Аннотация
В данной статье рассматривается симулятор промышленных роботов V-rep и его возможности, также в статье был произведен аналитический расчет траектории движения руки робота ABB IRB 140 и сравнение с траекторией, получаемой с помощью графопостроителя в робосимуляторе V-REP.
Ключевые слова:
симулятор, манипулятор, схват, матрица, графопостроитель
Введение
В наше время возможности эксплуатации роботов потрясающие, их используют повсюду, начиная от исследования космоса и заканчивая чисткой домов. Сочетание в роботах трех подсистем: актуатора, сенсора, и дистанционного управления делает их чрезвычайно эффективными но и в тоже время дорогостоящими, что в свою очередь не прощает ошибок. И тут к нам на помощь приходят различные программы - симуляторы, одной из таких программ является робосимулятор V-REP.
V-REP представляет собой среду для симулирования (sandbox) различных видов роботов, при этом пользователю нет необходимости иметь физический доступ к реальной машине, что экономит деньги и время. Среда V-REP предоставляет удобный интерфейс для визуализации действий робота в трёхмерном виртуальном пространстве намного раньше, чем реальный прототип робота будет создан.
Возможна самостоятельная сборка симулятора из приведенных кинематических, физических и графических библиотек, и решающее значение, с точки зрения производительности и точности симуляции, будут иметь архитектура и используемая методология. Надежный системный подход требует использования универсальных и масштабируемых стратегий моделирования. Кроме того управляющие программы пишутся на простом языке, что чрезвычайно удобно.
1. Функции моделирования V-Rep
V-REP разработан на базе универсальной архитектуры, и в нем нет главного или центрального модуля. Вместо этого V-REP состоит из относительно самостоятельных функциональных групп, которые могут быть включены или выключены по мере необходимости [2].
2. Объекты моделирования
Симуляционные модели V-REP содержат несколько объектов или элементов, которые собраны в древовидную иерархию. Ниже описаны сцены моделирования, поддерживаемые V-REP [1]:
• Сочленения: элементы, которые связывают два или более объекта сцены вместе, обеспечивая от одной до трех степеней свободы (призматические, вращательные, винтовые, или сферические). Они могут работать в различных режимах (например, в силовом/ вращательном режиме, режиме обратной кинематики и др.)
• Формы: треугольные полигональные сетки, используемые для моделирования и визуализации твердого тела.
• Бесконтактные датчики: Они вычисляют точное минимальное расстояние к части фигуры, которая находится в пределах обнаружения. Это дает непрерывную и более реалистичную симуляцию, чем обнаружение на основе большого количества направленных лучей.
• Визуальные датчики: визуальные датчики позволяют извлекать сложные изображения и информацию из сцен моделирования (цвета, размер объектов, глубина карты и др.). Встроенная фильтрация и функция обработки изображений запускает целый блок из фильтрующих элементов. Визуальные датчики используют аппаратное ускорение для получения RAW изображений (поддержка OpenGL).
• Датчики силы: они представляют собой жесткие связи между фигурами, которые могут записывать приложенные силы и крутящие моменты, и которые могут разрушаться при превышении заданного порога.
• Графики: графики могут записывать большое разнообразие предопределенных или пользовательских потоков данных. Потоки данных затем могут быть отображены напрямую (график по времени заданного типа данных), или в сочетании друг с другом для отображения X/Y графиков, или 3D кривых.
• Камеры: они позволяют визуализировать сцены, которые зависят от точки наблюдения.
• Освещение: освещают сцену или отдельные объекты сцены, и влияют на камеры или визуальные датчики.
• Пути: они определяют сложное движение в пространстве (последовательность свободно комбинируемых переводов, вращений и/или пауз), и используются, например, для направления сварочной горелки робота вдоль заданной траектории, или позволяют задать движение конвейерной ленты.
• Материальные точки: это вспомогательные системы отсчета, которые могут быть использованы для различных задач. В основном используются в сочетании с другими объектами сцены.
• Фрезы: могут быть использованы для имитации поверхности режущих операций на формы (например, фрезерование, лазерная резка и др.)
3. Вычислительные модули
Объекты моделирования редко используются самостоятельно, они скорее работают на или совместно с другими объектами (например, датчик приближения обнаруживает формы). Кроме того, V-REP предлагает несколько расчетных модулей, которые могут напрямую работать на одну или несколько сцен моделирования. Ниже приведены основные расчетные модули:
• Модуль кинематики: позволяет выполнять кинематические расчеты (прямые и обратные) для любого типа механизма (разветвленные, закрытые, с резервированием, содержащие вложенные циклы и др.). Модуль базируется на расчете наименьших затухающих квадратов.
