Автор: Демянчик А. Я., Шоль Н. Р.
В настоящее время известны работы [1, 2, 2] по обоснованию математических методов определения и прогнозирования предстоящих динамических нагрузок в упругих связях манипуляторного технологического оборудования лесных машин, необходимых для выполнения расчётов на прочность и долговечность. Математические модели, отражающие кинематические и упругие характеристики оборудования машин, позволяют установить характер их взаимосвязи с учетом величины воздействующих динамических нагрузок.
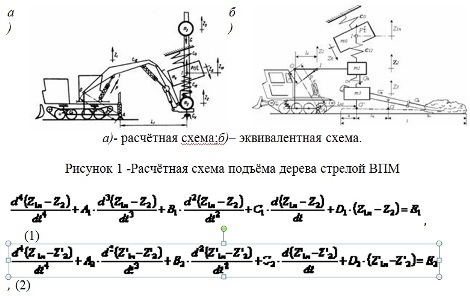
В работе [3] проведен анализ уравнений динамического взаимодействия масс с учетом их упругих взаимосвязей в основных режимах работы манипулятора лесосечных машин. Расчётные эквивалентные схемы в виде упругих систем с тремя степенями свободы приведены на рисунке 1. Перемещения масс динамической системы описано дифференциальными уравнениями и приводится в источнике ([2], с. 81). В общем виде уравнения представляем в виде:
Для более глубокого анализа взаимосвязей параметров процессов необходимо применить программный ресурс ПО MATLAB 6.0, позволяющий полноценно использовать встроенный пакет символьных вычислений Simbolic Math Toolbox. Данный программный ресурс позволяет определить динамические параметры манипулятора, решая дифференциальные уравнения 4 степени, в более широком задаваемом диапазоне варьирования параметров динамической системы.
Динамические перемещения ЗСУ с грузом является одним из основных показателей динамической нагруженности манипулятора, перемещения масс элементов которого зависят от жёсткостей связей между ними. В рассмотренных дифференциальных уравнениях (1) и (2) динамические перемещение ЗСУ с грузом и динамическая нагруженность элементов манипулятора имеют условно прямую взаимосвязь без учета изменения в этом процессе жесткостей упругих связей между массами, которые могут вызвать дополнительно возникающие динамические перемещения ЗСУ. Для более достоверной оценки динамического нагружения необходимо учитывать влияние дополнительного динамического перемещения ЗСУ на общую нагруженность элементов манипулятора. Подобный подход открывает новые возможности исследований достоверности динамического нагружения системы.
Реализация применяемого ПО осуществлена при диапазонах варьирования: приведенная жесткость стрелы от 200 до 550 кН/м; и приведенная жесткость рукояти от 1350 до 2400 кН/м .
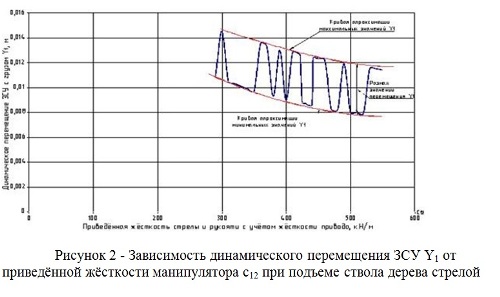
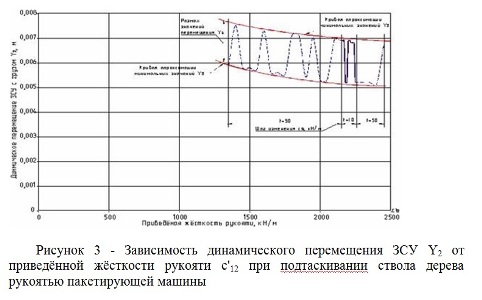
Расчёт производился на максимальный объём дерева (для пакетирующей машины =2м3, для валочно-пакетирующей машины =1м3) на максимальном вылете 5 м. На рисунке 2 показано изменение перемещения ЗСУ от приведенной жесткости манипулятора ВПМ, а на рисунке 3 для ПМ.
Из рисунков видно, что добавочное динамическое перемещение ЗСУ с грузом зависит от жёсткостей металлоконструкций, эта зависимость экспоненциальная с полем разброса значений. При этом имеется значительный размах величин, вызванный влиянием свободных колебаний ствола дерева в отличии от решения системы (1), (2) без учета дополнительных перемещений ЗСУ.
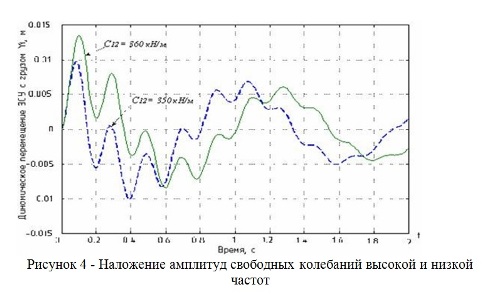
Наглядно процесс наложения амплитуды высокой частоты, вызванное свободными колебаниями ствола дерева на максимальное значение амплитуды низкой частоты колебания конструкции манипулятора (рисунок 4) расширяет наше представление о происходящем процессе. Применение ПО позволяет определять перемещение манипулятора во времени и создать точную картину колебательного процесса.
На нем рассмотрено перемещение ЗСУ с грузом при подъёме ствола дерева в режиме ПМ (ТБ-1), объёмом =2 м3, на вылете =5 м, при варьируемых значениях общей приведённой жёсткости стрелы с рукоятью .
На рисунке 4 видно, что при увеличении приведённой жёсткости =350 кН/м всего на 10 кН/м произошло совпадение фаз свободных колебаний высокой и низкой частоты, при этом дополнительное перемещение ЗСУ выросло на 40%, а значит и дополнительная динамическая нагрузка на манипулятор также возросла на 40%. В случае работы ВТМ значение дополнительного динамического перемещения изменилось ещё больше и составило 50-55% (рисунок 2).
Рисунки 2 и 3 показывают, что дополнительная динамическая нагрузка, имеет диапазон изменения значений, для каждого расчетного случая.
Возможность работы в условиях минимальных динамических перемещений, недопущение ситуации совпадения фаз свободных колебаний, гарантирует минимальную динамическую нагруженность технологического оборудования.
Полученные выводы позволяют наметить дальнейшие пути для уменьшения динамической нагруженности конструкции манипуляторов лесных машин за счет совершенствования структуры манипулятора и применения упругих связей между массами с параметрами варьирования их жесткостей.