
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Актуальность темы
- 2. Цель и задачи исследования, планируемые результаты
- 3. Требования к системе импульсно-фазового управления
- 4. Обзор известных семейств микроконтроллеров
- 5. Реализация алгоритма управления
- 6. Модель системы ТРН-АД
- 7. Исследование влияния погрешности
- Выводы
- Список источников
Введение
Цифровые системы управления получили широкое распространение за несколько последних лет. В данных системах информация заключена не в таких параметрах сигналов, как величина напряжения или тока, а в числах, представленных обычно в двоичном коде. Для формирования, передачи и преобразования двоичных сигналов в цифровых системах управления используются отдельные элементы цифровой техники, т.е. регистры, счетчики, логические элементы, а также микропроцессорные комплекты, специализированные или универсальные цифровые вычислительные машины.
Цифровыми системами с компьютерным управлением можно управлять с помощью программного обеспечения, добавляя новые функции без замены аппаратных средств. Часто это может быть сделано без участия завода-изготовителя путём простого обновления программного продукта. Подобная функция позволяет быстро адаптироваться к изменяющимся требованиям. Кроме того, возможно применение сложных алгоритмов, которые в аналоговых системах невозможны или же осуществимы, но только с очень высокими расходами.
Хранение информации в цифровых системах проще, чем в аналоговых. Помехоустойчивость цифровых систем позволяет хранить и извлекать данные без повреждения. В аналоговой системе старение и износ может ухудшить записанную информацию. В цифровой же, до тех пор, пока общие помехи не превышают определённого уровня, информация может быть восстановлена совершенно точно.
Применение цифровых систем позволяет устранить основные недостатки аналоговых систем управления. Вместе с тем, следует отметить, что широкое использование цифровых систем управления пока еще сдерживается их большой стоимостью и сложностью разработки.
Очень важным является то, что математическое описание и анализ большинства современных цифровых систем управления базируются на методах анализа аналоговых систем.
1. Актуальность темы
В процессе развития науки и техники повышаются требования к производственным процессам. Поскольку аналоговые системы не всегда удовлетворяют поставленным задачам, все большую актуальность приобретают системы цифрового управления.
Аналоговые системы восприимчивы к изменению внешних воздействий, характеризуются низкой точностью передачи аналоговых сигналов на большие расстояния и трудоемки в настройке. Все это приводит к снижению качества управления.
Кроме того, управление производственными процессами требует логической увязки различной информации и данных. Поэтому возникла необходимость разработки микропроцессорной системы импульсно-фазового управления (СИФУ).
2. Цель и задачи исследования, планируемые результаты
Магистерская работа посвящена разработке и исследованию программного алгоритма СИФУ тиристорного регулятора напряжения.
Целью работы является создание программного алгоритма управления (АУ), который будет характеризоваться эффективностью, гибкостью, быстродействием и оптимальностью, а также определение влияния погрешности работы СИФУ на работу системы тиристорный регулятор напряжения – асинхронный двигатель (ТРН-АД).
Для достижения поставленной цели в работе необходимо решить следующие задачи:
- разработать собственный АУ;
- разработать математическую модель системы ТРН-АД;
- выполнить анализ влияния погрешности угла управления на амплитуду колебаний момента и отклонение угловой скорости двигателя;
- достичь необходимой точности при формировании управляющих импульсов.
3. Требования к системе импульсно-фазового управления
Системой импульсно-фазового управления называется совокупность устройств и элементов, которая обеспечивает заданную последовательность выходных импульсов.
Требования, предъявляемые к СИФУ вентильного преобразователя, определяются типом вентиля, режимом работы и видом нагрузки.
Основные требования к СИФУ:
- Управляющий импульс должен иметь достаточную для надежного отпирания вентиля амплитуду напряжения и тока (для тиристоров 10-20 В, 20-2000мА).
- В СИФУ крутизна переднего фронта импульса должна быть в диапазоне 150-200 В/эл.град и более.
- Обеспечение минимально необходимой длительности отпирающих импульсов (от 5 до 20 мкс).
