and Descriptions Revision 4.0, RegisterMap №RM-MPU-6000A-00.
- МЭМС-датчики движения от STMicroelectronics: акселерометры и гироскопы. [Электронный ресурс]. – Режим доступа: http://www.russianelectronics.ru/leader-r/review/2193/doc/48456/.
- STMicroelectronics. [Электронный ресурс]. – Режим доступа: https://www.st.com/content/st_com/en.html.
- Системы регулирования положения. [Электронный ресурс]. – Режим доступа: https://studfiles.net/preview/5682803/.