• Динамический модуль: позволяет регулировать динамику расчета твердого тела и взаимодействия (столкновение, цепляние и др.) с помощью Bullet Physics Library и Open Dynamics Engine. Симуляции динамических систем до сих пор находятся на начальном этапе и часто основываются на приблизительных показателях. Для подтверждения результатов важно основываться не только на одном физическом движке.
• Модуль обнаружения столкновений: позволяет осуществлять быструю проверку столкновений между любой формой или набором фигур. Этот модуль является полностью независимым от ответа алгоритмов расчета динамики модуля. Используются структуры данных, основанных на бинарном дереве прямоугольных боксов для ускорения. Дополнительная оптимизация достигается за счет техники кэширования.
• Модуль расчета расстояния (Mech-mech модуль): позволяет быстро минимизировать расстояние расчета между любыми формами (выпуклые, вогнутые, открытые, закрытые и т.д.) или набором форм. Модуль использует те же структуры данных, что и модуль обнаружения столкновений.
• Модуль планирования движения: ручное планирование голономных и неголономных задач с помощью подхода, основанного на алгоритме Rapidly-exploring Random Tree (RRT). Задачи по планированию путей кинематических цепей также поддерживаются.
4. Аналитический расчет траектории движения робота ABB IRB
В качестве примера использования робосимулятора V-REP произведем аналитический расчет траектории движения робота ABB IRB 140 и сравним с траекторией, получаемой с помощью графопостроителя в робосимуляторе V-REP.
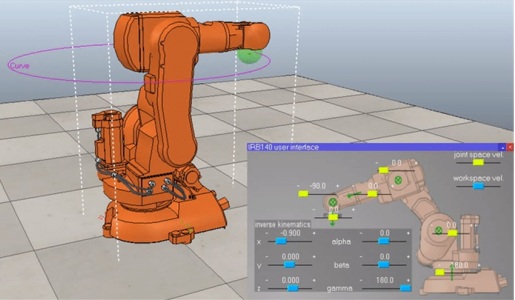
Рисунок 1 – Траектория движения робота ABB IRB 140 в робосимуляторе V-REP
Для аналитического описания траектории движения выходного звена необходимо определиться с системой координат звеньев манипулятора. Координатные оси расставлялись методом Денавита – Хартенберга.
Метод заключает в том что, каждая система координат формируется на основе следующих трех правил [3]:
1) ось zi-1направлена вдоль оси i–го сочленения;
2) ось xi перпендикулярна оси zi-1 и направлена от нее;
3) ось yi дополняет оси xi, zi до правой декартовой системы координат.
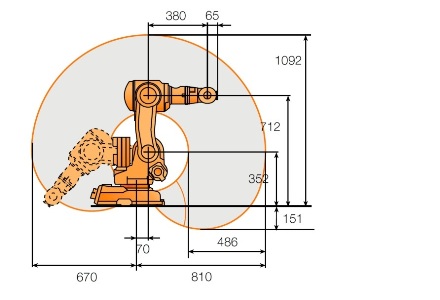
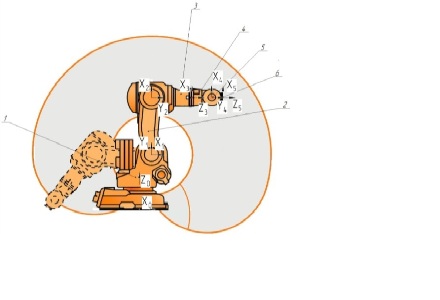
Рисунок 2 – Размеры и система координат звеньев робота ABB IRB 140
На рисунке 2 б показаны направления осей систем координат каждого звена работа.
Была составлена цепочка перемещений от 0 – го звена (ос¬нование манипулятора) до 5 – го звена, относительно которого особая точка неподвижна, после чего были составлены матрицы преобразования координат Денавита-Хартенберга для каждого перехода (рис. 3) [4, 5].
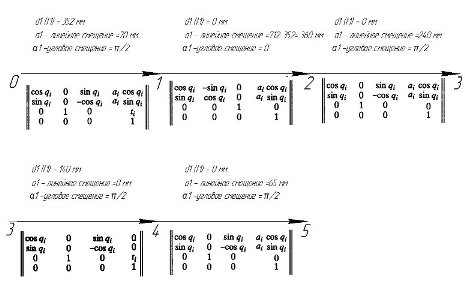
Рисунок 3 – Матрицы перехода от звена к звену
На рис. 4 представлены результаты решения прямой задачи о положении манипулятора с использованием пакета прикладных программ Mathcad.
Сравнение траектории движения робота, полученной расчетным способом и с помощью программы.
