
Зміст
- Вступ
- 1. Актуальність теми
- 2. Мета і завдання дослідження, плановані результати
- 3. Огляд існуючих розробок
- 4. Обгрунтування прийнятого напрямку розробки САУ водовідливної установкою
- 5. Методика виконання завдання і поточні результати
- Висновки
- Список джерел
Вступ
Водовідливна установка – це комплекс технічних засобів для видалення води з гірських виробок і видачі її на поверхню. Водовідлив гірничих підприємств є важливим елементом всього комплексу гірничотехнічного обладнання, і його надійна робота багато в чому визначає безперебійність і безпеку ведення гірських робіт з видобутку корисних копалин [1]. Як і будь-яка інша важлива система забезпечення, вона вимагає економічно обґрунтованих технічних рішень на етапах її проектування і автоматизації.
Шахтна водовідливні установка являє собою складне спорудження, що включає в себе: комплекс гірничих виробок, насосні агрегати різної продуктивності, трубні колектори, систему електропостачання і апаратуру автоматизації. Вона повинна забезпечувати відкачку води з гірських виробок, маючи при цьому високу надійність і економічність. Відкачувана вода після підйому на поверхню і подальшого очищення може бути використана для технологічних потреб. Для забезпечення надійності водовідлив проектують з запасом по ємності водозбірника і резервом насосних агрегатів, забезпечується резервування електропостачання та дублювання трубопроводів [2].
З огляду на різноманіття типів водовідливу, різноманітність гідрогеологічних і гірничотехнічних умов шахт і копалень, для автоматизації цього процесу використовується, як правило, серійна апаратура [3].
Для підвищення ефективності цієї апаратури доцільно переводити її на сучасну елементну базу з застосуванням засобів обчислювальної техніки.
1. Актуальність теми
Водовідливні установки гірничих підприємств, що відпрацьовують обводнені ділянки, являють собою складний енергомеханічний комплекс, автоматизація якого дуже актуальна.
На рисунці 1 представлена гідравлічна схема роботи насосного агрегату при відкачці води з водозбірного колодязя, де 1 – приймальний колодязь; 2 – підвідний трубопровід, обладнаний приймальною сіткою ПС (оберігає від надходження в трубопровід твердого розміром більшим, ніж 0.3-0.5 ширини вихідної щілини робочого колеса) і зворотним клапаном ОК (який перешкоджає витіканню води з проточної частини основного насоса при заливці); 3 – насос; 4 – нагнітальний трубопровід зі зворотним клапаном ОК (призначений для збереження води в нагнітальному трубопроводі при стоянці насосів, недопущення зворотного руху води при зупинці насосів і захисту насоса від гідравлічного удару при позаплановій зупинці), регулювальної засувкою ЗР з приводом ПЗ (служить для зміни режимів роботи агрегату) і кінцевими вимикачами положення КВО, КВЗ; Qт – витратомір, встановлений на трубопроводі, що підводить; hт – рівнемір, розташований в приймальному колодязі водозбірника [3].
Рисунок 1 – Технологічна схема насосної установки головного водовідливу шахти (анімація: 8 кадрів, нескінченний цикл повторення, 8 кілобайт)
Економічна і надійна робота водовідливної установки багато в чому визначається умовами фактичного режиму роботи насоса на зовнішню мережу, які в процесі експлуатації постійно змінюються внаслідок підвищеного зносу устаткування при перекачуванні вод зі взвесями, кислих вод, «заростанні» елементів трубопровідної мережі, кавітаційних явищах, зашламлені водозбірних ємностей. В результаті сукупного впливу цих чинників змінюються робочі параметри насосної установки: подача, напір, к.к.д., що в свою чергу призводить до перевитрати електроенергії на водовідлив [3-5].