- Широкий диапазон регулирования определяется типом преобразователя, режимом его работы и характером нагрузки.
- Импульсы управления должны быть симметричны.
- СИФУ не должна влиять на быстродействие регулируемого преобразователя.
Поскольку необходимо реализовать АУ силовым тиристорным регулятором напряжения (ТРН), то добавляется ряд требований определяющих эффективность программного решения.
Эффективность АУ микропроцессорной СИФУ определяется следующими параметрами:
- Возможность реализации алгоритма на базе недорогих однокристальных микроконтроллеров (МК).
- Точность выполнения временных задержек для каждого выходного канала.
- Гибкость алгоритма, позволяющего без существенных доработок изменять порядок коммутации, в том числе введение дополнительных функций.
4. Обзор известных семейств микроконтроллеров
Для программной реализации АУ необходимо выбрать МК. Рассмотрим доступные варианты.
AVR – восьмибитные МК компании Atmel. Имеют гарвардскую архитектуру и RISC-ядро с более развитой системой команд, которая насчитывает до 133 инструкций. Большинство инструкций выполняется за один такт. Программное обеспечение распространяется бесплатно. Все МК совместимы между собой от ранних до поздних версий. Возможно программирование на языке высокого уровня C.
Arduino – платформа для быстрой разработки различных электронных систем. Преимущественно в устройствах Arduino применяются AVR МК. Язык программирования платформы основан на C/C++. Arduino имеет полностью открытое программное и аппаратное обеспечение.
STM32 – 32-разрядный МК с Flash-памятью на основе ядра ARM Cortex-M. Данные МК имеют гарвардскую архитектуру и усовершенствованную RISC-архитектуру ядра. Cortex – микроконтроллерное ядро включающее в себя различную периферию. Подсемейство Cortex-M предназначено для микроконтроллерных приложений, когда требуется малая стоимость и низкое энергопотребление. МК STM32 совместимы снизу вверх
. Имеется широкий выбор отладочных плат.
Существуют и другие довольно распространенные семейства МК, такие как:
- MCS 51 – 8-битный однокристальный МК с гарвардской архитектурой компании Intel;
- MSP430 – 16-битный МК с фон-неймановской архитектурой компании
Texas Instruments
; - PIC – 8-ми, 16-ти и 32-битные МК с гарвардской архитектурой компания Microchip Technology.
Но они не имеют существенных преимуществ по сравнению с рассмотренными выше системами (AVR и STM32 семействами МК).
Далее рассмотрим достоинства и недостатки каждого из принятых решений.
МК AVR компании Atmel обладают следующими характеристиками:
- RISC-архитектура ядра процессора;
- 8-разрядное микропроцессорное ядро;
- гарвардская архитектура (хранение инструкций и данных в разных адресных пространствах);
- 32 8-битных регистра общего назначения;
- энергонезависимая Flash-память программ 1 до 256 Кбайт;
- количество циклов перезаписи Flash-памяти 10000;
- энергонезависимая память данных EEPROM от 64 Байт до 4 Кбайт;
- количество циклов перезаписи EEPROM 100 000;
- оперативная память SRAM от 64 Байт до 8 Кбайт;
- порты ввода/вывода – от 3 до 86;
- таймеры-счетчики – от 1 до 4 разрядностью 8-/16-бит;
- сторожевой таймер (WatchDog Timer);
- аналоговые компараторы;
- поддержка прерываний;
- ШИМ-модулятор (PWM);
- многоканальный аналогово-цифровой преобразователь;
- интерфейсы: UART, SPI, TWI, JTAG, USB, CAN, LIN;
- диапазон напряжения питания от 1,8 В до 5,5 В;
- различные источники тактовых импульсов: кварцевый резонатор, внешний или внутренний RC-генератор;
- тактовая частота от 1МГц до 20МГц;
- часы реального времени RTC (семейство Mega);
- несколько режимов энергосбережения;
- оптимизация архитектуры под язык высокого уровня C;
- достаточное количество свободных средств разработки;
- совместимость МК между собой от ранних до поздних версий;
- возможность моделирования работы МК в среде программного пакета Proteus.
