Аннотация
В статье рассмотрена разработка система автоматического управления согласованным движением звеньев манипуляторов двурукого робота, выполняющего загрузочно-разгрузочные операции на производстве.
Введение
Робототехника – одна из важнейших и стремительно развивающихся наук, которая на сегодняшний день является неотъемлемой частью автоматизации и управления технических и технологических процессов.
Сегодня роботы успешно применяются в механообработке, штамповке, в кузнечно-прессовом и литейном производстве, в сварке, при нанесении покрытий и термообработке, а также в горнодобывающей промышленности, металлургии и промышленности (монтажные и ремонтные работы), в строительстве (монтажные, транспортные и отделочные работы), в легкой промышленности и сельском хозяйстве, в медицине (протезирование, хирургия, обслуживание), в исследовании и освоении океана и космоса, в выполнении различного рода спасательных работ, военном деле и т.д.
Цель разработки
Для автоматизации процесса транспортировочных работ тяжелых листовых и хрупких материалов в цехах на производстве предлагается использовать промышленный двурукий робот. Использование такого робота позволит уменьшить время выполняемых работ по разгрузке и транспортировке, а также исключить повреждения переносимых материалов. Это определяется наличием у робота программы действий, обусловленной заложенными в компьютер алгоритмами систем управления, т.к. он представляет собой программируемый универсальный манипулятор, снабженный внешними датчиками оценки положения и других параметров рабочего органа.
В данной работе разрабатывается система автоматического управления согласованным движением звеньев манипуляторов двурукого робота, выполняющего загрузочно-разгрузочные операции на производстве.
Проблематика объекта управления
Технологические процессы на производстве имеют сложный и достаточно непредсказуемый характер. В частности, технологический процесс перемещения сложных, хрупких и листовых материалов данным объектом – двуруким роботом представляет собой захват материалов двумя схватами (руками) робота, которые конструктивно представляют собой механические приводы.
Кроме того, для манипулирования габаритными грузами необходимо точное положение в пространстве одного схвата относительно другого. Таким образом, необходимо точное регулирование параметров двигателей соответствующих схватов.
Для обеспечения устойчивости приводов необходима реализация двусвязной электромеханической системы (ЭМС). Управление многосвязной ЭМС используется в непрерывных технологиях и осуществляется посредством двух уровней управления – нижнего и верхнего. На нижнем уровне обеспечивается управление локальными электроприводами по нескольким известным координатам: скорость w, момент Mэм. Верхний уровень управления предназначен для коррекции задающих, и соответственно, управляющих воздействий при регулировании вышеупомянутых координат электропривода с целью приведения системы к динамическому равновесию (стационарному состоянию).
Математическая модель
К основным технологическим малоинформационным параметрам относятся: моменты нагрузок, которые зависят как от состояния манипулируемых материалов, так и от рабочих органов (схватов).
Для учета моментов, возникающиx между схватами и манипулируемыми грузами, необходимо учесть момент упругой связи, который необходим для установления работы приводов в стационарное состояние.
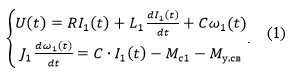
Тогда математическая модель привода первого схвата имеет вид:
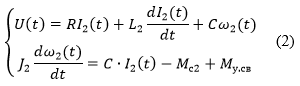
Если для первого привода момент упругой связи отрицательный, то, соответственно, для второго привода схвата он будет положительным и математическая модель будет построена следующим образом:
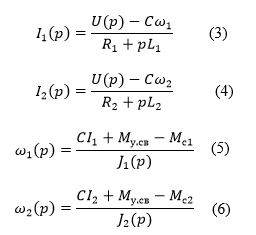
Применив преобразование Лапласа, получим решение систем (1) и (2) для токов якорей I1(p), I2(p) и скоростей вращения двигателей w1(p) и w2(p):
На основании выражений (3-6) можно построить структурную схему двухсвязной ЭМС (рис. 1).