На режим роботи водовідливної установки впливають ряд параметрів, які визначають її поточний стан:
- Q – подача водовідливної установки;
- H – натиск водовідливної установки;
- HВ – вакуумметрична висота всмоктування;
- HГ – геодезична висота нагнітання;
- N – потужність водовідливу;
- Е – питомі енерговитрати водовідливу;
- η – коефіцієнт корисної дії водовідливу;
- QП – годинний приплив шахти;
- ρ – щільність рідини;
- dВ – діаметр усмоктувального трубопроводу;
- dН – діаметр нагнітального трубопроводу;
- LВ – довжина всмоктувального трубопроводу;
- LН – довжина нагнітального трубопроводу;
- αВ – гідравлічний опір всмоктуючого трубопроводу;
- αН – гідравлічний опір нагнітального трубопроводу.
Аналіз впливу цих параметрів на режим роботи водовідливу показує його неоднозначність. Кожен параметр певним чином впливає на робочий режим водовідливу, однак, можна виділити три групи параметрів: умовно-постійні, обурюючі, керовані.
Умовно-постійні параметри або залишаються незмінними, або незначно і повільно змінюються в процесі експлуатації. До даної групи параметрів відносяться такі технічні характеристики водовідливу, як dВ, dH, LВ, LH, N, η, HВ, HГ, які визначають власні динамічні властивості об'єкта управління і застосовуються при визначенні постійних часу і коефіцієнтів передачі елементів водовідливу.
Керовані параметри – це такі змінні, вплив на які дозволяє отримувати необхідні режими роботи об'єкта управління. Для водовідливної установки це такі змінні: Q, H. Як відомо, водовідливні установки вугільних шахт, як правило, оснащуються відцентровими секційними насосами. В цьому випадку керовані параметри Q, H взаємопов'язані. Це призводить до того, що при впливі на один з керованих параметрів будуть змінюватися і інші керовані параметри. Тому необхідно враховувати цю особливість при розробці принципів управління водовідливом.
На водовідливну установку діє такий обурюючий вплив, як годинний приплив шахти QП.
Робочий режим водовідливної установки графічно визначається точкою перетину робочих характеристик насоса і нагнітального трубопроводу. Наведені на рисунці 2 робочі параметри насосної установки Qр и Hр є основними параметрами і відносяться до керованих. Однак режим роботи водовідливної установки визначається всіма розглянутими параметрами.
Точка А на рисунці 2 позначає розрахунковий режим роботи насоса з характеристикою HН=f(Q) на напірний трубопровід з характеристикою HТ=f(Q). Однак в процесі експлуатації відбувається зміна робочого режиму і його параметрів через вплив розглянутих збурень і під дією зовнішніх умов. Тому отримуємо не робочу точку, а робочу область ABCD – рисунок 3.
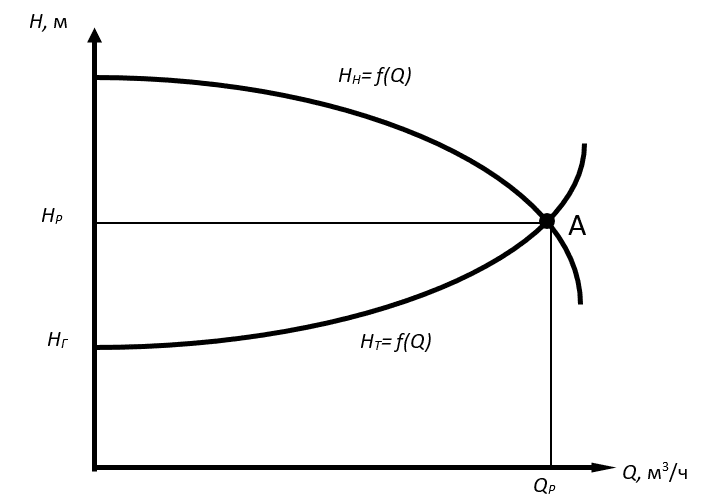
Рисунок 2 – Робочий режим водовідливної установки