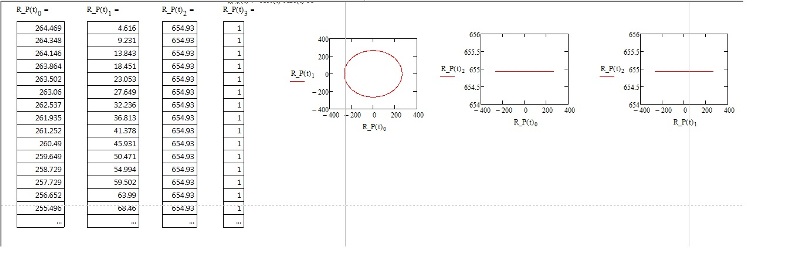
Рисунок 4 – Траектории движения робота, полученной расчетным способом
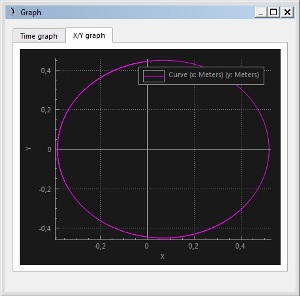
Рисунок 5 – Траектории движения робота, полученной с помощью программы
Из рисунков 4 и 5 видим, что траектория движения точки схвата в системе координат XY имеет узнаваемую форму круга, различием является разные числовые значения на системах координат, что объясняется различной метрической системой при вычислении.
Заключение: V-REP представляет собой универсальную и масштабируемую среду моделирования. К сегодняшнему дню V-REP вырос до надежного и широко используемого в научной и промышленной сфере тренажера роботов и контроллеров. Он выполняет самые различные задачи: от проверки системы, оптимизации алгоритмов, моделирования сложных сборочных цепей в автоматизации производств до планирования задач для роботов и контроллеров.
V-REP удобен для наглядного представления движений робота при решении кинематических и динамических задач манипулятора робота.
Выводы
Входи иследования было доказано что данная программа является адекватной, что позволяет использовать ее в дальнейших иследованиях.
При написании данного реферата магистерская работа еще не завершена. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя.
Список источников
- V-REP – гибкая и масштабируемая платформа для робомоделирования : автор статьи: marc@coppeliarobotics.com - 18 августа 2015, – Режим доступа к журн. : https://habr.com/post/268313/.
- Использование Remote API в робосимуляторе V-REP : автор статьи: Шалыгайло Сергей ar1 - 6 октября 2015, – Режим доступа к журн. : https://habrahabr.ru/post/268313/.
- Представление Денавита–Хартенберга : автор статьи: Studfiles2 - 02.05.2014, - Режим доступа к журн. : https://studfiles.net/preview/985240/page:9/.
- Корендясев А. И. Теоретические основы робототехники: монография : в 2-х кн. / Корендясев А. И., Саламандра Б. Л., Тывес Л. И. ; ред. Каплунов С. М.; Ин-т машиноведения им. Благонравова А. А.. - Москва : Наука, 2006. - . - ISBN 5-02-033952-0. Кн. 1 . - 2006. - 383 с. : ил. - Библиогр. в конце глав. - ISBN 5-02-034439-7.
- Булгаков А. Г. Промышленные роботы: кинематика, динамика, контроль и управление / Булгаков А. Г., Воробьев В. А. - Москва : СОЛОН-Пресс, 2007. - 485 с. : ил., табл.; 22 с. - (Серия "Библиотека инженера").; ISBN 978-5-91359-013-8.
- Учеб. пособие для втузов: В 3 кн. / Под ред. Фролова К. В., Воробьева Е. И.. Кн. 1 : Кинематика и динамика / Воробьев Е. И., Попов С. А., Шевелева Г. И.. – М. : Высш. шк. , 1988. – 304 с.: ил.
- Учеб. пособие для студ. вузов, обучающихся по спец. «Робототехнические системы» / Бурдаков С. Ф., Дьяченко В. А., Тимофеев А. Н. – М. : Высш. шк. , 1986 г. – 264 с.
- Учеб. пособие. – 2-е изд., перераб. и доп. – К.: Выща шк. , 1991 г. –311 с.
- Промышленные роботы в машиностроении: Альбом схем и чертежей: Учеб пособие для технических вузов / Соломенцев Ю. М., Жуков К. П., Павлов Ю. А. и др; Под общ ред Соломенцева Ю. М. – М. : Машиностроение, 1986 – 140 с.
- Костюк В. И., Гавриш А. П., Ямпольский Л. С, Карлов А. Г. Промышленные роботы. Конструирование, управление, эксплуатация. К. : Виша шк. Головное изд-во, 1985 г. – 359 с.Конструирование, управление, эксплуатация. К. : Виша шк. Головное изд-во, 1985г. — 359 с.