Недостатки МК AVR:
- недостаточное быстродействие;
- низкая тактовая частота;
- малое количество таймеров;
- отсутствие прямого доступа к памяти в большинстве моделей.
Характеристики платформы Arduino:
- простота освоения и разработки;
- языки программирования Arduino и С++;
- бесплатная среда программирования
Arduino IDE
, которая работает на операционных системах Windows, Macintosh OSX и Linux; - программирование через порт USB (не требуется программатор);
- широкий выбор различных плат расширения;
- диапазон напряжения питания от 7 В до 12 В;
- преимущественно применяются МК AVR (плата Arduino Due основана на микропроцессоре Atmel SAM3X8E ARM Cortex-M3).
Недостатки платформы Arduino:
- высокая стоимость готовых плат;
- низкое быстродействие;
- большинство платформ построены на МК AVR;
- больше подходит для быстрого освоения и любительских проектов, чем для промышленных решений;
- обязательная прошивка загрузчика в память МК размером 2 Кбайта;
- объемный исполняемый код;
- недостаточная компактность готовых плат.
Характеристики МК STM32 компании ARM Limited:
- RISC-архитектура ядра процессора;
- 32- разрядное микропроцессорное ядро;
- гарвардская архитектура;
- энергонезависимая Flash-память программ до 1 МБайт;
- оперативная память SRAM до 320 Кбайт;
- порты ввода/вывода до 168;
- несколько таймеров (16- и 32-разрядных);
- специальные ШИМ-таймеры;
- два сторожевых таймера;
- часы реального времени RTC (внутренний RC-генератор 32кГц и внешний кварцевый резонатор 32,768кГц);
- внешний кварцевый резонатор 4…26Мгц;
- встроенный контроллер векторных прерываний (NVIC);
- 12-разрядный аналогово-цифровой преобразователь;
- цифро-аналоговый преобразователь;
- многоканальный прямой доступ к памяти (DMA);
- интерфейсы: UART, SPI, I2C, I2S, JTAG, USB, CAN, LIN, Ethernet;
- диапазон напряжения питания от 1,8 В до 3,6 В;
- тактовая частота до 200МГц;
- температурный диапазон -40…105°C;
- достаточное количество свободных средств разработки;
- несколько режимов энергосбережения;
- совместимость МК
pin-to-pin
и по программному коду между собой; - возможно модельно-ориентированное программирование в пакете Matlab/Simulink.
Недостатки МК STM32:
- трудоемкость пайки МК;
- более сложное обучение написанию программ для данных МК.
Каждое из рассмотренных решений обладает своими достоинствами и недостатками, поэтому для разработки был принят наиболее доступный и распространенный вариант – МК AVR серии ATMega.
5. Реализация алгоритма управления
Реализация алгоритма СИФУ сводится к управлению тиристорами с осуществлением заданных временных задержек с высокой точностью. Временные задержки требуется осуществлять независимо для каждого из каналов, а время отсчитывается от входа синхронизации.
Первый подход (рисунок 1) состоит в отсчете времени при помощи виртуальных счетчиков, модифицируемых при прерывании по переполнению одного интегрального таймера. Такой подход позволяет реализовать простой алгоритм СИФУ, отличающийся гибкостью и универсальностью. Однако параметры точности в данном случае будут определяться периодом прерываний и на практике для МК серии AVR составят 50-100мкс, что в некоторых случаях не допустимо.
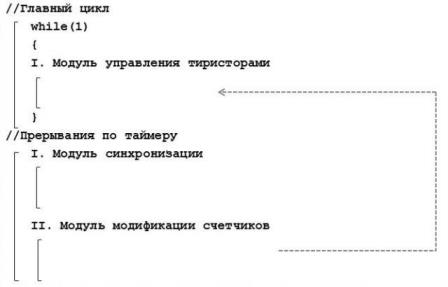
Рисунок 1 – Первый подход к реализации АУ
Во втором подходе (рисунок 2) для отсчета времен средствами МК удобно использовать встроенные интегральные таймеры, причем учитывая длительность счета и требования к точности счета, эти таймеры должны быть как минимум шестнадцатибитные. При этом такие таймеры должны быть независимые для каждого канала, что не реализовано в доступных МК.