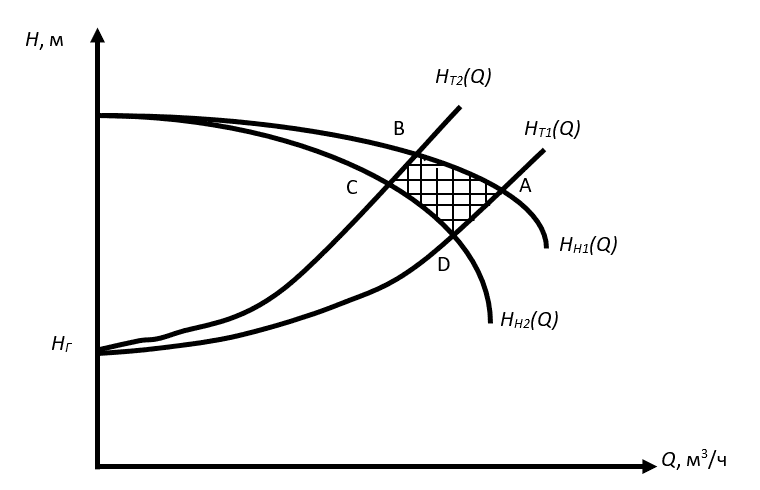
Рисунок 3 – Робоча область водовідливної установки
В результаті аналізу об'єкта управління – головної водовідливної установки шахти – були виявлені такі основні проблеми, які потребують проектування системи автоматизації, як: мінливість подачі і напору водовідливної установки; коливальність тиску води, необхідність безпосереднього людського втручання для зміни уставки існуючої системи зниження тиску води. Як наслідок, ці проблеми спричинили перевитрату електроенергії, а також зниження надійності і терміну експлуатації водовідливної установки через надмірне навантаження.
Система автоматичного управління дозволить оптимізувати процеси підтримки основних технологічних параметрів, збільшити надійність водовідливної установки, знизити витрати на її утримання і обслуговування, а також витрати на електроенергію.
2. Мета і завдання дослідження, плановані результати
Мета – забезпечення надійності та економічного функціонування процесу водовідливу, що дозволить виключити затоплення гірничих виробок і створити безпечні умови для ведення гірничих робіт.
Основні функції, що виконує САУ:
- плавний пуск і зупинка насоса на закриту засувку;
- управління засувкою (для виключення гідроударів і закидів тиску) під час пуску і зупинці насосного агрегату;
- автоматичне включення в роботу допоміжного робочого агрегату при досягненні водою верхнього рівня і безперервну його роботу до нижнього рівня;
- автоматичне включення в роботу резервного насосного агрегату, якщо відмовив основний насос або він не справляється з припливом і вода досягла аварійного рівня;
- аварійний останов насоса при зниженні або втраті подачі;
- автоматичний контроль основних технологічних параметрів водовідливної установки – подачі, напору, рівнів води в водозбірнику;
- забезпечення оптимального енергоспоживання.
3. Огляд існуючих розробок
В даний час у вугільній промисловості для автоматизації водовідливів найбільш часто застосовуються системи автоматичного управління ВАВ, ВАВ-1м [6].
Вибухобезпечна апаратура типу ВАВ призначена для автоматичного управління водовідливними установками, що мають до дев'яти насосних агрегатів з високо- і низьковольтними двигунами.
Апаратура ВАВ забезпечена блокуваннями, що запобігають: пуск агрегату при незалитому насосі, включення приводу засувки до пуску насосного агрегату, останов агрегату до моменту повного закриття засувки, включення агрегату при відсутності води в водозбірнику, а також повторне включення відключити насоса, до з'ясування причин аварії. Передбачені наступні види захистів, що викликають аварійний останов: при зниженні або втраті продуктивності, при перегріванні підшипників, при зникненні напруги або короткому замиканні в ланцюгах управління.