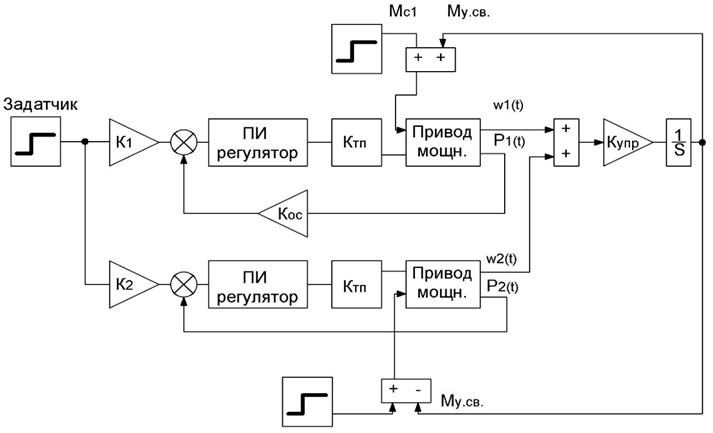
Рисунок 1 – Структурная схема двухсвязной ЭМС
Моделирование объекта
На рисунке 2 представлена модель двусвязной электромеханической системы для моделирования в прикладном пакете MATLAB. Каждый привод регулируется ПИ-регулятором, который обеспечивает малое время переходного процесса и высокое быстродействие системы. На двигатели подаются возмущения в виде моментов связи Mc1 и Mc2.
В данном случае, для упрощения модели используется одноконтурная система и Kос=1. Однако, для построения информативной модели с учетом всех параметров, необходима трехконтурная САУ привода, которая даст более четкое представление работы системы.
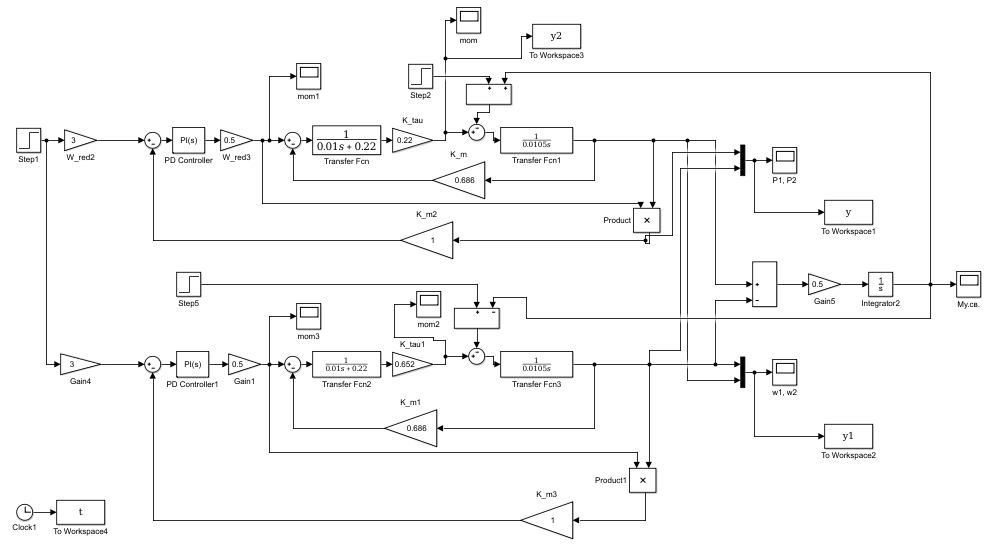
Рисунок 2 – Модель двусвязной ЭМС, управляемой по двум координатам мощность-мощность
Выводы
При анализе динамических процессов в параллельной схеме в большей степени обращается внимание на силовые связи между элементами системы, и как они влияют на устойчивость всей системы. В данном случае допускается, что манипулируемый материал является однородным по всей его площади и имеет одинаковые механические свойства.
Таким образом, можно сделать вывод, что для данного технологического процесса данная двусвязная электромеханическая система установится в равновесное состояние при любом (в рамках установленных ограничений) соотношении заданных мощностей за кратчайший период времени.
Перечень ссылок
1. С.Л. Зенкевич, А.С. Ющенко. Основы
управления манипуляционными роботами. – МГТУ им. Н. Э. Баумана, 2005 г.
2. Жукова Н.В. Автоматизированное управление малоинформативным
непрерывными технологическими процессами обработки металла давлением
//Труды Одесского политехнического университета: Научный и
производственно-практический сборник по техническим и естественным наукам,
Вып. 3(15). — Одесса: ОНПУ, 2001. — С. 16–24.
3. Жукова Н.В. Анализ регулируемых координат электропривода на предмет
их использования при формировании нижнего уровня управления
малоинформативным многосвязным электромеханическим объектом / Жукова Н.В.
// Зб. наук. пр. ДонДТУ. Сер. “Обчислювальна техніка та автоматизація”. –
Вип. 25. – Донецьк: ДонДТУ, 2001. – С. 45-54.