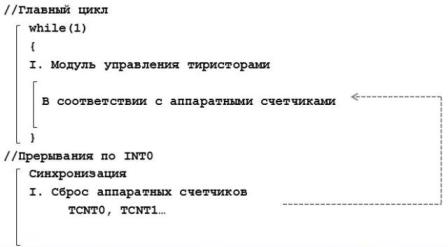
Рисунок 2 – Второй подход к реализации АУ
Альтернативным способом является принцип осуществления временных задержек при помощи виртуальных счетчиков, которые модифицируются в основном цикле программы. При этом счетчики модифицируются на величину времени, которое физически отсчитывается одним встроенным интегральным таймером, при переполнении которого прерывания не осуществляются. Для синхронизации при этом может быть использован вход МК, при изменении сигнала на котором формируется прерывание INT.
Алгоритм, реализующий описанный выше принцип приведен на рисунке 3. Практически алгоритм для моделирования и дальнейшего использования реализован на языке Cи.
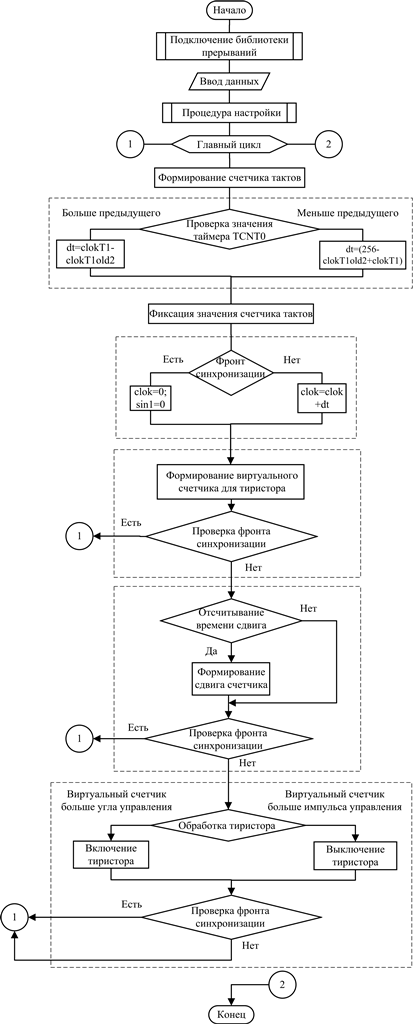
Рисунок 3 – Блок-схема программного алгоритма
6. Модель системы ТРН-АД
Тиристорный регулятор напряжения – устройство, предназначенное для регулирования напряжения подаваемого на асинхронный двигатель. ТРН состоит из трех пар тиристоров по одной для каждой фазы напряжения. Силовые элементы включены встречно-параллельно для протекания синусоидального тока в двух направлениях.
ТРН широко применяются для регулирования скорости и плавного пуска асинхронных двигателей различной мощности. Данная схема обеспечивает также и реверс, в случае добавления двух пар тиристоров.
Изменение угла отпирания ключей осуществляется посредством СИФУ.
При разработке программного алгоритма СИФУ возникает вопрос необходимой точности подачи управляющих импульсов.
Для достижения поставленной цели была составлена модель (рисунок 4) в среде Simulink MATLAB, которая включает в себя: трехфазный источник питания, подсистему СИФУ и ТРН, АД, блок для создания нагрузки, блок измерений.
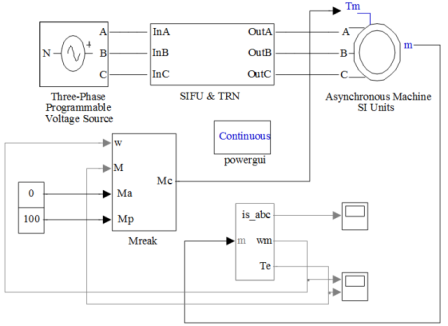
Рисунок 4 – Модель для исследования работы СИФУ ТРН
При схеме ТРН без нейтрального провода (рисунок 5), работа фаз регулятора становится зависимой, поэтому необходимо включать тиристоры попарно для соответствующих фаз. Коммутация тиристоров осуществляется в следующей последовательности: VS1+VS6, VS6+VS3, VS3+VS2, VS2+VS5, VS5+VS4, VS4+VS1.