Рівень води в водозбірнику контролюється за допомогою датчиків рівня. Висота підвісу датчиків вибирається таким чином, щоб число пусків і зупинок насосів на добу було мінімально. При досягненні водою датчика верхнього рівня включається один з насосів робочої групи. Якщо, незважаючи на це, рівень води в водозбірнику підвищується, то вода піднімається до датчика підвищеного рівня, який включає другий насос робочої групи. При зниженні води до датчика нижнього рівня відбувається відключення насосів, після чого рівень води починає підвищуватися, поки не спрацює датчик верхнього рівня і процес повторюється. Датчик аварійного рівня сигналізує диспетчеру при неприпустимо високому рівні води в водозбірнику. Сигнал про аварійне відключення насоса формується системою захисту, при його появі схема управління забезпечує включення насоса резервної групи. Інформація про рівень води в водозбірнику і стані насосних агрегатів, а також сигналізація про аварію, виводиться на пульт диспетчера [7].
Апаратура ВАВ-1м є найбільш сучасною, з найбільшим набором виконуваних функцій. Уніфікована вибухобезпечна апаратура автоматизації водовідливних установок ВАВ-1м призначена для автоматичного, дистанційного і місцевого управління головними водовідливними установками гірничих підприємств.
В апаратурі ВАВ-1м передбачено:
- автоматичне, дистанційне і місцеве управління роботою насосів, їх автоматична заливка перед пуском;
- автоматичний перехід на наступний насос при несправності робочого;
- циклічність роботи насосів, послідовність їх запуску і зупинки при паралельній роботі;
- заборона пуску несправного насоса;
- облік машинного часу роботи насосів;
- автоматичне керування приводом засувки;
- можливість автоматичної або ручної заборони пуску насосів на час максимуму енергоспоживання;
- індикація інформації про рівень води в водозбірнику, про роботу насосів і їх несправності з розшифровкою виду несправності, про машинний час роботи кожного насоса.
Аналіз функціональних можливостей систем автоматизації ВАВ і ВАВ-1м показує відсутність функцій управління водовідливної установкою в динамічних режимах. Некероване протягом перехідних процесів призводить до різкого підвищення тиску, стрибків і пульсаціям тиску, а іноді – і до гідравлічних ударів. Спільний вплив перерахованих явищ на проточну частину водовідливної установки викликає інтенсивний знос обладнання водовідливу, що знижує довговічність, надійність, безпеку даного технологічного процесу.
4. Обгрунтування прийнятого напрямку розробки САУ водовідливної установкою
Оптимальною для досліджуваної водовідливної установки є концепція замкнутої системи зі зворотним зв'язком, наведена на рисунці 4.
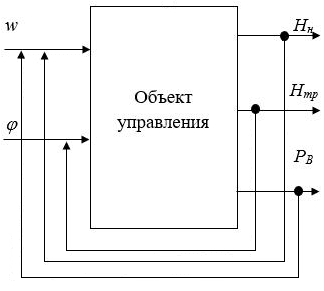
Рисунок 4 – Концепція структурної схеми створюваної системи
Об'єктом управління виступає водовідливна установка, вихідними змінними якої є напірна характеристика насоса НН, напірна характеристика трубопроводу Нтр і потужність РВ, споживана водовідливом. Управління вихідними змінними здійснюється за допомогою засувки, головним параметром якої є кут її відкриття φ і може змінюватися в межах від 0 до 90 градусів, і частоти обертання приводного електродвигуна w. При відхиленні напірної характеристики трубопроводу від номінального режиму роботи формується сигнал неузгодженості в ланцюзі і змінюється кут повороту засувки. При відхиленні напірної характеристики насоса і потужності від номінального режиму робота формується сигнал неузгодженості в ланцюзі і змінюється частота обертання двигуна [8-9].
5. Методика виконання завдання і поточні результати
Для запропонованих рішень необхідно визначити алгоритми управління по розглянутим контурам управління. На рисунку 5 наведена модель САУ водовідливної установкою з ПІД-регулятором у зовнішньому контурі стабілізації напору насоса.