Рисунок 5 – Схема ТРН без нейтрального провода (анимация 6 кадров, 7 циклов повторения, 37,5 килобайт)
Все импульсы управления тиристорами следуют друг за другом с интервалом в 60°. Угол управления, алгоритм подачи и длина импульсов описаны в m-файле. Также в нём задается величина погрешности управления в секундах и выполняется увеличение угла отпирания положительного тиристора фазы А и отрицательного тиристора фазы С на величину этой погрешности.
При реализации СИФУ для регулятора напряжения было учтено, что при угле управления тиристорами α>90°, ток в пределах полуволны положительной и отрицательной полярности разрывается. Для этого при включении тиристора в следующей фазе, подается повторный импульс на работающий силовой ключ.
7. Исследование влияния погрешности
В ходе исследования было выявлено, что колебания момента возрастают при увеличении погрешности подачи импульса. На рисунке 6 штриховой линии соответствует момент при отсутствии погрешности Δt=0 мкс, а сплошной – момент при погрешности Δt=200 мкс. Угол управления равен α=90°. Аналогичная зависимость построена и для угла α=120° (рисунок 7).
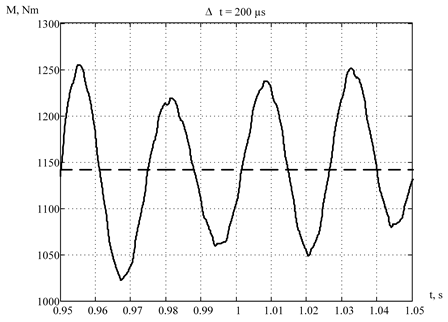
Рисунок 6 – Момент двигателя при Δt=0 мкс и Δt=200 мкс (α=90°)
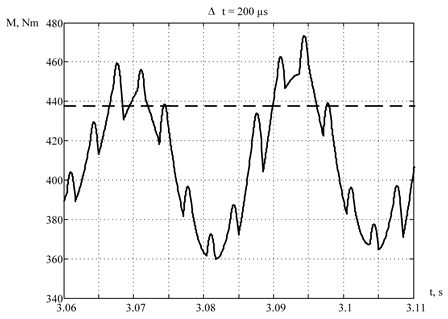
Рисунок 7 – Момент двигателя при Δt=0 мкс и Δt=200 мкс (α=120°)
Для определения необходимой точности СИФУ построим зависимость амплитуды колебаний момента и отклонения угловой скорости от величины погрешности для углов управления α=90° и α=120° (рисунок 8,9).
Полученные зависимости показывают увеличение амплитуды колебаний момента и снижение угловой скорости при увеличении погрешности подачи импульсов управления тиристорами.
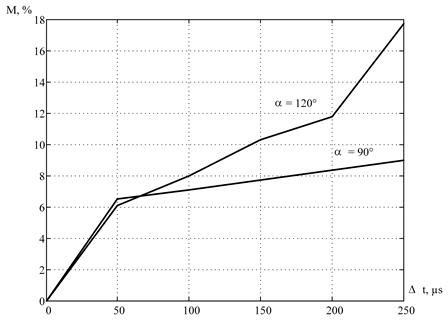
Рисунок 8 – Зависимость амплитуды колебаний момента двигателя от погрешности угла управления
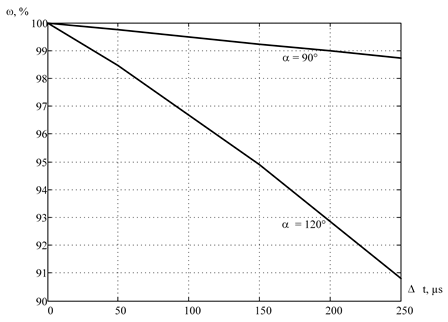
Рисунок 9 – Зависимость отклонения угловой скорости двигателя от погрешности угла управления
На рисунке 8 допустимая погрешность составляет не более 38-41 мкс, так как амплитуда колебаний момента увеличивается до 5%. Для скорости – не более 150 мкс (рисунок 9).