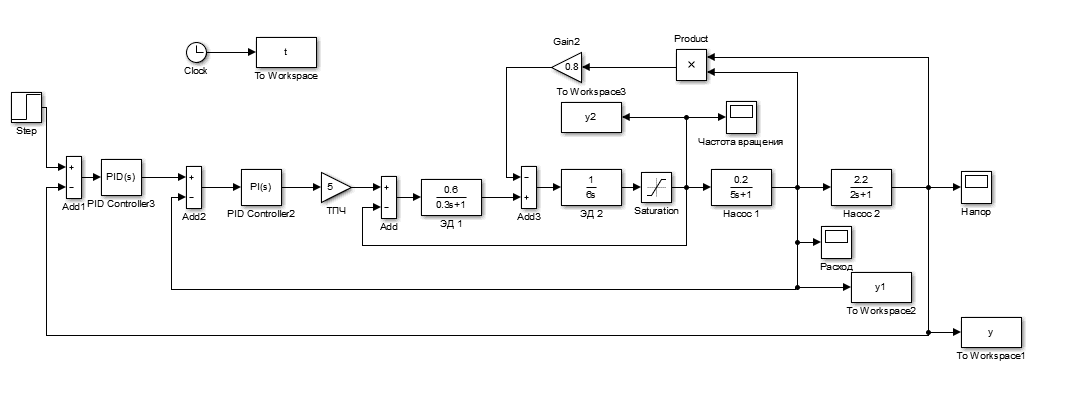
Рисунок 5 – Модель САУ водовідливної установкою
ПІД-регулятор має три параметра налаштування: коефіцієнт посилення регулятора kр, час інтегрування Tи, час диференціювання Tд. Його передавальна функція має вигляд [10]:
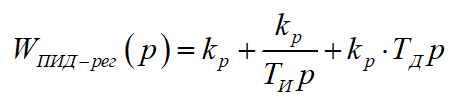
Для розрахунку настроювальних параметрів регуляторів застосуємо інструментальні засоби Matlab – блок PID Controller, у вікні якого були підібрані його коефіцієнти.
Підібравши оптимальні параметри для ПІД-регулятора отримуємо перехідні характеристики напору насоса (рис.6), подачі насоса (рис.7) і частоти обертання приводного електродвигуна (рис.8).
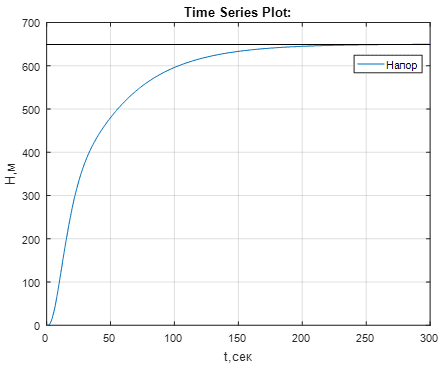
Рисунок 6 – Перехідна характеристика напору насоса з ПІД-регулятором у зовнішньому контурі стабілізації напору насоса
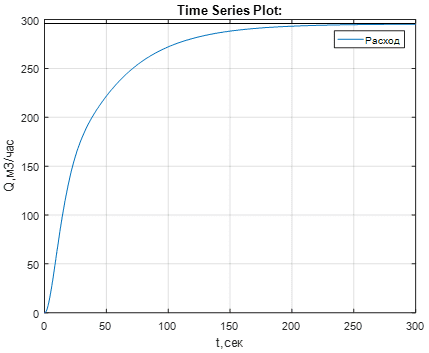
Рисунок 7 – Перехідна характеристика витрати з ПІД-регулятором у зовнішньому контурі стабілізації напору насоса
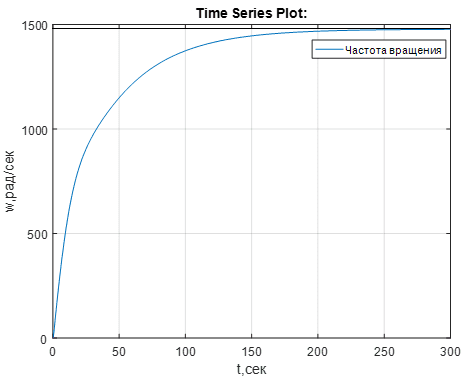
Рисунок 8 – Перехідна характеристика частоти обертання приводного електродвигуна з ПІД-регулятором у зовнішньому контурі стабілізації напору насоса
Аналіз отриманих перехідних характеристик (рис.6 – рис.8) показує задовільну якість регулювання. Регулятор напору прагне стабілізувати заданий натиск насоса на виході, відпрацьовує протягом 300 секунд, не виходячи за допустимий діапазон за напором 650 м, що відповідає вимогам, що пред'являються до системи. Регулятор витрати прагне стабілізувати задану подачу насоса, не виходячи за допустимий діапазон за подачею 300 м3/год. Частота обертання приводного електродвигуна також не виходить за допустимий діапазон 1500 об/хв. При цьому відсутнє перерегулирование, а встановлена помилка дорівнює нулю.
Висновки
Як об'єкт управління була розглянута водовідливна установка вугільної шахти.
Аналіз параметрів, що впливають на робочий режим водовідливної установки, дозволив скласти структурну схему об'єкта управління. Керуючими впливами були прийняті кут повороту засувки і частота обертання приводного електродвигуна. Вихідними параметрами виступають напірна характеристика насоса, напірна характеристика трубопроводу і потужність, споживана водовідливом.
За допомогою вбудованих засобів підстроювання пакета Matlab Simulink були розраховані коефіцієнти ПІ і ПІД-регуляторів. Якість перехідного процесу з використанням таких регуляторів повністю задовольняє користувача через відсутність статичної помилки і перерегулювання.
При написанні даного реферату магістерська робота ще не завершена. Остаточне завершення: червень 2019 року. Повний текст роботи та матеріали по темі можуть бути отримані у автора або його наукового керівника після зазначеної дати.
Список джерел
- Гейер В.Г., Тимошенко Г.М. Шахтные вентиляторные и водоотливные установки. / В. Гейер, Г. Тимошенко. – М.: Недра, 1987.– 270 с.
- Попов В.М. Рудничные водоотливные установки. – 2-е изд., перераб. и доп. / Попов В.М. – М.: Недра, 1983. – 304 с.
- Иванова А.А. Автоматизация процессов подземных горных работ. Под общей ред. / Иванова А.А. – Киев; Донецк: Вища шк., 1987. – 327 с.
- Толпежников Л.И. Автоматическое управление процессами шахт и рудников: Учебное пособие для вузов. – 2-е изд., перераб. и доп. / Толпежников Л.И. – М.: Недра, 1985. – 352 с.
- Гаврилов П.Д. Автоматизация производственных процессов. Учебник для вузов. / Гаврилов П.Д., Гимельштейн Л.Я., Медведев А.Е. – М.: Недра, 1985. – 215 с.
- Тимошенко Г.М. Научные основы проектирования и эксплуатации насосных установок в переходных режимах. / Тимошенко Г.М. – Киев; Донецк: Вища шк. Головное изд-во, 1986.– 127 с.
- Денисенко В. В. ПИД-регуляторы вопросы реализации часть 2 / Денисенко В. В. – М.: СТА 2008. № 1. с 86-99
- Зайцев Г.Ф. Теория автоматического управления и регулирования. / Зайцев Г.Ф. – Киев: Вища школа, 1988 – 431 с.
- Лукас В. А. Теория автоматического управления. / Лукас В. А. – М.: Недра, 1990. – 416 с.
- Дорф Р., Бишоп Р. Современные системы управления. / Р. Дорф, Р. Бишоп – М.: Лаборатория Базовых знаний – 2002 – 832 с.