Выводы
В соответствии с целью и задачами магистерской работы проведены теоретические исследования СИФУ. Описаны основные требования к СИФУ. Также перечислены параметры определяющие эффективность микропроцессорного АУ.
Выполнен обзор известных семейств МК. Подробно рассмотрены их характеристики, представлены достоинства и недостатки. Это позволило принять к разработке МК AVR серии ATMega, как наиболее доступный и распространенный вариант.
Проведен анализ возможных вариантов реализации программного алгоритма. На основе данного анализа был разработан собственный альтернативный подход к выполнению программы управления.
Изучен принцип работы системы ТРН-АД, после чего составлена модель в приложении Simulink пакета Matlab и приведено ее общее описание. На основе данной модели выполнены исследования влияния точности подачи управляющих импульсов на амплитуду колебаний момента и отклонение угловой скорости. Построены зависимости для углов управления α=90° и α=120°. В результате исследования модели работы системы ТРН-АД определена максимально допустимая погрешность СИФУ не более 38 мкс.
На момент написания данного реферата магистерская работа еще не завершена. Ориентировочная дата завершения магистерской работы: июнь 2019 года. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты.
Список источников
- Силові напівпровідникові перетворювачі енергії : навч. посібник / О. О. Шавьолкін ; Харків. нац. ун-т. міськ. госп-ва ім. О. М. Бекетова.–Харків : ХНУМГ ім. О. М. Бекетова, 2015.–403 с.
- Полунин, А. И. Оптимизация систем управления плавного пуска ленточными конвейерами / А. И. Полунин, А. В. Лавшонок // Автоматизация технологических объектов и процессов. Поиск молодых ; сборник научных трудов XVI Международной научно-технической конференции аспирантов и студентов, 25-26 мая 2016 г., г. Донецк : в рамках 2-го Международного научного форума "Инновационные перспективы Донбасса".–Донецк : ДОННТУ, 2016.–С. 190–193.
- Datasheet. ATmega16(L)/ Электронный ресурс. Режим доступа: http://www.atmel.com/...
- Программирование на языке C для AVR и PIC микроконтроллеров./ Сост. Ю.А. Шпак–К.: «МК-Пресс», 2006. 400 с., ил.
- Асинхронный электропривод горных машин с тиристорными коммутаторами. Маренич К. Н.–Донецк: ДонГТУ, 1997–64 с.
- Черных, И. В. Моделирование электротехнических устройств в MATLAB, SimPowerSystems и Simulink / И. В. Черных.–Москва : ДМК Пресс, 2007.–288 с.
- Полунин, А. И., Киселева Я. А. Алгоритм управления системой плавного пуска ленточными конвейерами / А. И. Полунин, Я. А. Киселева, А. В. Лавшонок // Автоматизация технологических объектов и процессов. Поиск молодых: сборник научных трудов ХVII научно-технической конференции аспирантов и студентов в г. Донецке 24-25 мая 2017 г. - Донецк : ДонНТУ, 2017.–409 с.
- Дьяконов В. Simulink 4. Специальный справочник.–СПб: Питер, 2002–528 с.: ил.
- C/C++. Программирование на языке высокого уровня / Т. А. Павловская.–СПб.: Питер, 2003.–461 с: ил.
- Куцый О.Я. Программирование на языке Си. Пособие прилагаемое к курсам в Центр Компьютерного Обучения при МГТУ им. Н.Э.Баумана.–Москва: МГТУ, 2010.–84 с.
- Цифровые технологии. Электронный ресурс. Режим доступа: https://ru.wikipedia.org/...
- Васильев К. К. Теория автоматического управления (следящие системы): Учебное пособие.–2-е изд.– Ульяновск, 2001.–98 с.